
0 引言
脈沖" title="脈沖">脈沖" target="_blank">脈沖MIG(Metal Inert Gas)是一種熔化極惰性氣體保護(hù)焊。數(shù)字脈沖MIG焊機(jī)具有諸多優(yōu)點(diǎn),在制造工業(yè)中占有重要地位。研制弧焊逆變電源" title="電源">電源具有重要意義。
弧焊逆變電源自上世紀(jì)80年代問(wèn)世以來(lái),經(jīng)過(guò)不斷的發(fā)展完善,已成為焊接電源的主流產(chǎn)品。弧焊逆變電源的逆變頻率一般在20~100kHz,由于目前的逆變電源多采用模擬電路控制,限制了逆變電源性能的提高。焊機(jī)的數(shù)字化是當(dāng)今焊接裝備發(fā)展的潮流,它使得數(shù)字控制應(yīng)用于弧焊逆變電源成為可能。在國(guó)內(nèi),數(shù)字化焊機(jī)的研究尚處于起步階段,較之世界先進(jìn)水平仍有很大的差距。這使我們研究弧焊逆變電源有了很大的必要。
1 電源主電路設(shè)計(jì)
1.1 系統(tǒng)概述
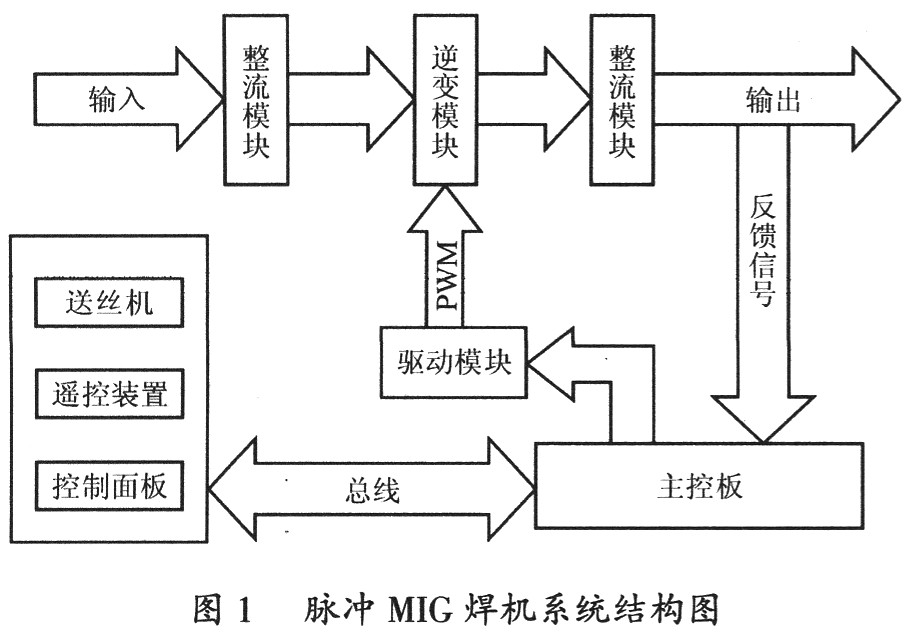
脈沖MIG焊是一種焊接電流周期性變化的熔化極惰性氣體保護(hù)焊,它對(duì)焊接設(shè)備要求較高。主電路的開關(guān)頻率要高,響應(yīng)速度要快,動(dòng)態(tài)響應(yīng)性能要好,輸出電流波紋要小,要能適應(yīng)多種焊接材料、多種焊絲直徑在不同條件下的焊接需求。如圖1所示,脈沖MIG焊機(jī)主要由6個(gè)部分組成。
1.1.1 主回路
主回路是系統(tǒng)的功率變換電路,其功能是將電網(wǎng)上的380V的三相交流電整流并進(jìn)行中頻橋式逆變,經(jīng)再次整流后輸出,輸出電流可達(dá)450~500A。
1.1.2 驅(qū)動(dòng)電路
