
如今越來越多的電器" title="電器">電器制造商采用變速永磁(PM)同步電機(jī)" title="電機(jī)">電機(jī)來提高能效、增加產(chǎn)品特性。工業(yè)驅(qū)動(dòng)器制造商很早就認(rèn)識(shí)到PM電機(jī)具有高能效和高功率重量比,但控制電子技術(shù)的最新進(jìn)展才使得PM電機(jī)被電器制造商廣泛采納。
只需采用直流環(huán)節(jié)電流反饋技術(shù)的定向控制(FOC)可最小化系統(tǒng)成本,對(duì)電器驅(qū)動(dòng)器應(yīng)用非常有吸引力。電機(jī)的正弦控制可產(chǎn)生平滑的扭矩輸出,輸出的聲學(xué)噪聲很低。因此,F(xiàn)OC適合用在風(fēng)扇、水泵、洗衣機(jī)和干衣機(jī)等低噪聲和高能效非常重要的設(shè)備中。
空調(diào)和洗衣干衣機(jī)等許多電器設(shè)備必須獨(dú)立控制兩個(gè)電機(jī)的速度,以優(yōu)化它們的性能。這些系統(tǒng)所采用的傳統(tǒng)方法是使用帶串行通信鏈路的電機(jī)控制處理器來實(shí)現(xiàn)同步。但是,如果用一個(gè)器件控制兩個(gè)電機(jī),就可以大大簡(jiǎn)化硬件和系統(tǒng)設(shè)計(jì)。最近推出的電器控制平臺(tái)可僅利用直流母線電流反饋技術(shù)同時(shí)控制兩個(gè)PM交流電機(jī),該芯片采用嵌入式FOC算法,可縮短開發(fā)時(shí)間,并推動(dòng)電器制造商快速采納這種技術(shù)。
無(wú)傳感器" title="傳感器">傳感器電機(jī)控制算法的實(shí)現(xiàn)
FOC在工業(yè)驅(qū)動(dòng)系統(tǒng)中很常見,它一般采用編碼器或分解器測(cè)量轉(zhuǎn)子的位置。閉環(huán)電流控制算法利用轉(zhuǎn)子的角坐標(biāo)校正電機(jī)電流和轉(zhuǎn)子磁通,從而實(shí)現(xiàn)扭矩輸出的最大化。電器控制系統(tǒng)中先進(jìn)的轉(zhuǎn)子位置估算算法無(wú)需使用高分辨率位置傳感器(圖1)。
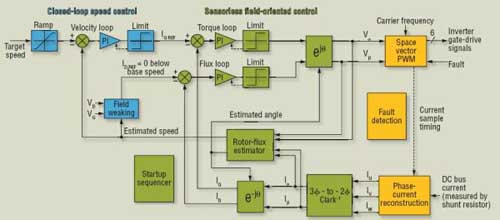
圖1:定向控制(FOC)系統(tǒng)通過使用直流環(huán)節(jié)電流反饋技術(shù)消除了對(duì)位置傳感器的需求
估算算法根據(jù)采用繞組電壓和電流的電機(jī)模型,獲得PM的轉(zhuǎn)子磁通位置。這種方法非常合適,因?yàn)檗D(zhuǎn)子上的磁體決定了轉(zhuǎn)子磁通的位置。繞組電流測(cè)量數(shù)據(jù)是利用基于功率變換器的狀態(tài)知識(shí)的正確的ADC采樣時(shí)序,從直流環(huán)節(jié)電流中獲得的。系統(tǒng)框圖表明,繞組電流測(cè)量數(shù)據(jù)和繞組電壓驅(qū)動(dòng)值是計(jì)算轉(zhuǎn)子角位置和角速度的轉(zhuǎn)子磁通模型的輸入。扭矩和磁通控制環(huán)路不僅能在較低速度范圍內(nèi)實(shí)現(xiàn)最大的扭矩輸出,還可以實(shí)現(xiàn)弱磁下的高速操作。
