
引言
汽車的普及為人們的生活帶來了方便,同時(shí)也給人們提出了一大難題——汽車防盜。本設(shè)計(jì)是為了解決以往汽車防盜產(chǎn)品的缺點(diǎn)和不足而開發(fā)的集成傳感、報(bào)警和遠(yuǎn)程圖像監(jiān)控3大功能模塊的汽車防盜報(bào)警系統(tǒng)。
系統(tǒng)工作原理及組成
本系統(tǒng)是把傳感器裝在車身的隱蔽位置,當(dāng)有人走進(jìn)監(jiān)控距離、車身移動(dòng)或振動(dòng)、車門被打開時(shí),傳感器發(fā)出電信號(hào),通過A/D轉(zhuǎn)換裝置,發(fā)送到主控制器。控制器根據(jù)信號(hào)的來源,把報(bào)警分為“有人靠近”、“車體振動(dòng)”和“車門被開”3個(gè)等級(jí),并用 GPRS/GSM終端將報(bào)警信息用短信的方式發(fā)送到用戶手機(jī)上。把“車門被開”作為高級(jí)別的報(bào)警,通知用戶的同時(shí),啟動(dòng)視頻驅(qū)動(dòng)程序,通過車內(nèi)的攝像頭把車內(nèi)實(shí)況記錄下來,發(fā)送到車主手機(jī)。前兩種情況下系統(tǒng)不傳輸圖像,除非客戶端主動(dòng)查看圖像,此時(shí),系統(tǒng)幾乎不占用信道。當(dāng)有入侵者進(jìn)入防范區(qū)域時(shí),MCU通過手機(jī)短信向用戶發(fā)出告警信息。由于此時(shí)發(fā)送的只是文字信息,信息量少,信息傳遞速度快。同時(shí),系統(tǒng)將告警時(shí)的畫面存放在系統(tǒng)內(nèi)的存儲(chǔ)器件中供用戶查看。
系統(tǒng)硬件設(shè)計(jì)
系統(tǒng)的總體框架
本系統(tǒng)硬件由以下幾個(gè)模塊組成:主控制器模塊、信息采
集模塊(傳感器)、USB攝像頭模塊、無線通信模塊(GPRS MODEM )和圖像壓縮模塊。
主控制模塊
三星的S3C2410基于ARM內(nèi)核,最大工作頻率能達(dá)到203MHz,能支持NAND閃存啟動(dòng),具有更高的性價(jià)比。另外,S3C2410在市場(chǎng)上己有很多成熟的應(yīng)用,因此選用了S3C2410作為系統(tǒng)的CPU。
S3C410集成了一個(gè)LCD控制器(支持STN和TFT液晶顯示屏)、NAND閃存控制器、SDRAM控制器、3個(gè)通道的UART、4個(gè)通道的DMA、4個(gè)具有PWM功能的計(jì)時(shí)器和1個(gè)內(nèi)部時(shí)鐘,以及8通道的10位ADC。
S3C2410還有很多豐富的外部接口,如觸摸屏、I2C總線、12S總線接口,以及2個(gè)US主機(jī)接口、1個(gè)USB設(shè)備接口、2個(gè)SPI接口、SD接口。在時(shí)鐘方面,S3C2410集成了一個(gè)具有日歷功能的RTC(實(shí)時(shí)控制)和具有PLL的芯片時(shí)鐘發(fā)生器。能產(chǎn)生200MHz的工作頻率。這樣的工作頻率能夠使處理器輕松運(yùn)行WinCE、Linux等操作系統(tǒng),以及進(jìn)行較為復(fù)雜的數(shù)據(jù)處理。
USB攝像頭
USB攝像頭主要由3部分構(gòu)成:鏡頭、圖像傳感器和USB接口控制芯片。本系統(tǒng)采用的攝像頭是市面上比較常見的一款。它的USB接口控制芯片型號(hào)是301p,圖像傳感器芯片采用CMOS技術(shù),因此性價(jià)比較高。該攝像頭可通過USB接口直接與主機(jī)通信,將采集到的圖像傳輸?shù)街鳈C(jī)。該芯片的特點(diǎn)如下:圖像最大為640×480像素,可根據(jù)不同攝像頭進(jìn)行配置調(diào)整;圖像白平衡等參數(shù)可配置;可在Arm-Linux嵌入式系統(tǒng)下高效運(yùn)行;通過I2C總線編程CMOS圖像傳感器內(nèi)部的寄存器來改變?nèi)笔?shù)。