驅(qū)動(dòng)電路具有保護(hù)功能,防止出現(xiàn)過(guò)流、過(guò)熱等情況。驅(qū)動(dòng)逆變回路中的絕緣柵型大功率晶體管(IGBT)對(duì)觸發(fā)脈沖要求嚴(yán)格,其開關(guān)損耗也與觸發(fā)脈沖的斜率、幅度等密切相關(guān)。
1.1.3 主控板電路
主控板電路是焊機(jī)控制的核心部分。在控制上使用了變參數(shù)電流閉環(huán)PI控制和電壓閉環(huán)PI控制。系統(tǒng)通過(guò)D/A變換送到驅(qū)動(dòng)板的模擬輸入口,經(jīng)驅(qū)動(dòng)IGBT輸出。控制的反饋量是最終輸出的電壓和電流的采樣值。
1.1.4 送絲機(jī)電路
送絲機(jī)通過(guò)調(diào)節(jié)送絲電機(jī)的轉(zhuǎn)速實(shí)現(xiàn)焊機(jī)焊接的勻速或變速送絲。送絲機(jī)電路通過(guò)控制電磁閥實(shí)現(xiàn)保護(hù)氣體的通斷。
1.1.5 焊機(jī)面板
焊機(jī)面板是焊機(jī)和用戶交互的接口。用戶可以通過(guò)面板來(lái)觀察和設(shè)置焊機(jī)的工作模式、焊機(jī)的狀態(tài)、焊絲和保護(hù)氣體的類型等。
1.1.6 遙控盒
當(dāng)用戶離焊機(jī)較遠(yuǎn)時(shí),可以通過(guò)遙控盒來(lái)代替控制面板的功能以實(shí)現(xiàn)遠(yuǎn)程控制。
1.2 主電路設(shè)計(jì)
系統(tǒng)的主電路的結(jié)構(gòu)如圖2所示,工作在軟開關(guān)方式,采用了改進(jìn)的移項(xiàng)諧振電路。
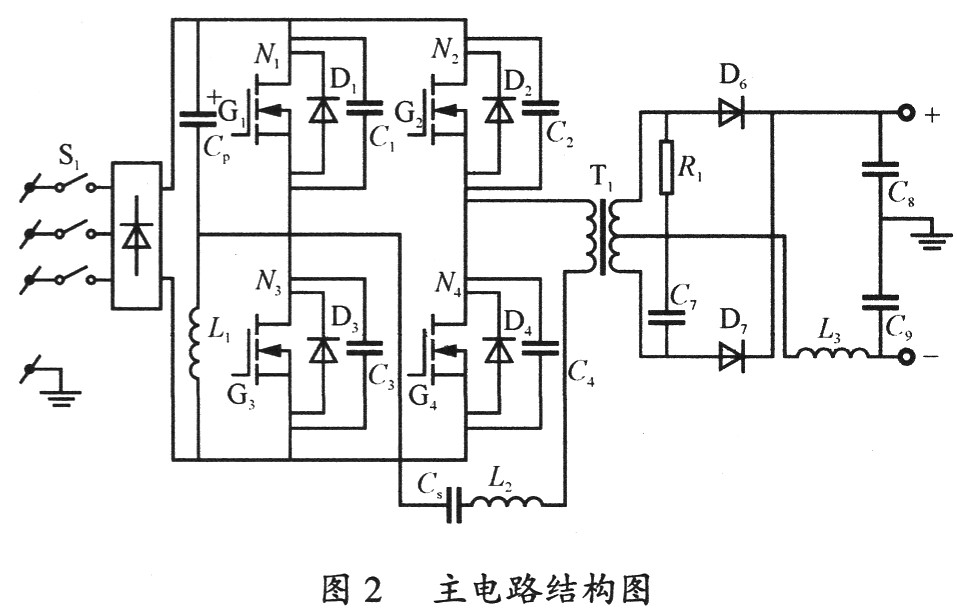
逆變部分N1、N3為超前橋臂,N2、N4為滯后橋臂。C1、C3為超前臂的并聯(lián)電容,C2、C4為滯后臂的并聯(lián)電容,且C1=C3>>C2=C4。L2為飽和電感,Cs為環(huán)流抑制串聯(lián)電容。T1為主變壓器。“+”、“-”為焊槍輸出。S1為空氣開關(guān),電網(wǎng)電壓經(jīng)整流和Cp、L1穩(wěn)壓后為逆變提供直流輸入。
