
0 引 言
目前由于對光感器件的測試大都依賴于全手工完成,不僅測試效率低,而且測試過程的精度以及測試數(shù)據(jù)的可靠性都不能得以保證。
根據(jù)現(xiàn)狀,設(shè)計了一套針對光感信號測試的智能型信號采集分析系統(tǒng)。在設(shè)計該系統(tǒng)時充分考慮其使用的穩(wěn)定性,可靠性以及可維護(hù)性,特別是對系統(tǒng)故障自診斷方面進(jìn)行了強化,這里將針對該系統(tǒng)的原理結(jié)構(gòu)進(jìn)行論述。
1 自動數(shù)據(jù)采集分析系統(tǒng)
在現(xiàn)有常見工程中,數(shù)據(jù)采集分析系統(tǒng)一般必須包含兩個模塊:數(shù)據(jù)采集模塊和數(shù)據(jù)分析模塊。
數(shù)據(jù)采集模塊的任務(wù)是按照工作人員預(yù)先設(shè)計好的順序以及指定參數(shù)進(jìn)行數(shù)據(jù)的自動采集,并且進(jìn)行存儲以便被數(shù)據(jù)分析模塊調(diào)用。數(shù)據(jù)采集模塊一般包括硬件部分和軟件部分:硬件部分包括采集過程所需要的測試儀器以及采集模塊控制電路設(shè)計,而軟件部分則包括測試系統(tǒng)的驅(qū)動以及信號采集過程的軟件設(shè)計。
數(shù)據(jù)分析模塊的任務(wù)是調(diào)用數(shù)據(jù)采集模塊采集完成的數(shù)據(jù)進(jìn)行各種數(shù)據(jù)分析,包括數(shù)據(jù)比較,數(shù)據(jù)查詢,報表的生成和打印等功能。
2 光感器件
光感器件的作用是能夠?qū)⒐庑盘栕兂呻娦盘枴9飧衅骷刺綔y原理可分為兩類:熱探測型和光子探測型。熱探測型首先將光信號的能量變?yōu)樽陨淼臏囟茸兓缓笤僖蕾囉谄骷撤N溫度敏感特性將溫度變化轉(zhuǎn)變?yōu)橄鄳?yīng)的電信號。光子探測型基于光電效應(yīng)原理,即利用光子本身能量激發(fā)載流子,響應(yīng)速度快靈敏度高,使用最為廣泛。
3 針對光感器件設(shè)計的數(shù)據(jù)采集分析系統(tǒng)
3.1 系統(tǒng)的需求分析
針對光感器件測試過程所需要達(dá)到的精度,設(shè)計自動數(shù)據(jù)采集分析系統(tǒng)。通過本系統(tǒng)希望大大提高測試效率并保證測試的可靠性、穩(wěn)定性和可維護(hù)性。
3.2 測試的對象
本系統(tǒng)所測試的對象為八象限光電二極管,該器件具有的特點:象限呈軸對稱且中心對稱分布,感光區(qū)域(所需要測試的部位)有8個,分別為內(nèi)四象限和外四象限。內(nèi)四象限感光面較小,而且感光層分布不均勻,測試難度高。外四象限感光面較大,而且感光層分布均勻,測試難度低。
對該器件的測試過程是:將一定波長的激光光源照射該器件,分別在找到八個象限內(nèi)相應(yīng)感應(yīng)最大的測試值作為測試數(shù)據(jù),所需要測試不同的數(shù)據(jù)可以通過控制采集模塊內(nèi)部電路以及控制采集參數(shù)來完成。
3.3 系統(tǒng)的基本原理
系統(tǒng)的基本原理如圖1所示。
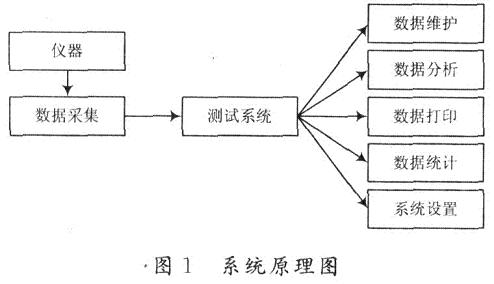
通過數(shù)據(jù)采集模塊得到測試數(shù)據(jù),把測試數(shù)據(jù)存入系統(tǒng)數(shù)據(jù)庫中。
