
引言
小區(qū)域坐標(biāo)測量技術(shù)有著重要的工程應(yīng)用價值,坐標(biāo)傳感器是這一領(lǐng)域的關(guān)鍵部件,采用光電元件設(shè)計是因為以其高精度、高分辨率、大動態(tài)范圍,利用光敏元件上的光電流隨光強變動而變化這一現(xiàn)象實現(xiàn)幾何增量,設(shè)計成光電傳感器,可廣泛地應(yīng)用于靜態(tài)測量、動態(tài)測量及自動化控制等領(lǐng)域。為了滿足實際工程的需要,小區(qū)域坐標(biāo)測量技術(shù)正逐步受到重視,但是目前關(guān)于傳感器應(yīng)用的文獻(xiàn)中,對此方面論述的不多。本文就傳感器的工作原理、電路設(shè)計、及其應(yīng)用和檢測信息的處理方法進(jìn)行了論述。
1、光電傳感器工作原理
光電傳感器的基本轉(zhuǎn)換原理是將被測量參數(shù)轉(zhuǎn)換成光信號的變化,然后將光信號作用于光電元件轉(zhuǎn)換成電信號的輸出。常用的光電傳感器是采用發(fā)光二極管作為光源,光源經(jīng)過透鏡聚焦于空間某一點。如果在該點有障
礙物,光就照不到光敏二極管上,電路處于偏置狀態(tài),PN結(jié)截止,反向電流很小。當(dāng)沒有障礙物遮擋時,光照到光敏二極管上時,PN結(jié)附近產(chǎn)生電子——空穴對,并在外.電場和內(nèi)電場的共同作用下,漂移過PN結(jié),產(chǎn)生光電流。此時,光電流與光照強度成正比,光敏二極管處于導(dǎo)通狀態(tài)。
具體方法是在光源側(cè)使用發(fā)光二極管,在受光側(cè)使用光敏二極管,并將信號處理電路集成制作在一塊芯片上。它的特點是體積小,可靠性高,工作電源電壓范圍寬,接口電路的復(fù)雜程度大幅度減少,可直接與TTL,LSTTL和CMLS電路芯片連接。
2、光電傳感器測量位移和方向的工作原理
2.1傳感器的結(jié)構(gòu)設(shè)計
如果將被測旋轉(zhuǎn)圓盤置于光電斷續(xù)器的發(fā)光與受光側(cè)之間,圓盤上有許多狹縫,圓盤旋轉(zhuǎn),光源發(fā)出的光間隔地被狹縫遮擋,受光側(cè)得到斷續(xù)的強光和弱光信號。如圖1所示,若旋轉(zhuǎn)圓盤沒有旋轉(zhuǎn),光路檢測的光束沒有被遮擋,測量電路中,X光敏二極管上輸出電壓波形,Y光敏二極管上的輸出電壓波形是相同的,相位是相差π/2的。若圓盤旋轉(zhuǎn),雙輸出型的輸出電壓波形如圖2所示,(僅畫出Q1的時序圖,Q2的時序圖道理一樣)圓盤轉(zhuǎn)動方向若向左,Q2輸出電壓相位落后被屏蔽;反之,圓盤向右旋轉(zhuǎn),Q1輸出電壓相位超落后被屏蔽。因此,兩個輸出電壓的相位關(guān)系反映圓盤的旋轉(zhuǎn)方向,圓盤的位移可以通過Q1,Q2輸出脈沖個數(shù)的代數(shù)和得到。
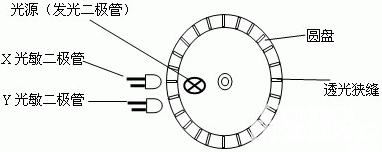
圖1
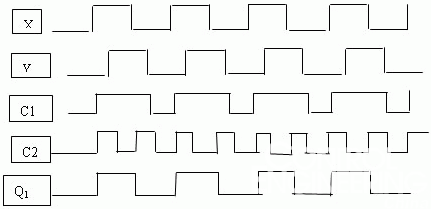
圖2
2.2傳感器的電路設(shè)計
X光敏二極管與Y光敏二極管在相位上相差π/2,所以它們在光電元件上取得的信號必是相差π/2。當(dāng)圓盤作正向轉(zhuǎn)動時,X信號超前Y信號。因為電路比較復(fù)雜,采用美國Lattice半導(dǎo)體公司推出的ispEXPXRT軟件對CPLD器件進(jìn)行硬件編程,如圖3所示電路圖是基于CPLD設(shè)計的。或門C1產(chǎn)生的信號作為D鎖存器Q1的置位端只許X產(chǎn)生的正脈沖通過,而D鎖存器Q2因為C1作用時Y信號尚在低電平,信號被屏蔽,Q2輸出低電平,門電路在加減計數(shù)器中作加法運算。當(dāng)圓盤作反方向轉(zhuǎn)動時,則Y產(chǎn)生的負(fù)值信號超前X產(chǎn)生的信號,或門C1產(chǎn)生的信號作為D鎖存器Q2的置位端只讓Y產(chǎn)生的負(fù)脈沖通過,而D鎖存器Q1因為C1作用時X信號尚在低電平,信號被屏蔽,Q1輸出低電平,門電路在可逆計數(shù)器中作減法運算。這樣就完成了辨向過程。OUT0是輸出,OUT1是進(jìn)位,Z是控制端輸入。工作原理圖如圖4所示。
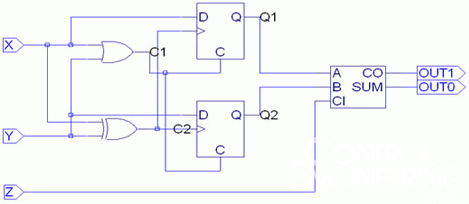
圖3