2 電源控制系統(tǒng)設(shè)計(jì)
2.1 脈沖MIG弧焊電源控制系統(tǒng)總體方案
脈沖MIG弧焊控制系統(tǒng)的總體設(shè)計(jì)是系統(tǒng)設(shè)計(jì)的關(guān)鍵,它涉及到自動(dòng)控制、計(jì)算機(jī)及焊接等領(lǐng)域。
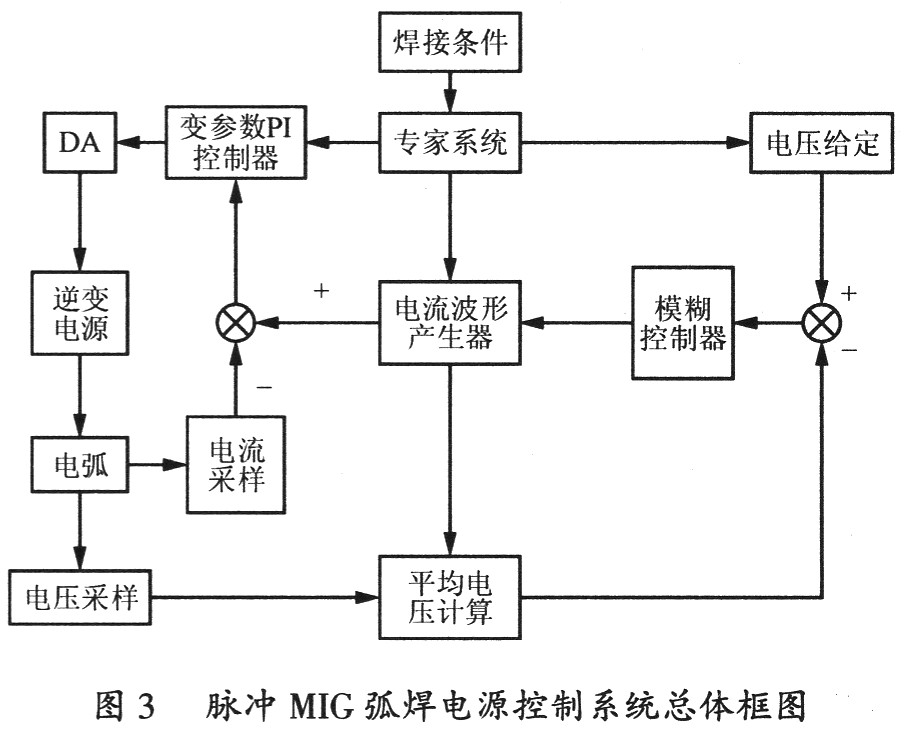
該電源控制系統(tǒng)的總體方案如圖3所示。脈沖MIG弧焊電源控制系統(tǒng)共有三個(gè)部分:電流波形控制系統(tǒng)、弧長(zhǎng)控制系統(tǒng)、專家系統(tǒng)。其中電流波形控制系統(tǒng)、弧長(zhǎng)控制系統(tǒng)為閉環(huán)控制系統(tǒng),且弧長(zhǎng)控制系統(tǒng)的輸出為電流波形控制系統(tǒng)的輸入,故整個(gè)系統(tǒng)為雙閉環(huán)控制系統(tǒng),電流波形控制為內(nèi)環(huán),弧長(zhǎng)控制為外環(huán)。專家系統(tǒng)為整個(gè)雙閉環(huán)系統(tǒng)的調(diào)節(jié)部分。
2.2 控制系統(tǒng)各部分方案設(shè)計(jì)
2.2.1 電流波形控制系統(tǒng)
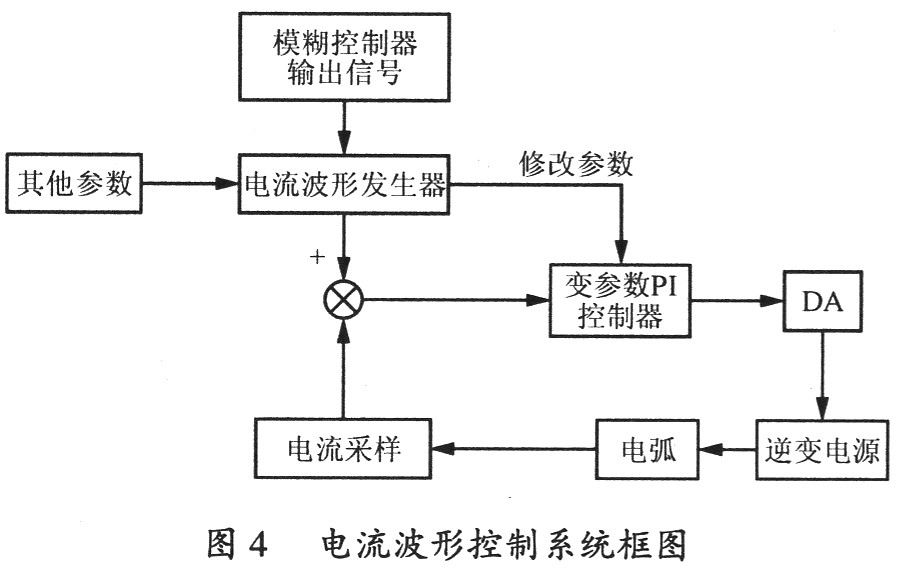
為了實(shí)現(xiàn)對(duì)電流波形控制的精確性,本系統(tǒng)應(yīng)當(dāng)采用PID控制。由于理想微分控制對(duì)于強(qiáng)擾動(dòng)反應(yīng)較快,而電弧的熱慣性使得系統(tǒng)不能及時(shí)地響應(yīng)微分控制。