
摘 要: 提出了一種新的基于多片TMS320C6414 DSP的EMIF與HPI接口互聯(lián)" title="互聯(lián)">互聯(lián)并與McBSP接口互聯(lián)構(gòu)成松耦合級(jí)聯(lián)的多" title="的多">的多DSP并行流水處理平臺(tái)。通過與大規(guī)模的可編程邏輯器件FPGA的配合使用,設(shè)計(jì)實(shí)現(xiàn)了一套具有高實(shí)時(shí)性" title="實(shí)時(shí)性">實(shí)時(shí)性、良好的擴(kuò)展性和多擴(kuò)展接口等特點(diǎn)的多DSP實(shí)時(shí)紅外目標(biāo)" title="紅外目標(biāo)">紅外目標(biāo)跟蹤系統(tǒng)。
關(guān)鍵詞: TMS320C6414 外部存儲(chǔ)器接口 主機(jī)接口 多通道緩沖串行口 多DSP 目標(biāo)跟蹤
隨著信號(hào)處理技術(shù)的發(fā)展,各種信號(hào)處理算法的復(fù)雜性和計(jì)算量飛速增長(zhǎng),同時(shí)對(duì)整個(gè)處理系統(tǒng)的實(shí)時(shí)性要求也大大提高。在紅外和雷達(dá)目標(biāo)跟蹤領(lǐng)域,雖然不斷出現(xiàn)各種優(yōu)化后的算法,但其運(yùn)算量仍然非常驚人,這使傳統(tǒng)的由單DSP構(gòu)成的處理系統(tǒng)難以負(fù)荷,因而對(duì)復(fù)雜的信號(hào)處理算法進(jìn)行分塊并在硬件系統(tǒng)上采取多DSP并行處理的方法勢(shì)在必行。
TMS320C64x是TI公司C6000平臺(tái)上具有最高性能的定點(diǎn)DSP,具有第二代的超長(zhǎng)指令字(VLIW)結(jié)構(gòu)。其內(nèi)部有8個(gè)相互獨(dú)立的功能單元,擁有二級(jí)程序和數(shù)據(jù)緩存。對(duì)于最新的C64x,其最高工作頻率為1GHz,具有8000MIPS的運(yùn)算能力。此外,C64x具有豐富的外設(shè)資源:16/64位的外部存儲(chǔ)器接口EMIFA/EMIFB,16/32位的HPI接口,3個(gè)多通道緩沖串行口(McBSP)等。
本文提出了一種以多片TMS320C6414 DSP為信號(hào)處理單元,采用EMIF與HPI接口互聯(lián)并與McBSP接口互聯(lián)構(gòu)成了松耦合級(jí)聯(lián)的多DSP并行流水處理平臺(tái),通過與大規(guī)模可編程邏輯器件FPGA的配合使用,設(shè)計(jì)實(shí)現(xiàn)了一套具有高實(shí)時(shí)性、良好的擴(kuò)展性和多擴(kuò)展接口等特點(diǎn)的多DSP紅外目標(biāo)跟蹤系統(tǒng)。
1 系統(tǒng)結(jié)構(gòu)設(shè)計(jì)與實(shí)現(xiàn)
紅外目標(biāo)跟蹤系統(tǒng)主要由預(yù)處理模塊" title="處理模塊">處理模塊、圖像處理模塊和圖像輸出模塊構(gòu)成。此外,系統(tǒng)還需要通過擴(kuò)展的多路422/485串行接口與其他系統(tǒng)實(shí)時(shí)通信及人機(jī)交互,因此在硬件設(shè)計(jì)上要兼顧處理實(shí)時(shí)性和接口靈活性。
