
眾所周知,并聯(lián)技術(shù)已成為實(shí)現(xiàn)大功率分布式電源系統(tǒng)的核心技術(shù)[1],但由于各并聯(lián)電源模塊特性并不完全一致,輸出電壓高的模塊可能承擔(dān)更多負(fù)載,而有的模塊則可能輕載、甚至空載運(yùn)行,結(jié)果導(dǎo)致分擔(dān)電流多的模塊熱應(yīng)力大,降低了電源整體的工作可靠性。隨著電子系統(tǒng)的發(fā)展,對(duì)電源可靠性、效率和功率密度的要求越來越高,因此有必要采取一種有效的均流控制方案,保證整個(gè)電源系統(tǒng)的輸出電流按各個(gè)單元模塊的輸出能力均攤,這樣既能充分發(fā)揮單元電源模塊的輸出能力,又能保證每個(gè)單元電源的工作可靠性。
目前已有大量文獻(xiàn)介紹并聯(lián)電源系統(tǒng)的均流技術(shù),雖然其原理不盡相同,但控制器的設(shè)計(jì)都是在電源模塊簡化、近似的數(shù)學(xué)模型基礎(chǔ)上進(jìn)行。考慮到大功率器件及其電源模塊的非線性特性,基于古典反饋控制的均流措施不可能取得滿意的控制效果。隨著計(jì)算機(jī)技術(shù)的迅速發(fā)展,復(fù)雜參量和系統(tǒng)的狀態(tài)實(shí)時(shí)計(jì)算、估計(jì)已成為現(xiàn)實(shí),自適應(yīng)控制、滑模變結(jié)構(gòu)控制等現(xiàn)代控制理論以及模糊控制、神經(jīng)網(wǎng)絡(luò)等智能控制方法都已應(yīng)用于電力電子系統(tǒng)[2]。因此,在設(shè)計(jì)高精度、高穩(wěn)定性電源時(shí)使用先進(jìn)的控制策略論將更具吸引力和實(shí)用價(jià)值。本文將模糊控制與常規(guī)PID控制相結(jié)合,并采用
積分前饋控制,構(gòu)成智能均流控制器,試驗(yàn)波形表明電源系統(tǒng)的動(dòng)、靜態(tài)性能得到了顯著提高。
并聯(lián)DC/DC模塊的主-從均流法
工作原理
如圖1a所示,在主從控制方式下的N個(gè)模塊中#1模塊作為主模塊(master),工作在電壓源(VS)方式(圖1b),其余N-1個(gè)模塊作為從模塊(slave),工作在電流源(CS)方式(圖1c)。Vr1是主模塊的電流基準(zhǔn)值,作為PWM控制器的控制電壓;從模塊的PWM控制器由主模塊與從模塊輸出電流的偏差電壓即電流負(fù)反饋來調(diào)節(jié),CSC是均流控制器。由于從模塊電流均按主模塊電流進(jìn)行調(diào)節(jié),其輸出電流與主模塊電流基本一致,從而實(shí)現(xiàn)均流。因此,該系統(tǒng)實(shí)際上是一個(gè)由電壓外環(huán)和電流內(nèi)環(huán)構(gòu)成的雙閉環(huán)控制系統(tǒng)。
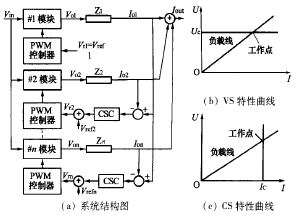
圖1 并聯(lián)電源模塊的主-從均流法工作原理圖
主要特點(diǎn)
雙閉環(huán)主-從均流控制技術(shù)主要有以下特點(diǎn):
(1)每個(gè)電源模塊的輸出電流能夠自動(dòng)按功率份額均攤,實(shí)現(xiàn)均流;
(2)當(dāng)輸入電壓或/和負(fù)載電流變化時(shí),能保持輸出電壓穩(wěn)定,并且均流瞬態(tài)響應(yīng)好;
(3)由于主從模塊間需要通訊聯(lián)系,所以整個(gè)系統(tǒng)較為復(fù)雜。
PID均流控制器(CSC)設(shè)計(jì)
雖然文獻(xiàn)[3]提出的PI均流控制器在DC/DC模塊電源并聯(lián)系統(tǒng)中獲得了較高的均流精度,但動(dòng)態(tài)性能尚無法 滿足電源在負(fù)載變化或電網(wǎng)波動(dòng)過程中的快速性要求。為改善動(dòng)態(tài)特性,在PI調(diào)節(jié)器的基礎(chǔ)上引入微分環(huán)節(jié),構(gòu)成PID控制器。這里以降壓型(BUCK)DC/DC電源模塊為例,進(jìn)行具體說明。模塊參數(shù):輸入電壓15V,輸出電壓5V,輸出電流15A。系統(tǒng)采用三模塊并聯(lián)的MSC拓?fù)洌娫纯傒敵鲭娏魇?5A。若均流控制器(CSC)采用圖2所示的PI控制器,選擇其帶寬BW=28kHz,相位裕量pM=48°,幅值裕量GM=15dB,則其傳遞函數(shù)及參數(shù):