此外理想微分控制會(huì)使偏差信號(hào)e(t)中的噪聲干擾放大,產(chǎn)生較大的噪聲輸出,影響系統(tǒng)性能。故本系統(tǒng)采用了變參數(shù)的PI控制器。對(duì)于脈沖MIG焊而言,一脈一滴的過(guò)渡形式是所有過(guò)渡形式中焊接質(zhì)量中最好的,此時(shí)熔滴的大小與焊絲直徑相當(dāng),因此熔滴過(guò)渡較好的控制思想是控制波形的形狀,保證熔滴的大小一致。波形控制決定著單個(gè)熔滴的行為特性。在熔滴過(guò)渡的一個(gè)周期里,熔滴的過(guò)渡中可以分為6個(gè)階段,在這幾個(gè)階段中,分別采用不同的比例系數(shù)和積分時(shí)間,從而獲得較好的系統(tǒng)動(dòng)態(tài)響應(yīng)速度和基值電流時(shí)間的穩(wěn)態(tài)精度。電流波形控制系統(tǒng)的框圖如圖4所示。
2.2.2 弧長(zhǎng)控制系統(tǒng)
焊接電弧弧長(zhǎng)的穩(wěn)定性主要取決于兩個(gè)方面:一是電弧的自身調(diào)節(jié)作用;二是焊接參數(shù)及所選擇的工藝方法。傳統(tǒng)電弧控制方法由于其弧壓控制器的參數(shù)選擇要考慮兼顧整個(gè)送絲速度范圍,因此只能保證在某一區(qū)間弧長(zhǎng)控制效果最佳。另外希望弧長(zhǎng)調(diào)節(jié)過(guò)程能快速、穩(wěn)定地進(jìn)行。考慮到傳統(tǒng)PID控制的不足,且目前模糊控制已經(jīng)較為成熟,故本系統(tǒng)采用模糊控制器來(lái)進(jìn)行弧壓反饋部分的設(shè)計(jì)。
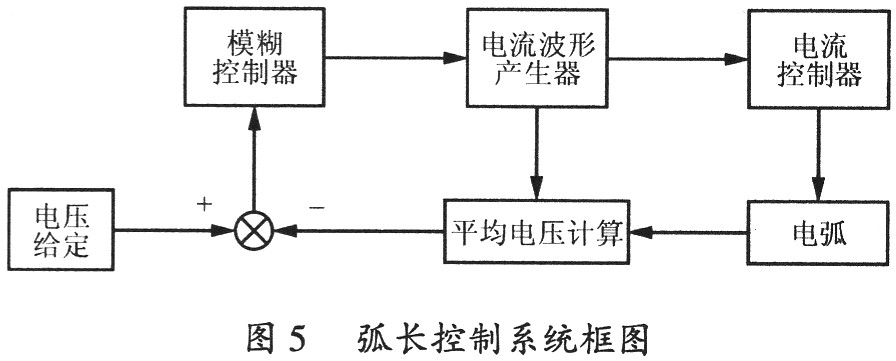