在硬件結(jié)構(gòu)上,為了減少體積以利于便攜式應(yīng)用,系統(tǒng)采用多塊大小相同的電路板(70mm×70mm)的松耦合級(jí)聯(lián)的拓?fù)浣Y(jié)構(gòu);在板間連接上,系統(tǒng)采用多塊電路板疊加的塔式結(jié)構(gòu)。這樣,在每塊板上都利用DSP或FPGA構(gòu)成最小硬件系統(tǒng),上級(jí)模塊可以通過訪問下級(jí)模塊的HPI口或內(nèi)部地址映射空間進(jìn)行數(shù)據(jù)通信,從而減少模塊間的耦合且使各自的功能獨(dú)立開。系統(tǒng)組成結(jié)構(gòu)如圖1所示。
預(yù)處理模塊針對(duì)由熱像儀輸入的數(shù)字圖像信號(hào),采取了FPGA加兩片SDRAM乒乓工作的結(jié)構(gòu)對(duì)圖像進(jìn)行濾波,以抑制圖像的背景和噪聲,然后通過訪問DSP的HPI接口將數(shù)據(jù)存放在DSP處理模塊1的本地SDRAM。
圖像處理模塊是整個(gè)紅外目標(biāo)跟蹤系統(tǒng)的核心,它主要負(fù)責(zé)在各種工作模式和方式下的目標(biāo)檢測(cè)、跟蹤及人機(jī)交互。當(dāng)收到預(yù)處理模塊處理完畢中斷信號(hào),DSP處理模塊1開始進(jìn)行目標(biāo)檢測(cè)、識(shí)別等算法處理,并將處理后的數(shù)據(jù)通過本地EMIFB口和DSP處理模塊2的HPI口送到DSP處理模塊2的SDRAM,再由DSP2完成目標(biāo)跟蹤等剩余算法處理,最終將處理完的結(jié)果輸出給圖像輸出模塊顯示。整個(gè)過程中,當(dāng)本級(jí)模塊在處理當(dāng)前幀圖像數(shù)據(jù)時(shí),上級(jí)模塊可以同時(shí)進(jìn)行下一幀圖像數(shù)據(jù)的處理,這樣整個(gè)系統(tǒng)就可以實(shí)現(xiàn)并行流水處理,從而達(dá)到系統(tǒng)的最佳性能。
在每一級(jí)算法處理結(jié)束后,可以通過擴(kuò)展后的422/485接口將定位或跟蹤結(jié)果送出,也可以接收更新的工作參數(shù)和狀態(tài)命令字等內(nèi)容。而DSP處理模塊1與DSP處理模塊2之間還可以通過互聯(lián)的McBSP口同步系統(tǒng)參數(shù)和共享數(shù)據(jù)結(jié)果。
圖像輸出模塊采用了與預(yù)處理模塊相同的乒乓結(jié)構(gòu)以保證視頻信號(hào)的實(shí)時(shí)輸出。區(qū)別在于加入了PAL制模擬視頻信號(hào)輸出芯片。
如圖1,兩個(gè)DSP處理模塊是完全相同的基于C6414構(gòu)成的處理模塊。這是因?yàn)镃6414豐富的外設(shè)資源使得處理模塊的接口非常靈活,既可以通過HPI接口通信,也可以利用高速的McBSP接口通信,這非常有利于系統(tǒng)的擴(kuò)展。假定系統(tǒng)當(dāng)前的算法需要添加一個(gè)新的處理模塊,只需要再插入一個(gè)新的相同的DSP處理模塊即可,依次類推,系統(tǒng)最終可擴(kuò)展為如圖2所示的結(jié)構(gòu)。
可以看出,每個(gè)模塊都利用了SDRAM對(duì)圖像幀進(jìn)行緩存,以保證足夠的存儲(chǔ)空間和運(yùn)行速度,并且在各模塊間充分利用了并行流水的硬件設(shè)計(jì)特點(diǎn),從而使整個(gè)系統(tǒng)的運(yùn)行速度得以提高。

?

