
1 引言
我國(guó)西北地區(qū)國(guó)土面積遼闊,太陽(yáng)能和風(fēng)能資源非常豐富,其中太陽(yáng)能年均輻射強(qiáng)度為6000~8400MJ/m2,年均太陽(yáng)能光照時(shí)間為3000~3200h;風(fēng)力平均為5~6級(jí)。西北邊遠(yuǎn)地區(qū)經(jīng)濟(jì)不發(fā)達(dá),且住戶非常分散,若為這些用戶提供市電,則成本太高,因而,如何合理利用現(xiàn)有的資源——太陽(yáng)能和風(fēng)能就成為解決這些問題的有效途徑。
2 風(fēng)、光互補(bǔ)型戶用電源系統(tǒng)
系統(tǒng)的結(jié)構(gòu)框圖如圖1所示。
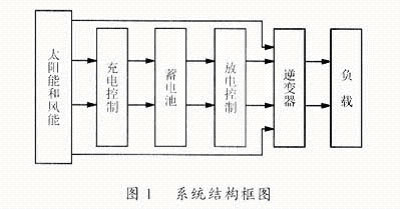
本系統(tǒng)既可以利用太陽(yáng)能和風(fēng)能對(duì)蓄電池充電,將自然能轉(zhuǎn)化為化學(xué)能儲(chǔ)藏在蓄電池中,然后再將化學(xué)能逆變成220V交流電供給用戶使用;又可以直接將太陽(yáng)能和風(fēng)能逆變?yōu)?20V交流電供給用戶使用。
3 系統(tǒng)的硬件電路
本系統(tǒng)的硬件電路主要包括主電路、隔離與驅(qū)動(dòng)電路和控制電路等。
3.1 主電路
主電路的拓?fù)浣Y(jié)構(gòu)如圖2所示。由圖2可知主電路主要包括蓄電池的過充保護(hù)電路和逆變電路。圖中uFP表示經(jīng)過整流后的風(fēng)機(jī)輸出電壓,uSP表示太陽(yáng)電池輸出電壓,K為電磁繼電器,GB為額定電壓24V的蓄電池組。

3.1.1 過充保護(hù)電路的工作原理
當(dāng)蓄電池的電壓過高時(shí),A點(diǎn)電壓就會(huì)大于TL431的基準(zhǔn)電壓值Uref(=2.5V)從而使TL431導(dǎo)通,B點(diǎn)被鉗為低電平,V1截止,C點(diǎn)為高電平,V3導(dǎo)通,V2截止,D點(diǎn)為高電平,此時(shí)VT14和VT15均導(dǎo)通,繼電器K動(dòng)作。根據(jù)太陽(yáng)能電池和風(fēng)機(jī)的特性,太陽(yáng)能電池的輸出電壓被直接短路,風(fēng)機(jī)的輸出電壓通過大功率卸載電阻R9卸放掉;相反,當(dāng)蓄電池的電壓過低時(shí),VT14和VT15均截止,太陽(yáng)能電池和風(fēng)機(jī)的輸出電壓就對(duì)蓄電池充電。
3.1.2 逆變電路
采用單相全橋逆變電路,用功率MOSFET作為逆變電路的開關(guān)器件。功率MOSFET是一種多子導(dǎo)電的單極性電壓控制型器件,具有開關(guān)動(dòng)作快、輸入阻抗大、驅(qū)動(dòng)功率小、無二次擊穿、驅(qū)動(dòng)電路簡(jiǎn)單、安全工作區(qū)大等優(yōu)點(diǎn),特別是由于具有正溫度系數(shù),可以自動(dòng)均衡電流,所以在輸入電壓低、工作電流大的逆變電源系統(tǒng)中可以將幾只功率MOSFET并聯(lián)以提高電流容量。在本系統(tǒng)中,將三只功率MOSFET并聯(lián),使電流容量增大到三倍。逆變器將整流后的直流電壓轉(zhuǎn)換成特定頻率的SPWM波,再經(jīng)過電感和電容濾波將其轉(zhuǎn)換為220V的標(biāo)準(zhǔn)正弦波電壓,其中電感用變壓器次級(jí)的漏感代替,采用這種方式使系統(tǒng)結(jié)構(gòu)簡(jiǎn)單,噪音低,并且能有效地抑制波形中的高次諧波成分。
