
隨著現(xiàn)代社會經(jīng)濟的迅猛發(fā)展,對供電系統(tǒng)的容量和可靠性提出了更高的要求。傳統(tǒng)的集中供電模式由于其成本高、可靠性差已被證明不能滿足需要,新型的分布式供電模式成為當今電源技術(shù)發(fā)展的趨勢,它促使逆變電源" title="逆變電源">逆變電源向智能化,數(shù)字化的方向發(fā)展。為了實現(xiàn)穩(wěn)定可靠的分布式電源系統(tǒng),逆變器" title="逆變器">逆變器的并聯(lián)技術(shù)顯得尤為重要。現(xiàn)場總線技術(shù)最早用于過程控制領域,現(xiàn)在已漸漸成為工業(yè)自動化領域的熱點,將現(xiàn)場總線技術(shù)應用在逆變電源系統(tǒng)上,無疑將更好地實現(xiàn)該系統(tǒng)的智能化。
1 逆變器并聯(lián)技術(shù)分析
多臺逆變器并聯(lián)運行時應滿足下列條件:各逆變器的交流輸出電壓要保證同頻、同相、同幅,否則就會在各逆變器之間引起環(huán)流,影響系統(tǒng)的穩(wěn)定運行,甚至造成嚴重的事故。下面以2臺逆變電源對同一負載供電為例進行分析,等效電路圖如圖1所示。
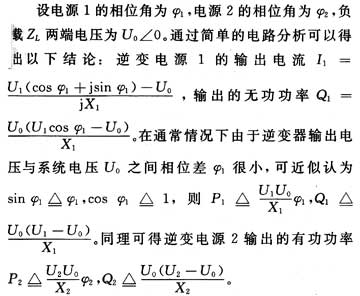
設X1=X2,則由上述公式可得出結(jié)論:在逆變電源系統(tǒng)中,各逆變單元的相位角之差將導致有功功率的差異,從而形成有功環(huán)流;各逆變單元輸出電壓的幅值差將導致無功功率的差異,從而形成無功環(huán)流。在相位同步的前提下,本文提出了一種利用現(xiàn)場CAN總線" title="CAN總線">CAN總線來實現(xiàn)逆變電源系統(tǒng)各逆變單元均流的方案。

2 現(xiàn)場CAN總線簡介
控制器局部網(wǎng)(Controller Area Network,CAN)是BOSCH公司為現(xiàn)代汽車應用領先推出的一種多主機局部網(wǎng),由于其卓越性能現(xiàn)已廣泛應用于工業(yè)自動化、多種控制設備、交通工具、醫(yī)療儀器以及建筑、環(huán)境控制等眾多部門。
CAN總線是一種多主總線,通信介質(zhì)可以是雙絞線、同軸電纜或光導纖維。通信速率可達1 MB/s。它的總線通信接口中集成了CAN協(xié)議的物理層和數(shù)據(jù)鏈路層功能,可完成對通信數(shù)據(jù)的成幀處理,包括位填充、數(shù)據(jù)塊編碼、循環(huán)冗余檢驗、優(yōu)先級判別等工作。CAN采用非破壞性仲裁技術(shù),當兩個節(jié)點同時向網(wǎng)絡上傳送信息時,優(yōu)先級低的節(jié)點主動停止數(shù)據(jù)發(fā)送,而優(yōu)先級高的節(jié)點可不受影響地繼續(xù)傳輸數(shù)據(jù),有效避免總線沖突。CAN節(jié)點在出現(xiàn)嚴重錯誤的情況下,具有自動關閉輸出的功能,切斷它與總線的聯(lián)系,以使總線上其他操作不受影響。
CAN通信協(xié)議的一個最大特點是廢除了傳統(tǒng)的站地址編碼,而代之以對通信數(shù)據(jù)塊進行編碼。采用這種方法的優(yōu)點是:可使網(wǎng)絡內(nèi)的節(jié)點個數(shù)在理論上不受限制,數(shù)據(jù)塊的標識碼可由11位或29位二進制數(shù)組成,因此可以定義211或229個不同的數(shù)據(jù)塊。這種按數(shù)據(jù)塊編碼的方式,還可使不同的節(jié)點同時接收到相同的數(shù)據(jù),這一點在分布式控制系統(tǒng)中非常有用。數(shù)據(jù)段長度最多為8個字節(jié),同時8個字節(jié)不會占用過長的總線時間,從而保證了通信的實時性。CAN協(xié)議采用CRC檢驗并可提供相應的錯誤處理功能,保證了數(shù)據(jù)通信的可靠性。
3 基于DSP2407A的CAN總線設計