首先將每個(gè)脈沖以峰值為起點(diǎn),以100μs為采樣周期進(jìn)行采樣并計(jì)算平均電壓,并將得到的平均電壓與給定電壓值比較,從而得到電壓偏差與電壓偏差的變化率,然后根據(jù)焊工經(jīng)驗(yàn),設(shè)計(jì)模糊控制器,輸入量為電壓偏差和電壓偏差的變化率,經(jīng)過(guò)模糊推理和解模糊得到下一個(gè)脈沖的基值時(shí)間,將計(jì)算得到的基值時(shí)間送到電流波形控制部分以修改電流控制波形,從而調(diào)整熔化速度,使得脈沖的平均電壓與給定電壓相等。按此思想設(shè)計(jì)的弧長(zhǎng)控制系統(tǒng)的框圖如圖5所示。
2.2.3 專家控制系統(tǒng)
專家系統(tǒng)是一種模擬人類專家解決特定領(lǐng)域問(wèn)題的計(jì)算機(jī)程序系統(tǒng)。焊接專家系統(tǒng)內(nèi)部含有大量的焊接領(lǐng)域的專家水平的知識(shí)與經(jīng)驗(yàn),能按照焊接專家的知識(shí)解決焊接領(lǐng)域參數(shù)調(diào)整與配合問(wèn)題。焊接專家系統(tǒng)屬于分析型專家系統(tǒng),解決的是分類問(wèn)題。通常對(duì)分類問(wèn)題所進(jìn)行的操作是解釋操作。解釋操作主要是識(shí)別操作。焊接專家系統(tǒng)中要識(shí)別出工況,根據(jù)輸入從專家系統(tǒng)數(shù)據(jù)庫(kù)中獲得相應(yīng)的解,這個(gè)解可能不唯一,也可能是錯(cuò)誤的,經(jīng)過(guò)推理機(jī)對(duì)解進(jìn)行篩選,得到最優(yōu)的解。以下是具體的工作過(guò)程:
首先在焊機(jī)顯示面板上,由焊工選擇焊接條件,包括焊接材料、母材類型、母材牌號(hào)、母材厚度、焊絲直徑、保護(hù)氣體、送絲速度等。同時(shí)采取適當(dāng)?shù)拇胧┦沟孟嗷ブg有關(guān)聯(lián)的條件不出現(xiàn)矛盾,并對(duì)輸入的條件進(jìn)行合法性檢查。然后根據(jù)所選的焊接條件由專家系統(tǒng)經(jīng)過(guò)推理確定電流控制波形的參數(shù)。最后確定電弧控制部分的給定電壓。同時(shí)為了實(shí)現(xiàn)保存焊接規(guī)范,設(shè)計(jì)了知識(shí)獲取機(jī)。