SPWM控制方式預(yù)先將0~360°的正弦值制成表格存于EPROM中。由于開關(guān)驅(qū)動(dòng)信號(hào)是利用正弦波參考信號(hào)與一個(gè)三角載波信號(hào)互相比較而生成的,常分為單極性和雙極性兩種情況。在開關(guān)頻率相同的情況下,由于雙極性SPWM控制產(chǎn)生的正弦波,其諧波含量和開關(guān)損耗均大于單極性,故本系統(tǒng)采用的是單極性SPWM控制。
3.2 系統(tǒng)的隔離和驅(qū)動(dòng)模塊
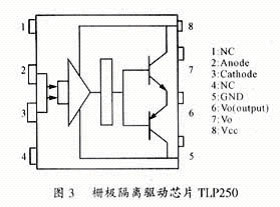
隔離和驅(qū)動(dòng)電路是將Intel80C196MC芯片輸出的SPWM信號(hào)加以隔離、放大,形成驅(qū)動(dòng)各功率器件開關(guān)動(dòng)作信號(hào)的電路。本系統(tǒng)采用東芝公司生產(chǎn)的專用于驅(qū)動(dòng)功率MOSFET和IGBT的柵極隔離驅(qū)動(dòng)芯片TLP250,其結(jié)構(gòu)框圖如圖3所示。它是一光電耦合器件,但又不同于普通的光耦,由于其輸出級(jí)是經(jīng)推挽電路放大輸出的,所以它不但能使原副邊隔離,而且具有驅(qū)動(dòng)能力,特別適合于驅(qū)動(dòng)中等功率的MOSFET和IGBT。同時(shí),在工程應(yīng)用中為了從硬件上可靠防止同一橋臂上的兩個(gè)功率器件上下直通,故將驅(qū)動(dòng)同一橋臂功率器件的兩個(gè)TLP250的腳2和腳3互相對(duì)接,形成互鎖電路,從而有效地防止了橋臂功率器件的直通故障。具體電路見圖4。

3.3 控制電路及控制芯片
控制電路主要通過對(duì)直流電流、直流電壓、交流電流、交流電壓等信號(hào)的檢測(cè),實(shí)現(xiàn)系統(tǒng)的過壓、欠壓、過流、過放電、過熱和反時(shí)限等保護(hù)功能。控制芯片采用Intel80C196MC微處理器。
Intel80C196MC是Intel公司于1992年推出的真正的16位單片機(jī),由于此片內(nèi)集成了一個(gè)頗具特色的波形發(fā)生器(WG)單元,從而大大簡(jiǎn)化了用于產(chǎn)生SPWM波形的軟件和外部硬件電路。波形發(fā)生器有3個(gè)獨(dú)立的模塊,每個(gè)模塊均包含一個(gè)數(shù)值比較器、比較寄存器、比較緩沖器、無信號(hào)時(shí)間發(fā)生器和一對(duì)可編程輸出驅(qū)動(dòng)通道。三相波形有共同的載波頻率和共同的死區(qū)時(shí)間,可編程為三角波調(diào)制方式或鋸齒波調(diào)制方式,一旦啟動(dòng)后只要求在改變PWM占空比時(shí)加以干預(yù),其余時(shí)間均不占用CPU。
波形發(fā)生器由時(shí)基發(fā)生器、相驅(qū)動(dòng)通道和控制保護(hù)電路組成。
時(shí)基發(fā)生器為PWM波形建立載波周期。80C196MC通過從重裝載寄存器(WG-RELOAD)中讀入數(shù)據(jù)來確定載波周期的長(zhǎng)短,因此用戶可以通過在程序中改變重裝載寄存器的值來改變載波周期值。
相驅(qū)動(dòng)通道確定PWM波形的占空比。每相驅(qū)動(dòng)通道都有各自的相比較緩沖寄存器(WG-COMPX),一般情況下,PWM波形的占空比由工作方式、重裝載寄存器和相比較緩沖寄存器這三個(gè)方面來決定。
