
盡管大部分的RF 和微波測(cè)試系統(tǒng)所要量測(cè)的對(duì)象只有區(qū)區(qū)幾種廣泛的類別- 放大器、發(fā)射器、接收器等,但每一套個(gè)別的系統(tǒng)卻會(huì)面臨一些不同的環(huán)境條件、要求和挑戰(zhàn)。雖然每一種狀況可能都不一樣,不過(guò)當(dāng)您在定義任何的RF和微波測(cè)試系統(tǒng)時(shí),卻有三項(xiàng)共通的因素會(huì)相互影響:效能、速度與穩(wěn)定(repeatability)。在每一位系統(tǒng)開(kāi)發(fā)者面臨的狀況各有不同的情況下,能否在這三項(xiàng)因素間做最佳的取捨將關(guān)系著量測(cè)結(jié)果是否能達(dá)到要求的正確性(integrity)水準(zhǔn)。
在DUT 到量測(cè)儀器之間的路徑上(圖1),有許多個(gè)點(diǎn)都會(huì)出現(xiàn)這些因素的取捨時(shí)機(jī),本文建議了一個(gè)考量這些取捨因素的架構(gòu),并且提供六大秘訣,教您如何克服RF 信號(hào)路徑上常會(huì)碰到的問(wèn)題。
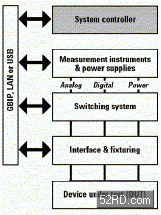
圖1:在所有的測(cè)試系統(tǒng)架構(gòu)下,都有很多的機(jī)會(huì)可以在效能、速度與穩(wěn)定之間求取最佳的平衡,以控管量測(cè)的正確性。
秘訣一:排定效能、速度與穩(wěn)定的優(yōu)先順序
為了讓全部六大秘訣有論述的依據(jù),有必要先釐清我們對(duì)效能、速度及穩(wěn)定的定義。在大部分的情況下,只有其中一個(gè)或兩個(gè)因素會(huì)成為首要的考量條件,主導(dǎo)您的測(cè)試需求與設(shè)備的選擇。無(wú)論如何,仔細(xì)地審視效能、速度與穩(wěn)定之間的相互影響與取捨關(guān)系(如表1 到表3 的摘要所列),將可協(xié)助您掌控特有的需求狀況。
基本的定義
效能
在RF 和微波測(cè)試設(shè)備中,安捷倫科技對(duì)“效能”的定義主要指的是儀器的準(zhǔn)確度、量測(cè)范圍和頻寬。儀器的準(zhǔn)確度包括明訂的振幅和頻率量測(cè)絕對(duì)準(zhǔn)確度;量測(cè)范圍指的是動(dòng)態(tài)范圍、失真、噪音位準(zhǔn)和相位噪音,這些屬性會(huì)影響信號(hào)位準(zhǔn)量測(cè)的精確度;而頻寬則是指可以處理和分析的頻率寬度或資料速率。速度測(cè)試系統(tǒng)的速度或Throughput 會(huì)取決于所使用的硬件、輸入/ 輸出(I/O)介面和軟件,我們的重點(diǎn)將放在硬件和四項(xiàng)會(huì)影響速度的因素上:量測(cè)設(shè)定時(shí)間、量測(cè)執(zhí)行時(shí)間、資料處理時(shí)間、以及資料傳輸時(shí)間。在RF 和微波的頻率,設(shè)定時(shí)間中非常重要的一環(huán)就是DUT 或測(cè)試系統(tǒng)在每次變更(例如切換器的開(kāi)或閉、功率位準(zhǔn)改變)之后, 所需的穩(wěn)定時(shí)間(settling time)。
穩(wěn)定一致性對(duì)任何測(cè)試系統(tǒng)來(lái)說(shuō),每一次的測(cè)試以及每天的測(cè)試都能產(chǎn)生一致的結(jié)果是非常重要的。然而,穩(wěn)定佳并不代表精確度也高,因?yàn)榫_度會(huì)取決于個(gè)別儀器的效能,而穩(wěn)定指的是無(wú)論明訂的準(zhǔn)確度為何,所量測(cè)到的結(jié)果都是一致的。就每一部?jī)x器而言,穩(wěn)定可能會(huì)因某些量測(cè)或模式而異,因此查看產(chǎn)品的規(guī)格或詢問(wèn)制造商是很重要的。在某些程度內(nèi),透過(guò)更多次的平均,或修改演算法以準(zhǔn)確地逼近符合標(biāo)準(zhǔn)量測(cè)方法所得到的結(jié)果,將可以提高穩(wěn)定。將量測(cè)設(shè)定(如中心頻率、頻距和衰減位準(zhǔn))的改變次數(shù)減到最少,可以達(dá)到最佳的穩(wěn)定一致性。
三者的關(guān)系概述
DUT 的測(cè)試要求和商業(yè)上的考量可以協(xié)助您評(píng)估效能、速度與穩(wěn)定之間的相對(duì)重要性,一旦您確立了首要的考量條件及其要求的高低程度后,就比較容易理出彼此的關(guān)系及其對(duì)系統(tǒng)的影響。表1、表2 和表3 分別就兩種狀況:首要考量條件的要求為高或低,摘要整理了相互間的影響關(guān)系。