TMS320LF2407A(DSP2407A)是美國TI公司推出的新型高性能16位定點數(shù)字信號處理器,它專門為數(shù)字控制設計,其集DSP的高速信號處理能力及適用于控制的優(yōu)化外圍電路于一體,在數(shù)字控制系統(tǒng)中得到廣泛應用。TMS320LF2407A系統(tǒng)組成包括:40 MHz,40 MIPS的低電壓3.3 V CPU、片內(nèi)存儲器、事件管理器模塊、片內(nèi)集成外圍設備。TMS320LF2407A包含2個專用于電機控制的事件管理器模塊EVA和EVB,每個事件管理器模塊包括通用定時器(GP)、全比較單元、正交編碼脈沖電路以及捕獲單元。TMS320LF2407A片上CAN控制器模塊是1個16位的外設模塊,該模塊完全支持CAN2.0 B協(xié)議,6個郵箱(其中0,1用于接收;4,5用于發(fā)送;2,3可配置為接收或發(fā)送)每次可以傳送0~8個字節(jié)的數(shù)據(jù),具有可編程的局部接收屏蔽、位傳輸速率、中斷方案和總線喚醒事件、超強的錯誤診斷、自動錯誤重發(fā)和遠程請求回應、支持自測試模式等功能,因此選擇該DSP芯片作為CAN總線的控制器。收發(fā)總線上的數(shù)據(jù)將由CAN控制器中的6個郵箱(mail-box)完成,通過設置每個郵箱中的屏蔽寄存器可以對來自總線上的數(shù)據(jù)進行篩選,丟棄一些無用的信息。利用CAN總線作為并聯(lián)逆變器系統(tǒng)的通訊總線,將每個逆變器的編號和輸出電流、電壓等信息在每個工頻周期中發(fā)送給位于總線上的其他逆變器,這樣每個逆變器都可以計算出自己的理論輸出電壓值,即所有逆變單元的平均電壓值。根據(jù)這個值與自身實際輸出電壓值的誤差,來調(diào)節(jié)各單元的輸出電壓值,最終實現(xiàn)并聯(lián)逆變電源的均流控制。
3.1 系統(tǒng)硬件結(jié)構(gòu)設計
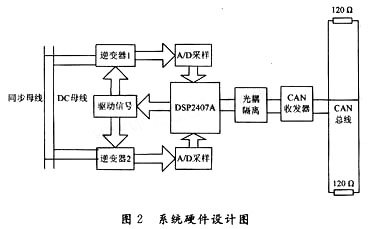
CAN總線收發(fā)器選用Microchip公司的MCP2551,MCP2551是一個可容錯的高速CAN器件,可作為CAN協(xié)議控制器和物理總線接口。MCP2551可為CAN協(xié)議控制器提供差分收發(fā)能力,它完全符合ISO-11898標準,包括能滿足24 V電壓要求。它的工作速率高達1 Mb/s。RS引腳可選擇3種操作模式:高速、斜率控制、待機。在本系統(tǒng)中為了通過限制CANH和CANL的上升下降時間來進一步減少EMI,選用斜率控制模式。系統(tǒng)硬件設計圖如圖2所示。
MCP2551引腳圖如圖3所示。
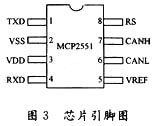
為了增強CAN總線節(jié)點的抗干擾能力,MCP2551與DSP 2407A的CAN控制器之間加一個光耦隔離6N137,這樣可以很好地實現(xiàn)CAN總線節(jié)點間的電氣隔離。
3.2 軟件設計
CAN節(jié)點通信的功能是將本節(jié)點的數(shù)據(jù)信息通過CAN總線以廣播形式傳給網(wǎng)絡上的其他節(jié)點,并且接受其他節(jié)點傳來的信息。因此軟件的設計可以分為3部分:系統(tǒng)的初始化、信息的定時發(fā)送和中斷接收。主程序在完成初始化后打開中斷,在TMS32LF2407A的數(shù)據(jù)采集中斷服務中對模塊的輸出電流進行采樣,在一個工頻周期結(jié)束后,計算逆變器的輸出電流值和對各模塊進行編號,通過定時發(fā)送程序,每隔2 ms就向CAN總線上發(fā)送1次,按照既定的均流算法,進入下個循環(huán)周期。在中斷接收程序中,存儲數(shù)據(jù)到接收緩沖區(qū),供主程序使用。
4 仿真實驗結(jié)果
在Matlab 6.5軟件平臺上對上述方案進行仿真。仿真參數(shù)如下:輸入電壓為DC48 V,輸入電流為14 A(220 VDC,3 kVA),單臺輸出電流為14 A,輸出頻率為50 Hz。逆變器采用電壓電流雙閉環(huán)控制,L=2.7 mH,C=4.5 μF,并機數(shù)量為2臺。其中電流環(huán)采用P調(diào)節(jié),電壓環(huán)采用P1調(diào)節(jié),設定P=5。仿真算法采用變步長的ode23tb,仿真時間為0.05 s,采樣時間為0.002 s。仿真結(jié)果如圖4、圖5所示。
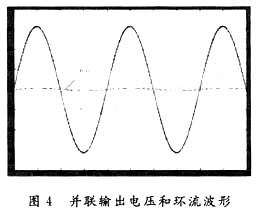

由圖4可看出,將CAN現(xiàn)場總線引入本系統(tǒng)中,可達到較好的均流效果。在圖5中,當實現(xiàn)并機時,兩臺逆變器輸出電流分別為6.8 A,6.9 A,可以很好地實現(xiàn)分擔負載的任務。
5 結(jié) 語
本文將現(xiàn)場CAN總線引用到并聯(lián)逆變電源系統(tǒng)中,較好地解決了并聯(lián)逆變電源普遍存在的環(huán)流問題,提高了系統(tǒng)的穩(wěn)定性和抗干擾性。同時真正實現(xiàn)(N+X)并聯(lián)冗余,可以在不斷開負載的情況下通過熱插拔增加或減少并機模塊,利用CAN總線的特點,使得整個系統(tǒng)不受影響。