圖4
3、光電式坐標(biāo)傳感器的結(jié)構(gòu)設(shè)計及坐標(biāo)算法
3.1結(jié)構(gòu)設(shè)計
在實際的設(shè)計過程中,首先根據(jù)需要設(shè)計傳感器的測量精度及范圍。精度可以通過計算圓盤上的狹縫密度完成,傳感器圓盤的形狀及尺寸大小由測量范圍來確定,整個傳感器系統(tǒng)結(jié)構(gòu)框圖如圖5所示。

圖5
測量結(jié)構(gòu)如圖6所示,由四個光敏二極管(元件1、2、4、6)、兩個光源(發(fā)光二極管3、5)、位移圓盤7、方向圓盤9及傳動軸8組成。將傳感器垂直配置,分別代表位移z和Φ移動方向,組成一個二維傳感器。
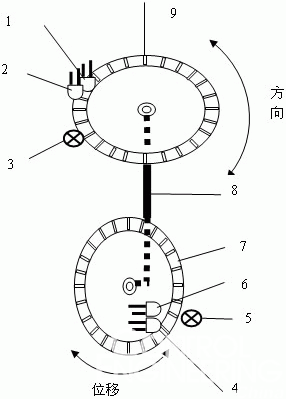
圖6
3.2坐標(biāo)算法
當(dāng)被測物坐標(biāo)發(fā)生時,圓盤7轉(zhuǎn)動,光敏二極管4和光敏二極管6通道的信號發(fā)生變化,通過接口電路自動傳輸?shù)接嬎銠C里,計算機自動對輸入通道的信號進(jìn)行數(shù)據(jù)采集。如果前進(jìn)或者后退的角度發(fā)生變化,位移圓盤9角度也隨著發(fā)生變化,通過傳動軸轉(zhuǎn)動帶動方向圓盤產(chǎn)生轉(zhuǎn)動,使得圓盤9上的狹縫通斷光敏二極管上的光照,發(fā)出與前進(jìn)或后退相應(yīng)的電脈沖信號,通過接口電路自動傳輸?shù)接嬎銠C里,對輸入通道的信號進(jìn)行數(shù)據(jù)采集。并將采集的數(shù)據(jù)進(jìn)行儲存,形成數(shù)據(jù)庫,以備計算機通過數(shù)據(jù)計算確定自身的坐標(biāo)位置,并通過相應(yīng)接口進(jìn)行數(shù)據(jù)輸出。相對坐標(biāo)XN、YN計算公式如下:
XN=Z*cosYN=Z*sin
為了確保測量精度,計算機的采樣時間不能太大,應(yīng)該接近光電傳感器的反映時間,最好同步,或者成倍數(shù)關(guān)系。
3.3坐標(biāo)與電壓的轉(zhuǎn)換
根據(jù)光——電轉(zhuǎn)換原理,輸出的電壓變化規(guī)律也正好是周期變化,變化的靈敏度與狹縫之間的距離有關(guān),狹縫之間的距離可以根據(jù)需要加工,但受到工藝和技術(shù)水平的限制,也可以通過計算機特性補償?shù)玫健?/p>
3.4輸入信號的線性化處理
若輸入與輸出量之間為直線性比例關(guān)系,稱為線性關(guān)系。然而理想的線性關(guān)系的傳感器極少。為了實現(xiàn)其線性化可采用電子電路,也可以使用計算機的修正功能。
4、測試結(jié)果
將自行設(shè)計的傳感器,應(yīng)用于足球機器人場地與球門的坐標(biāo)位置測試,在1.000m×1.000m的平面場地上進(jìn)行測試,測量數(shù)據(jù)與實際數(shù)據(jù)比較如下:

上圖表明在較小的區(qū)域內(nèi),采用低成本的組合傳感器完成坐標(biāo)的自動檢測,并且輸出比較穩(wěn)定,抗干擾能力強,達(dá)到預(yù)期設(shè)計要求。
5、結(jié)論
通過本文給出的設(shè)計方法,設(shè)計出光電式坐標(biāo)傳感器,它具有集成化特點,靈敏度高,抗干擾性強、體積小等特點,可廣泛地應(yīng)用于靜態(tài)測量、動態(tài)測量及自動化控制等領(lǐng)域。因此,光電式坐標(biāo)傳感器具有廣泛的實用性。缺點:測量中注意傳感器測量地連續(xù)性,不可中途中斷使用,需要專業(yè)安裝技能,光源應(yīng)與使用場合匹配。需要今后在此方面不斷的努力,改進(jìn)和完善坐標(biāo)傳感器的功能。