表1:以效能為首要的考量條件時(shí),最重要的相互影響因素是效能和速度。

表2:以速度為首要的考量條件時(shí),最重要的關(guān)系在于速度和穩(wěn)定。

表3:以穩(wěn)定一致性為首要的考量條件時(shí),最重要的關(guān)系也是穩(wěn)定一致性和速度。
穩(wěn)定與效能
在表1 和表3 中,穩(wěn)定與效能之間有一個(gè)重要的第二層關(guān)系,這是由量測(cè)不確定度所串起的一種間接關(guān)系。面對(duì)不確定度時(shí),有些系統(tǒng)開(kāi)發(fā)人員會(huì)設(shè)計(jì)一個(gè)“誤差量”(error budget),其大小取決于測(cè)試要求與系統(tǒng)不確定度之間的差距。影響不確定度的兩大主要因素是絕對(duì)準(zhǔn)確度(儀器的效能)和量測(cè)一致性(穩(wěn)定)。如果系統(tǒng)中的儀器具有很高的絕對(duì)準(zhǔn)確度,那么誤差量中就有較大的空間可以容忍較低的穩(wěn)定。如果儀器可以提供一致的結(jié)果,那么誤差量中也會(huì)有較大的空間可以容忍較低的絕對(duì)準(zhǔn)確度。
多項(xiàng)要求皆“高”
若要滿足“高速與高穩(wěn)定”或“高效能與高速”這類多重的要求,可能就需要使用復(fù)雜精密的儀器,其價(jià)格相較于能力較差的設(shè)備自然會(huì)稍微高一些。不過(guò),許多高性能的儀器中可能會(huì)內(nèi)建硬件加速器,可以加快一些耗時(shí)的作業(yè),如平均計(jì)算和校準(zhǔn)。有些機(jī)種也可能包含多種演算法,可以計(jì)算諸如相鄰頻道功率(ACP)等參數(shù)。如果全部三項(xiàng)要求皆“高”,就必須仔細(xì)檢查系統(tǒng)的每一個(gè)部份-測(cè)試設(shè)備、切換子系統(tǒng)、纜線、接頭等。最佳的解決方案很可能價(jià)格也不低,但可以提供一些額外的功能和優(yōu)點(diǎn)。
秘訣二:審視DUT 的本質(zhì)和特性
典型的自動(dòng)化測(cè)試系統(tǒng)可以執(zhí)行三項(xiàng)基本的任務(wù):提供信號(hào)源、進(jìn)行量測(cè)、以及進(jìn)行切換,至于該使用哪一種信號(hào)產(chǎn)生器、功率錶、頻譜分析儀、網(wǎng)路分析儀、切換矩陣(switch matrix)和纜線,則取決于DUT 的電性和機(jī)構(gòu)屬性。在RF 和微波的頻率,有一些基本的特性需要特別留意。
電性參數(shù)
DUT 的基本性質(zhì)是主要的考量:它是被動(dòng)和線性的,或是主動(dòng)和非線性的?被動(dòng)的線性元件較容易處理,因?yàn)樗鼈冊(cè)谡麄€(gè)工作頻寬范圍內(nèi)所有允許的輸入功率位準(zhǔn)下,增益和相位偏移量一般都是固定的。相反地,主動(dòng)元件就需要格外謹(jǐn)慎,因?yàn)樗鼈兺ǔ>哂蟹蔷€性的工作區(qū)域,對(duì)輸入功率相當(dāng)敏感,可能會(huì)在不同的位準(zhǔn)產(chǎn)生不同的結(jié)果。如此一來(lái),可能就需要在測(cè)試系統(tǒng)中加入放大器或衰減器,以精確地控制功率位準(zhǔn),而且也許還要加入耦合器,將輸入到DUT 的功率位準(zhǔn)分一些出來(lái)并確認(rèn)是否正確。這些額外加入的東西千萬(wàn)不能輕忽:在高頻下,每一個(gè)系統(tǒng)組成要件都具有復(fù)數(shù)的阻抗值(伴隨有S參數(shù)),而且每多一項(xiàng)連接就有可能與DUT 產(chǎn)生不必要的相互影響。