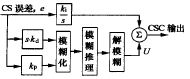
圖2 模糊均流控制器結(jié)構(gòu)圖
其中:
在PI控制器的基礎(chǔ)上引入微分環(huán)節(jié),增加低頻段零點(diǎn),從而在保證充分相位裕量的前提下,增加系統(tǒng)帶寬。為提高系統(tǒng)快速性,將PID調(diào)節(jié)器的帶寬由28kHz提高到100kHz,相位裕量不變,幅值裕量為無窮大,則PID控制器的傳遞函數(shù)為:

其中:kp=20,ki=1,kd=0.1,傳遞函數(shù)中包括Z1=0.05s-1、Z2=300×103s-1兩個(gè)零點(diǎn)和附加微分環(huán)節(jié)的高頻極點(diǎn)p=-ωp,ωp值由式(1)決定。值得注意的是,雖然電源系統(tǒng)的響應(yīng)速度有了顯著提高,但是帶寬的增加使系統(tǒng)抑制輸入信號(hào)高頻噪聲的能力大大下降。因此帶寬的選擇應(yīng)當(dāng)是在電源系統(tǒng)具體的應(yīng)用背景下具體分析,盡量在系統(tǒng)快速性和抗擾性之間取得平衡。 FUZZY-PID均流控制器設(shè)計(jì)
由于并聯(lián)電源系統(tǒng)的強(qiáng)耦合、非線性特性,其均流控制器的PID參數(shù)整定非常困難甚至根本無法整定,很難在工程上找到同時(shí)滿足穩(wěn)定性和動(dòng)態(tài)性能要求的解決方案。因此,借助于智能控制不依賴被控對(duì)象精確數(shù)學(xué)模型的特點(diǎn),本文介紹一種新型智能均流控制器設(shè)計(jì)方案,在PID調(diào)節(jié)器中引入模糊控制,在實(shí)現(xiàn)并聯(lián)模塊均流的同時(shí),進(jìn)一步提高系統(tǒng)的動(dòng)靜態(tài)性能指標(biāo)。
均流控制器結(jié)構(gòu)
基于FUZZY-PID控制的CSC結(jié)構(gòu)(圖2)采用二維模糊控制器結(jié)構(gòu),以均流誤差e和誤差變化e作為輸入量,u為輸出控制量。此時(shí),模糊控制器的控制量成為電流誤差和誤差變化的非線性函數(shù),它具有類似PD調(diào)節(jié)器的控制效果,系統(tǒng)動(dòng)態(tài)特性有所改善,而靜態(tài)性能并不令人滿意,系統(tǒng)無法完全消除穩(wěn)態(tài)誤差;再加之模糊控制固有的死區(qū)現(xiàn)象,使穩(wěn)態(tài)誤差進(jìn)一步擴(kuò)大。另外,在模糊變量分級(jí)不夠多的情況下,常常在平衡點(diǎn)附近有振蕩現(xiàn)象。為克服這些問題,系統(tǒng)又引入誤差信號(hào)的積分分離、前饋控制算法,以消除穩(wěn)態(tài)誤差。
模糊控制器設(shè)計(jì)
通常模糊控制規(guī)則由總結(jié)實(shí)際操作經(jīng)驗(yàn)而得來,但對(duì)于并聯(lián)電源系統(tǒng)這種特定對(duì)象,要總結(jié)人工控制經(jīng)驗(yàn)比較困難,因此本設(shè)計(jì)考慮將上述經(jīng)典PID控制策略模糊化,得到所需控制規(guī)則。
定義輸入量e和e的模糊集為:{負(fù)(N)、零(Z)、正(P)},控制量u的模糊集為{負(fù)大(NB)、負(fù)小(NS)、零(Z)、正小(PS)、正大(PB)},對(duì)應(yīng)隸屬函數(shù)均為三角型(圖3)。基于式(2)PID專家知識(shí)的模糊變量賦值按以下過程建立:因PID調(diào)節(jié)器的比例與微分系數(shù)之比kp/kd=200,若e的變化范圍是[-1,1],則可以確定e的變化范圍是[-200,200]。如果e是負(fù)(-1),且e也是負(fù)(-200),那么基于PID的模糊推理結(jié)果即控制量u約是-40,也就是說u值論域中的負(fù)大(NB)對(duì)應(yīng)于-40。依此類推,可獲得其余推理結(jié)果,模糊控制表如表1所示。

圖3 隸屬函數(shù)
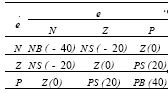