控制電路包括控制寄存器(WG-CONTROL)和輸出寄存器(WG-OUT)。同時(shí),CPU內(nèi)部還有一個(gè)保護(hù)電路用于監(jiān)測(cè)EXTINT輸入端,以便對(duì)異常情況進(jìn)行處理。
另外,無信號(hào)時(shí)間發(fā)生器電路是波形發(fā)生器的一個(gè)非常重要的功能,可以用來防止一對(duì)互補(bǔ)的PWM信號(hào)同時(shí)有效,從而避免了同一橋臂的上下兩只功率管直通;同時(shí),用戶可以通過軟件向WG-CON寄存器的低10位裝入一個(gè)數(shù)來任意設(shè)置無信號(hào)時(shí)間。
4 系統(tǒng)控制原理
系統(tǒng)控制方式采用電流反饋、電壓前饋和電壓反饋相結(jié)合的復(fù)合控制方式,電流反饋、電壓反饋采用數(shù)字PI調(diào)節(jié)器,以實(shí)現(xiàn)系統(tǒng)的穩(wěn)態(tài)輸出無靜差;PI控制是將采樣時(shí)刻偏差的比例(P)、積分(I)通過線性組合構(gòu)成控制量,對(duì)被控對(duì)象進(jìn)行控制,PI控制器的傳遞函數(shù)為:
![]()
式中:Kp——比例系數(shù)
;
TI——積分時(shí)間常數(shù)。
電流反饋在WG中斷時(shí)完成,由于電流調(diào)節(jié)時(shí)間極短,所以大大提高了系統(tǒng)的動(dòng)態(tài)響應(yīng)速度并有效抑制了系統(tǒng)的超調(diào)。其中電流調(diào)節(jié)時(shí)間t大約如下:
t=(20/196)×5×8ms≈4ms
由此可見,系統(tǒng)輸出電壓在不到1/4基波周期內(nèi)就可以恢復(fù)正常。
5 系統(tǒng)軟件設(shè)計(jì)
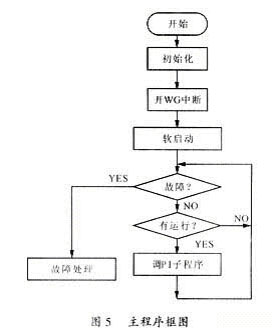
系統(tǒng)軟件部分主要包括主程序、WG中斷程序、PI調(diào)節(jié)子程序等。主程序的任務(wù)主要是初始化、故障判斷、運(yùn)行信號(hào)判斷及等待中斷等,主程序框圖如圖5所示。
6 結(jié)語(yǔ)
根據(jù)上述控制思想設(shè)計(jì)的1kW樣機(jī),經(jīng)過檢驗(yàn),整機(jī)效率≥85%,輸出電壓為220(1±4%)V,輸出電壓頻率為50(1±0.5%)Hz,并且系統(tǒng)具有過壓、欠壓、過熱、過流、短路和反時(shí)限等完善的保護(hù)功能。空載時(shí)的電壓波形如圖6所示。目前,該系統(tǒng)已在開封市黃河河務(wù)局運(yùn)行近半年,情況良好。
參考文獻(xiàn)
1]京特,萊納等著.余世杰,何慧若譯.太陽(yáng)能的光伏利用[M].合肥:合肥工業(yè)大學(xué),1991.
2]孫涵芳主編.Intel16位單片機(jī)[M].北京航空航天大學(xué)出版社,1995.
3]黃俊,王兆安主編.電力電子變流技術(shù)[M].機(jī)械工業(yè)出版社,1992.
4]陶永華主編.新型PID調(diào)節(jié)器[M].機(jī)械工業(yè)出版社,2000.
5]張占松,蔡宣三編著.開關(guān)電源的原理與設(shè)計(jì)[M].電子工業(yè)出版社,1999.
6]陳伯時(shí)主編.電力拖動(dòng)自動(dòng)控制系統(tǒng)[M].機(jī)械工業(yè)出版社,1997.