在第一代FOC電機(jī)驅(qū)動(dòng)系統(tǒng)中,這些功能是由模擬和數(shù)字器件的組合電路實(shí)現(xiàn)的。如今,這些電機(jī)驅(qū)動(dòng)系統(tǒng)中的大部分已采用高速DSP或RISC處理器在單個(gè)器件上實(shí)現(xiàn)相關(guān)算法。軟件實(shí)現(xiàn)不僅帶來了靈活和硬件簡(jiǎn)單的優(yōu)點(diǎn),也給驅(qū)動(dòng)系統(tǒng)開發(fā)人員帶來重要的軟件開發(fā)任務(wù)。生成控制算法的軟件代碼需要許多步驟。第一步,系統(tǒng)工程師將控制原理圖轉(zhuǎn)換成代表各種控制功能的微分方程組。第二步,軟件工程師將這些微分方程轉(zhuǎn)換成代表處理器執(zhí)行指令的C代碼。這個(gè)過程出錯(cuò),從而延長(zhǎng)開發(fā)時(shí)間,除非代碼具有很好的結(jié)構(gòu)和文檔,并有長(zhǎng)期軟件維護(hù)小組。RISC處理器和DSP供應(yīng)商可以提供一整套FOC軟件實(shí)例來幫助電機(jī)驅(qū)動(dòng)公司加快開發(fā)進(jìn)程。這是很有可能的,因?yàn)镕OC控制技術(shù)非常成熟,所以算法結(jié)構(gòu)也可以定義得非常完善。然而,軟件實(shí)現(xiàn)在目前是沒有特別優(yōu)勢(shì)的,因?yàn)樗惴ńY(jié)構(gòu)的靈活性不是必需的。
控制系統(tǒng)設(shè)計(jì)工程師可以利用數(shù)字ASIC或FPGA技術(shù),以硬件方式實(shí)現(xiàn)FOC算法。開發(fā)過程的第一步與軟件方法沒太大區(qū)別,但在第二步中不再使用C代碼,而是由硬件工程師將微分方程轉(zhuǎn)換成代表邏輯門互連的Verilog代碼。這種設(shè)計(jì)可以在控制寄存器中定義并存儲(chǔ)控制參數(shù),以提供靈活性,但在數(shù)字ASIC中實(shí)現(xiàn)算法結(jié)構(gòu)的硬連線。這種方法在要求高速處理的電信系統(tǒng)中非常普遍,許多電機(jī)控制ASIC可以實(shí)現(xiàn)FOC和其它電機(jī)控制功能。這種方法的優(yōu)點(diǎn)不僅在于執(zhí)行速度,還在于它能顯著縮短系統(tǒng)的開發(fā)時(shí)間。
運(yùn)動(dòng)控制引擎(MCE)則提供另一種方法,該方法兼有專用ASIC硬件的高速性能和可編程處理器的靈活性。這種方法特別有效,因?yàn)镕OC算法使用了許多標(biāo)準(zhǔn)函數(shù),比如誤差放大器、比例積分(PI)補(bǔ)償器,以及會(huì)多次出現(xiàn)在控制電路中的矢量旋轉(zhuǎn)器。MCE由硬件電機(jī)控制函數(shù)庫(kù)組成,通過將輸入和輸出存儲(chǔ)器地址分配給相應(yīng)的系統(tǒng)變量,可高效地實(shí)現(xiàn)運(yùn)動(dòng)控制定序器與這些函數(shù)的互連。