表1 模糊控制規(guī)則表
實(shí)驗(yàn)與結(jié)論
這里就三個(gè)BUCKDC/DC電源模塊并聯(lián)系統(tǒng)進(jìn)行仿真實(shí)驗(yàn)研究。圖4a和圖4b分別是70%負(fù)載條件下CSC采用PID調(diào)節(jié)器和FUZZY-PID調(diào)節(jié)器時(shí)系統(tǒng)的階躍響應(yīng)波形,從中可以看出:

圖4a 并聯(lián)電源系統(tǒng)階躍響應(yīng)圖
(1)基于FUZZY-PID均流調(diào)節(jié)器的電源系統(tǒng)中各模塊電流波形幾乎完全一致,而在PID調(diào)節(jié)作用下各模塊電流波形差別較大,這說明FUZZY-PID控制的穩(wěn)定性好,穩(wěn)態(tài)精度高,動(dòng)態(tài)響應(yīng)快且無超調(diào)。
系統(tǒng)主電路
逆變主電路為交-直-交電壓型,整流側(cè)為單相二極管不可控型。這種方式不僅控制簡單,而且系統(tǒng)具有較高的功率因數(shù)。為減小裝置體積,減少諧波,提高電流波形質(zhì)量。逆變功率元件采用高開關(guān)頻率的三菱電機(jī)公司第三代智能功率模塊PM20CSJ060。該模塊為六合一封裝,內(nèi)部為三相橋式電路結(jié)構(gòu),內(nèi)部集成了高速、低功耗的IGBT芯片及其驅(qū)動(dòng)、保護(hù)電路。此外,該模塊還集成了過熱和欠壓鎖定保護(hù)電路,使得系統(tǒng)的可靠性得到進(jìn)一步提高[4]。控制電路上的LF2407芯片輸出的六路空間矢量信號(hào)SVPWM經(jīng)光耦6N136實(shí)現(xiàn)對(duì)IPM隔離驅(qū)動(dòng),再將整流濾波后的直流電壓逆變?yōu)樗璧母哳l交流電驅(qū)動(dòng)永磁空調(diào)壓縮機(jī)。
系統(tǒng)中還有電流檢測電路,采用霍爾電流傳感器檢測永磁電機(jī)A、C兩相,再利用采樣電阻和多級(jí)運(yùn)放將電流信號(hào)處理為在0~5V間變化的模擬電壓信號(hào),與集成在LF2407內(nèi)的A/D轉(zhuǎn)換器外引腳相連接。由于無位置傳感器技術(shù)無法知道轉(zhuǎn)子的初始位置,永磁電機(jī)也只有在起動(dòng)后才能工作在無位置傳感器狀態(tài)下,所以用光電式旋轉(zhuǎn)編碼器來實(shí)現(xiàn)轉(zhuǎn)子初始位置的檢測。其它的保護(hù)電路由LF2407的事件管理器來實(shí)現(xiàn),一旦系統(tǒng)出現(xiàn)故障,片內(nèi)固化的中斷程序?qū)⒆詣?dòng)切斷系統(tǒng)的SVPWM輸出,直到故障消失和系統(tǒng)復(fù)位。
系統(tǒng)軟件設(shè)計(jì)
本文研究的永磁空調(diào)系統(tǒng)控制軟件全部由LF2407完成,主要是完成空間磁場定向控制,產(chǎn)生SVPWM信號(hào)。控制軟件包括初始化程序、主程序和中斷服務(wù)子程序三個(gè)部分。系統(tǒng)在每次復(fù)位后,首先執(zhí)行初始化程序,完成DSP內(nèi)部設(shè)定和初始狀態(tài)的檢測,然后開啟中斷,執(zhí)行主程序。一旦外部中斷條件滿足時(shí),系統(tǒng)執(zhí)行中斷服務(wù)子程序,直到系統(tǒng)重新復(fù)位。圖4b為SVPWM中斷服務(wù)子程序框圖。
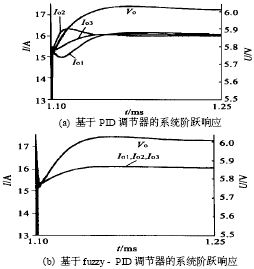
圖4b SVPWM中斷子程序流程圖
結(jié)論
本文根據(jù)永磁同步電動(dòng)機(jī)矢量控制原理和變頻空調(diào)器的要求,開發(fā)了一套基于DSP的全新變頻空調(diào)控制系統(tǒng)。利用LF2407的六個(gè)PWM全比較器產(chǎn)生的SVPWM控制信號(hào)就可以實(shí)現(xiàn)對(duì)永磁同步電動(dòng)機(jī)的變頻控制。該空調(diào)控制系統(tǒng)充分利用了LF2407的超強(qiáng)實(shí)時(shí)計(jì)算能力和一些集成器件,使整個(gè)系統(tǒng)結(jié)構(gòu)簡單、產(chǎn)品開發(fā)周期短、可靠性強(qiáng)。