有了測試數(shù)據(jù),數(shù)據(jù)維護(hù)模塊就可以進(jìn)行數(shù)據(jù)的刪除、修改、備份/恢復(fù)等維護(hù)工作。
數(shù)據(jù)打印模塊完成對測試數(shù)據(jù)的打印工作。
數(shù)據(jù)分析模塊通過設(shè)置測試參數(shù)實現(xiàn)數(shù)據(jù)顯示。
系統(tǒng)設(shè)置模塊實現(xiàn)系統(tǒng)正常運行的各種參數(shù)的設(shè)置。
該系統(tǒng)的基本需求首先是需要實現(xiàn)測試數(shù)據(jù)的采集,并能由采集數(shù)據(jù)通過計算公式計算出分析數(shù)據(jù),最后把采集數(shù)據(jù)和計算數(shù)據(jù)一并存入數(shù)據(jù)庫。
3.4 系統(tǒng)的環(huán)境
由于光感器件測試時對環(huán)境變化非常靈敏,因此將此系統(tǒng)設(shè)計在一個長寬高分別為:4 m×3 m×2.5 m的屏蔽室中,將自然光、電磁干擾、人為因素對測試過程的影響減到最小程度。
3.5 系統(tǒng)的硬件設(shè)計
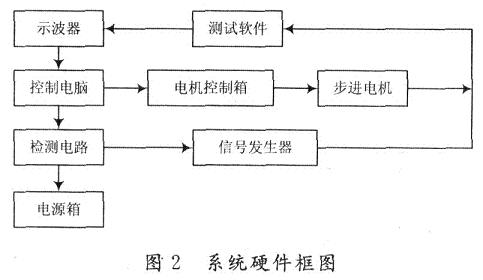
考慮到對被測試器件所需的激光光源位置需要固定,系統(tǒng)的硬件框架設(shè)計如下:由3臺具有高靈敏度的步進(jìn)電機帶動構(gòu)成三維移動平臺,被測器件固定在該平臺上。通過示波器返回光電器件的輸出,由軟件程序找到某一象限內(nèi)的感光最大值。通過串口將控制命令代碼傳給控制電路的單片機,并由單片機來改變不同的測試條件進(jìn)行測試。系統(tǒng)硬件框圖如圖2所示。
由于光感器件測試時所要求的高靈敏度,采集模塊硬件需要很高的精度。本系統(tǒng)應(yīng)用北京卓立漢光儀器有限公司生產(chǎn)的SC300系列步進(jìn)電機控制箱,設(shè)計出一套xyz三軸可控系統(tǒng)。x軸采用TSAx一(A)系列標(biāo)準(zhǔn)型電控平移臺,分辨率達(dá)到1.25μm。y軸采用TSAx—C系列超薄型電控平移臺,分辨率達(dá)到了O.625μm。z軸采用TSAV60—1S電控升降臺,分辨率達(dá)到了O.01mm。三個軸的精度都達(dá)到了測試要求。
采集模塊的核心工作由一塊51系列單片機來完成,當(dāng)采集系統(tǒng)根據(jù)用戶要求到達(dá)需要測試處,單片機負(fù)責(zé)切換測試的通道,以及測試采集數(shù)據(jù)。
3.6 系統(tǒng)的接口設(shè)計
為了實現(xiàn)數(shù)據(jù)采集、數(shù)據(jù)的存儲、分析處理功能,有必要實現(xiàn)一套數(shù)據(jù)采集并存儲、分析處理和查詢的軟件系統(tǒng),基本的方法是通過PC與TDS3000示波器連接得到采集數(shù)據(jù),并儲存到數(shù)據(jù)庫進(jìn)行分析處理。
本系統(tǒng)運行于Windows系列操作系統(tǒng)平臺之上,需要PC和測試儀器TDS3000之間進(jìn)行連接,并且安裝儀器所帶的相關(guān)設(shè)備驅(qū)動。硬件的連接方式是使用PC的以太網(wǎng)口和TDS3000的以太網(wǎng)口相連接。通過使用測試命令,可以使測試軟件方便地得到測試儀器的采集數(shù)據(jù)。