
1、驅(qū)動電路的基本要求
一個理想的IGBT驅(qū)動電路應(yīng)具有以下基本性能:
(1)動態(tài)驅(qū)動能力強,能為IGBT柵極提供具有陡峭前后沿的驅(qū)動電壓脈沖;
(2)IGBT導(dǎo)通后,柵極驅(qū)動電路提供給IGBT的驅(qū)動電壓和電流要有足夠的幅度,使IGBT的功率輸出級總處于飽和狀態(tài),瞬時過載時,柵極驅(qū)動電路提供的驅(qū)動功率要足以保證IGBT不退出飽和區(qū)而損壞;
(3)能向IGBT提供適當(dāng)?shù)恼驏艍海话闳?15V為宜;
(4)能向IGBT提供足夠的反向柵壓,利于IGBT的快速關(guān)斷,幅值一般為5V-15V;
(5)由于IGBT多用于高壓場合,驅(qū)動電路必需有足夠的輸入輸出電隔離能力且不影響驅(qū)動信號的正常傳輸;
(6)具有柵壓限幅電路,保護柵極不被擊穿;
(7)輸入輸出信號傳輸具有盡可能短的延時;
(8)當(dāng)IGBT負載短路或過流時,能在IGBT允許時間內(nèi)通過逐漸降低柵壓自動抑制故障電流,實現(xiàn)軟關(guān)斷;
(9)當(dāng)出現(xiàn)過流、短路等情況時能迅速發(fā)出過流保護信號供給控制電路進行處理。
2、驅(qū)動器的選擇
目前,市場上常見的驅(qū)動器有日本富士EXB系列、日本英達HR系列、日本三菱M579系列及美國Unitrode公司的UC系列,它們功能大致相同,但也有許多不同之處。目前國內(nèi)流行使用的EXB841不具備定時邏輯柵壓控制的功能,過流時若驅(qū)動器入口信號消失,則其出口信號隨之消失而損壞IGBT,且關(guān)斷負壓-5V不夠可靠。
HR065的短路保護穩(wěn)定,但可靠性差。經(jīng)過對比分析,我們選用日本三菱公司的M57962AL驅(qū)動器。該驅(qū)動器具有如下特點:
(1)采用高速光偶隔離,輸入輸出隔離絕緣強度高 ;
(2)輸入輸出電平與TTL電平兼容,適于單片機控制;
(3)內(nèi)部有定時邏輯短路保護電路,同時具有廷時保護特性;
(4)具有可靠通斷措施(采用雙電源供電);
(5)驅(qū)動功率大,可以驅(qū)動600A/600V或400A/1200V的IGBT模塊。
M57962AL是厚模單列直插式封裝,如圖1所示,是從左至右依次編號,其中9~12為空端。各引腳功能如下:
- 1端和2端:故障檢測輸入端;
- 4端:接正電源VCC ;
- 5端:驅(qū)動信號輸出端 ;
- 6端:接負電源VEE ;
- 8端:故障信號輸出 ;
- 13端和14端:驅(qū)動信號輸入端。

圖1 M57962AL芯片的外觀尺寸圖
M57962AL芯片的內(nèi)部結(jié)構(gòu)及內(nèi)部保護電路如圖2和圖3所示。
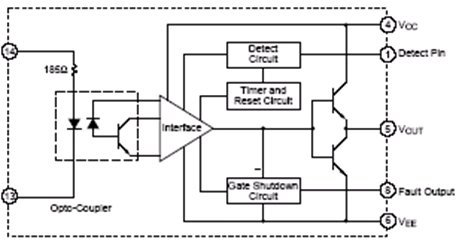
圖2 M57962AL芯片的內(nèi)部結(jié)構(gòu)圖
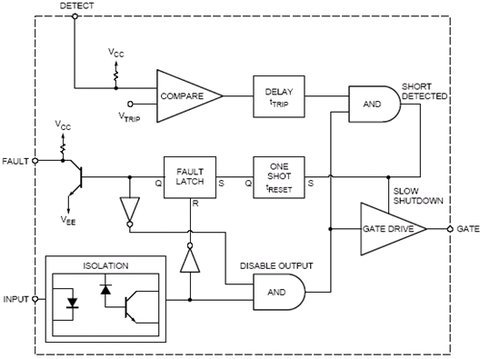
圖3 M57962AL的內(nèi)部保護電路圖
3、 驅(qū)動電路的實現(xiàn)
IGBT的驅(qū)動電路原理圖如圖4所示。
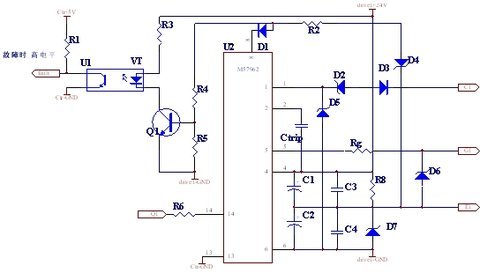
圖4 IGBT的驅(qū)動電路原理圖
圖中Q1為由控制電路產(chǎn)生的驅(qū)動信號輸入,fault為本驅(qū)動電路在檢測到過流等故障時發(fā)出的故障檢測信號。C1、G1、E1分別接IGBT的源、柵、漏級。驅(qū)動電路的供電采用單電源加穩(wěn)壓管方式,主要考慮了以下幾個方面的問題。
(1) 穩(wěn)壓管D的合理選擇
驅(qū)動器M57962AL通過檢測IGBT的通態(tài)飽和壓降(即1腳的電壓U1)來判斷是否過流,當(dāng)檢測出IGBT的柵極和源極同為高電平時就判斷為過流,此時降低柵極驅(qū)動電壓。并通過光耦向控制電路發(fā)出故障信號。IGBT正常工作時的通態(tài)壓降一般為2.5V~3.0V。而M57962AL的過流檢測端的閥值電壓Ucs設(shè)計為10V。如此高的閥值電壓對諸如橋臂直通、負載短路等情況有一定的保護作用。但動作非常遲緩,甚至起不到保護作用。因此必須降低過流保護閥值,方法是在檢測端串聯(lián)一穩(wěn)壓管D2,通過實驗來確定穩(wěn)壓管的穩(wěn)壓值。它們之間滿足如下關(guān)系:
![]()
當(dāng)芯片1腳的電壓U1達到過流檢測端的閥值電壓UCS,M57962AL軟降柵壓,同時發(fā)出故障信號。VD2選取越大則允許的VCE越小,IGBT允許流過的電流值亦越小。在本課題研究中,設(shè)定的管壓保護值為4.2V,對應(yīng)的保護電流值為300A,所以采用的穩(wěn)壓管D2的壓降為
![]()
(2)VCC、VEE的選取
由于IGBT導(dǎo)通后的管壓降與所加正向柵壓有關(guān),在漏源電流一定的情況下,正向柵壓增加時,通態(tài)壓降下降,器件導(dǎo)通損耗減小。但若發(fā)生過流或短路,正向柵壓越高,則電流幅值越高,IGBT越易損壞。對集電極額定電流200A的IGBT來說,VCC選擇+12V~+15V比較合適,在這一點通態(tài)接近飽和值,是IGBT工作的最佳點。而為使IGBT在關(guān)斷期間可靠截止,給處于截止狀態(tài)的IGBT外加-10V左右的反向柵壓VEE比較合適。實現(xiàn)電路中考慮到簡化輔助電源設(shè)計的因素,采用24V單電源外加9.1V穩(wěn)壓管的方式為驅(qū)動電路供電。即:VCC=+15V,VEE=-9V。
(3)柵極電阻Rg的選取
柵極驅(qū)動電阻的取值非常重要,適當(dāng)數(shù)值的柵極電阻能有效地抑制振蕩、減緩開關(guān)開通時間、改善電流上沖波形、減小電壓浪涌。從安全可靠性角度來說,應(yīng)當(dāng)取較大的柵電阻,但是,較大的柵電阻影響開關(guān)速度、增加開關(guān)損耗。從提高工作頻率角度,應(yīng)當(dāng)取較小的柵電阻。一般情況下,可靠性是第一位的,因此使用中傾向于取較大值的電阻。柵極電阻的最佳值應(yīng)當(dāng)通過實驗確定。本文中經(jīng)過實驗調(diào)試,選擇Rg=4.7Ω。
(4)電容Ctrip的選取
M57962AL與M57962L的不同之處就在于,M57962AL利用改變引腳2,4之間的電容Ctrip可以對短路保護檢測時間進行調(diào)整,應(yīng)用比較靈活。若2腳懸空,短路保護檢測時間為2.6μs,保護動作太靈敏常容易引起誤動作。為此,通過接在2,4腳之間一個電容Ctrip來調(diào)節(jié)保護時間,選取1000pF左右的電容,保護時間大約為3μs。若保護仍然過于敏感,可改用3300pF的電容,此時保護時間約為6μs。
此外,對于M57962AL驅(qū)動電路,在以下兩種情況容易導(dǎo)致驅(qū)動電路失去負偏壓:一是產(chǎn)生負偏壓的穩(wěn)壓二極管D2被擊穿短路;二是驅(qū)動電路在單電源供電時,因失去電源供電電壓的時候。此時若按傳統(tǒng)的M57962AL單電源供電的典型接法(如圖5),并沒有保護信號給出,易造成IGBT的損壞。
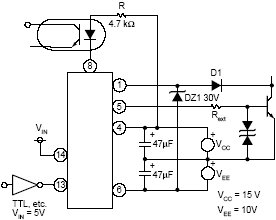
圖5 M57962AL的典型接法
針對上述情況,對M57962AL的外圍電路進行了一些改進(如圖4所示)。在正常情況下,D4導(dǎo)通,M57962AL的8腳為高電平,D1截止,VT導(dǎo)通,光耦輸出呈低阻態(tài),故障信號為低電平,表現(xiàn)為無故障。過流保護時,D4導(dǎo)通,M57962AL的8腳為低電平,D1導(dǎo)通,VT截止,光耦輸出呈高阻態(tài),故障信號為高電平,表現(xiàn)為有故障發(fā)生。如果穩(wěn)壓二極管D2擊穿短路,則D4截止,VT截止,光耦輸出呈高阻態(tài),同樣給出故障信號。如果驅(qū)動電路失去+24V電壓,則光耦無電流流過,仍然表現(xiàn)為故障保護。這樣就避免了IGBT因為失去負偏壓或者失去供電而導(dǎo)致?lián)p壞。另外這里為了加快對故障信號的反應(yīng),故障保護輸出光耦選用高速光耦6N137。
4 結(jié)語
性能優(yōu)越的驅(qū)動電路是高頻電源模塊運行可靠的保證。采用驅(qū)動器M57962AL實現(xiàn)IGBT的驅(qū)動電路,可以使IGBT工作可靠,性能穩(wěn)定。