2 系統(tǒng)工作流程及算法實(shí)現(xiàn)
本系統(tǒng)主要用于對(duì)紅外目標(biāo)的搜尋、檢測(cè)和跟蹤,可以實(shí)時(shí)地從熱像儀讀入并行的數(shù)字圖像信號(hào),對(duì)圖像進(jìn)行實(shí)時(shí)處理以檢測(cè)和跟蹤目標(biāo),并將目標(biāo)的位置和運(yùn)動(dòng)信息輸出。此外,系統(tǒng)還可以通過多路422/485串行接口進(jìn)行實(shí)時(shí)通信和人機(jī)交互,如根據(jù)需要配置工作參數(shù)和狀態(tài)命令等。基于以上要求的系統(tǒng)軟件工作流程如圖3所示。
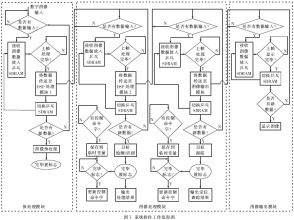
(1)預(yù)處理模塊
預(yù)處理模塊首先基于式(1)去除圖像背景起伏的干擾,G(x,y)為圖像處理后灰度結(jié)果,F(xiàn)(x,y)為處理前灰度值,F(xiàn)mean為圖像均值;再將處理結(jié)果通過一個(gè)5×5的高通卷積模板H構(gòu)成的高通濾波器完成預(yù)處理算法。
(2)圖像處理模塊
為完成目標(biāo)的檢測(cè)識(shí)別,圖像處理模塊需要進(jìn)行圖像分割以進(jìn)一步得到目標(biāo)信息。系統(tǒng)采取了基于式(3)的閾值進(jìn)行自適應(yīng)閾值分割。其中,v為分割閾值,F(xiàn)mean為圖像均值,μ為常數(shù),σ為圖像的均方差。這種方法在DSP中實(shí)現(xiàn)簡(jiǎn)單,可有效提取目標(biāo)信息。
v=Fmean+μ·σ?????????????????????????????????? (3)
目標(biāo)跟蹤首先針對(duì)目標(biāo)質(zhì)心提取模板,采用序貫相似性檢測(cè)算法(SSDA)對(duì)當(dāng)前幀圖像進(jìn)行匹配并計(jì)算相關(guān)置信度。當(dāng)置信度較高時(shí)根據(jù)匹配點(diǎn)更新模板并擬合目標(biāo)運(yùn)動(dòng)曲線,以此推算下幀圖像相關(guān)匹配的初始搜索位置。
3 試驗(yàn)結(jié)果
試驗(yàn)中采用的輸入圖像信號(hào)來自熱像儀,格式為14位的數(shù)字圖像信號(hào),分辨率為320×240/幀,逐行掃描,像素時(shí)鐘為12MHz/16MHz,跟蹤狀態(tài)下的幀周期為20ms,垂直搜索狀態(tài)下的幀周期為60ms,搜索狀態(tài)下(邊掃邊跟狀態(tài)下)每86ms(91ms)連續(xù)輸出4幀圖像信號(hào),每幀間隔7.74ms(9.34ms)。圖4給出了試驗(yàn)狀態(tài)時(shí)目標(biāo)檢測(cè)識(shí)別后的結(jié)果。
本文采用多片TMS320C6414 DSP及FPGA互聯(lián)構(gòu)成松耦合級(jí)聯(lián)的多DSP并行實(shí)時(shí)紅外目標(biāo)跟蹤系統(tǒng)。系統(tǒng)具有良好的實(shí)時(shí)性、擴(kuò)展性及適用性,配合目標(biāo)檢測(cè)跟蹤算法,可以從背景中有效提取目標(biāo)。
參考文獻(xiàn)
1 Texas Instrument.TMS320C6414/6415/6416 Datasheet.2005,2
2 任驪平,陳王騫.多DSP系統(tǒng)互連方案分析.電子技術(shù)應(yīng)用,2002;28(4)
3 董 靜,覃喜慶.一種復(fù)雜背景下紅外目標(biāo)提取的實(shí)時(shí)性算法.光學(xué)與光電技術(shù),2005;(4)
4 張 弘,趙保軍.一種快速實(shí)時(shí)的低信噪比紅外點(diǎn)、斑點(diǎn)目標(biāo)檢測(cè)方法.北京理工大學(xué)學(xué)報(bào),2001;(3)
5 Pal N R,Pal S K.A Review on Image Segmentation Tech-niques[J].Pattern Recognition,1993;26(9)
6 Barnea D I,Silverman H E.A class of algorithm for fast dig-ital image registration[J].IEEE Trans.Computers,F(xiàn)ebruary 1972,C221
7 秦 暄,章毓晉.一種基于曲線擬合預(yù)測(cè)的紅外目標(biāo)的跟蹤算法.紅外技術(shù),2003;(4)