控制系統(tǒng)工程師不需要將控制原理圖轉(zhuǎn)換成微分方程組,因?yàn)樵贛CE庫(kù)中具有經(jīng)過充分優(yōu)化的ASIC實(shí)現(xiàn)。相反,控制系統(tǒng)工程師采用原理圖編輯工具,以圖形化的方式通過互連運(yùn)動(dòng)控制庫(kù)中的標(biāo)準(zhǔn)函數(shù)來確定控制原理圖。圖形化編譯器將控制原理圖轉(zhuǎn)換成用于互連硬件控制函數(shù)的MCE定序器命令。編譯器將MCE的共享RAM區(qū)中的各個(gè)地址,分配給控制節(jié)點(diǎn)定義的每個(gè)算法變量。MCE定序器命令定義每個(gè)控制函數(shù)塊以及輸入輸出變量的存儲(chǔ)器地址。因?yàn)镸CE將這些命令存儲(chǔ)在存儲(chǔ)器中,所以具有與RISC處理器和DSP一樣的靈活性。
PWM開關(guān)頻率設(shè)置算法執(zhí)行的時(shí)序、ADC采樣率和輸出電壓的更新速率。MCE庫(kù)元件代表空間矢量調(diào)制器和ADC輸入,但它們?cè)诳刂圃韴D中只出現(xiàn)一次,因?yàn)樗鼈兣c物理的輸入輸出引腳相對(duì)應(yīng)。另一方面,矢量旋轉(zhuǎn)器或PI補(bǔ)償器等MCE庫(kù)控制函數(shù)可以多次出現(xiàn)在控制算法中,因?yàn)镸CE將它們的輸入輸出存儲(chǔ)在數(shù)據(jù)存儲(chǔ)器中。庫(kù)函數(shù)的每次實(shí)例化都會(huì)占用數(shù)據(jù)存儲(chǔ)器空間來存儲(chǔ)變量和MCE指令,因此存儲(chǔ)器容量限制了算法的復(fù)雜性。每個(gè)庫(kù)函數(shù)在每次執(zhí)行時(shí)都會(huì)占用一定的系統(tǒng)時(shí)鐘周期,因此控制環(huán)路總的時(shí)鐘周期數(shù)必須小于PWM周期中的時(shí)鐘周期數(shù)。
轉(zhuǎn)子角度估算器和電流控制環(huán)路大約要消耗1,400個(gè)系統(tǒng)時(shí)鐘周期,相當(dāng)于128MHz最大系統(tǒng)時(shí)鐘頻率下的11μs時(shí)間。這樣,在相當(dāng)于20kHz開關(guān)頻率的50μs PWM周期下,可以同時(shí)實(shí)現(xiàn)對(duì)兩個(gè)電機(jī)的控制。當(dāng)然,為控制兩個(gè)電機(jī),芯片需要兩套空間矢量PWM調(diào)制器和用于電流采樣的額外模擬輸入端。圖2是一個(gè)雙電機(jī)控制IC的結(jié)構(gòu)圖,它包含嵌入式運(yùn)動(dòng)控制引擎和用于執(zhí)行應(yīng)用層代碼的8位微控制器內(nèi)核。這種方法的優(yōu)勢(shì)是它能將在微控制器上執(zhí)行的慢速系統(tǒng)級(jí)功能與MCE執(zhí)行的高速電機(jī)控制算法分隔開來。
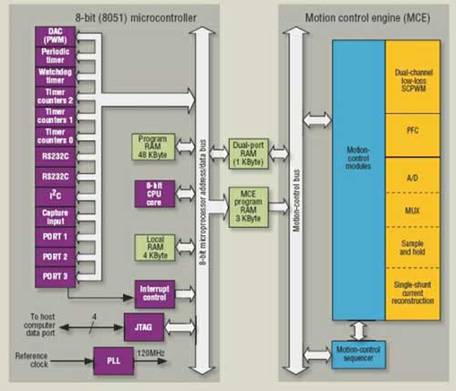
圖2:包含用來執(zhí)行應(yīng)用層任務(wù)的8位微控制器的雙電機(jī)控制芯片
MCE庫(kù)函數(shù)
高速執(zhí)行控制算法的關(guān)鍵是MCE庫(kù)函數(shù)在ASIC中的實(shí)現(xiàn)效率。兩個(gè)重要的反饋控制單元(PI控制補(bǔ)償器和矢量旋轉(zhuǎn)塊)可以作為庫(kù)函數(shù)的典型例子。ASIC實(shí)現(xiàn)需要優(yōu)化硅片和時(shí)鐘周期的使用,并同時(shí)不犧牲魯棒性和可靠性。
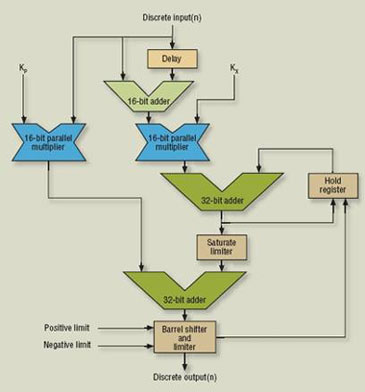
圖3:比例積分(PI)控制補(bǔ)償器可高效地使用MCE硬件資源和時(shí)鐘周期