專家系統(tǒng)框圖如圖6所示。

3 系統(tǒng)軟件設(shè)計(jì)
脈沖MIG逆變焊機(jī)是一個(gè)復(fù)雜的多處理器系統(tǒng)。其軟件設(shè)計(jì)包括主控板上MC56F8523 DSC" title="DSC">DSC的程序設(shè)計(jì)、主控板MC9S12DP256單片機(jī)的焊接專家系統(tǒng)程序設(shè)計(jì)、送絲機(jī)上MC9S08GT60單片機(jī)的軟件設(shè)計(jì)、面板以及遙控盒上AT89C51單片機(jī)的軟件設(shè)計(jì)。
每個(gè)子系統(tǒng)的軟件都實(shí)現(xiàn)焊機(jī)的部分功能,各個(gè)子系統(tǒng)之間通過(guò)RS-485總線進(jìn)行通訊,由MC9S12DP256進(jìn)行調(diào)度。主控板上的DSC主要完成焊接過(guò)程的控制,包括電流閉環(huán)盒電壓閉環(huán)的控制。該系統(tǒng)軟件采用模塊化設(shè)計(jì),使得程序結(jié)構(gòu)清晰,便于系統(tǒng)結(jié)構(gòu)擴(kuò)展。
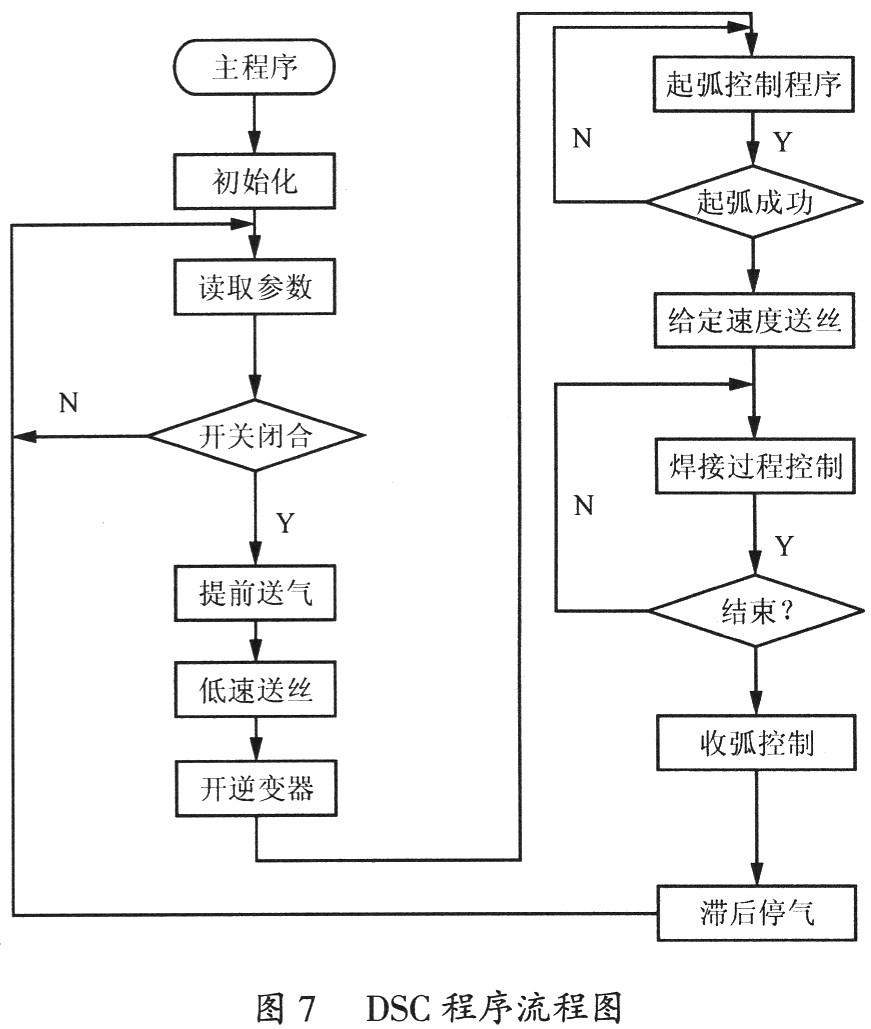
本文給出焊接控制程序設(shè)計(jì)。該部分程序?yàn)橄到y(tǒng)的主要部分,直接控制焊機(jī)的動(dòng)作。程序流程圖如圖7所示。
4 結(jié)語(yǔ)
本文較系統(tǒng)地介紹了基于DSC+MCU的MIG弧焊電源控制系統(tǒng)的設(shè)計(jì),并提出了模糊控制在DSC上的實(shí)現(xiàn)。實(shí)踐證明,該系統(tǒng)工作穩(wěn)定,有很好的性能指標(biāo),完成了設(shè)計(jì)系統(tǒng)的要求。