無線通信模塊
本系統(tǒng)采用GSM2406模塊,它接口簡(jiǎn)單、使用方便,只需要單一的2.7V電源即可工作。采用AT指令對(duì)此模塊進(jìn)行控制,初步計(jì)劃與控制器之間采用串口進(jìn)行通信。同時(shí),用此模塊實(shí)現(xiàn)語音通話功能。由于GPRS是基于IP協(xié)議的,所以,處理器在與GPRS網(wǎng)絡(luò)通信的時(shí)候要發(fā)送符合IP協(xié)議的數(shù)據(jù)包。
圖像壓縮模塊
因?yàn)橐曨l處理芯片1s輸出25幀圖像 ,一幀640×480的圖像大約2.45Mb,為了緩和存儲(chǔ)器的存儲(chǔ)壓力,圖像必須經(jīng)過壓縮以提高存取速度。
系統(tǒng)設(shè)計(jì)采用集成JPEG編解碼的ZR36060圖像壓縮芯片。它可以方便地實(shí)現(xiàn)對(duì)視頻信號(hào)的實(shí)時(shí)壓縮/解壓縮。在進(jìn)行壓縮時(shí) ,ZR36060接收 YUV 4:2:2數(shù)字視頻信號(hào),將其編碼為JPEG碼流輸出;在解壓縮時(shí) ,它接收J(rèn)PEG碼流 ,將其解碼為YUV 4:2:2數(shù)字視頻信號(hào)輸出。
ZR36060的接口分為3個(gè)部分,分別為視頻接口、代碼與主機(jī)接口和控制接口。視頻接口的功能是完成輸入/輸出視頻信號(hào);代碼與主機(jī)接口的功能是通過主機(jī)完成對(duì)芯片控制字的初始化,并且在主動(dòng)方式下,JPEG壓縮碼流也經(jīng)過CODE[7:0]輸入/輸出;控制接口則完成一系列簡(jiǎn)單的工作順序控制操作。兩種視頻同步方式為同步主模式和同步從模式。同步主模式指芯片內(nèi)部產(chǎn)生所有的控制和定時(shí)信號(hào);同步從模式則是芯片作為從機(jī)同步于一個(gè)外部的視頻源。
數(shù)據(jù)采集模塊
防盜系統(tǒng)的數(shù)據(jù)采集模塊由微波多普勒傳感器組、振動(dòng)傳感器組、霍爾器件組和熱釋電紅外傳感器組組成,用于汽車防盜信息的采集以及數(shù)據(jù)的初步融合處理。數(shù)據(jù)采集模塊的構(gòu)成如圖1所示。
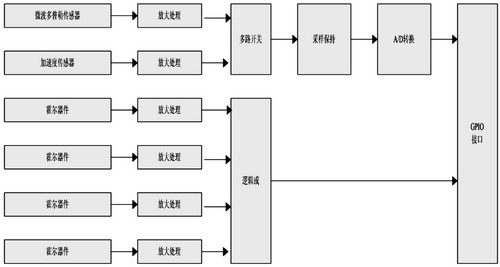
圖1 數(shù)據(jù)采集模塊的構(gòu)成
利用微波多普勒傳感器
對(duì)入侵范圍進(jìn)行監(jiān)測(cè)
微波多普勒傳感器采用Agilis公司的HB100微波運(yùn)動(dòng)傳感器模塊。HB100的多普勒效應(yīng)收發(fā)機(jī)模塊利用介質(zhì)諧振振蕩器和微帶接插天線技術(shù),可以實(shí)現(xiàn)低電流消耗、高溫穩(wěn)定性和高靈敏度。
利用加速度傳感器對(duì)車體振動(dòng)與傾斜進(jìn)行監(jiān)測(cè)
對(duì)車體的振動(dòng)與傾斜狀況進(jìn)行測(cè)量,可以對(duì)竊賊采用拖吊法盜竊車輛以及破壞車體的現(xiàn)象進(jìn)行預(yù)警。由于加速度傳感器ADXL202E能夠測(cè)量0~5kHz、士2g范圍內(nèi)的動(dòng)態(tài)或靜態(tài)加速度:動(dòng)態(tài)加速度的測(cè)量可以用于振動(dòng)檢測(cè),利用靜態(tài)的重力加速度作為輸入矢量,就可以確定物體的空間方向。因此可以利用ADXL202E同時(shí)對(duì)車體的振動(dòng)和傾斜角度進(jìn)行監(jiān)測(cè)。
利用霍爾開關(guān)器件
對(duì)車門的開關(guān)進(jìn)行監(jiān)測(cè)
A3210E是霍爾效應(yīng)開關(guān)器件。采用數(shù)字信號(hào)輸出,在南、北磁極的作用下均能產(chǎn)生霍爾效應(yīng):磁極靠近時(shí),開關(guān)打開,輸出電平為低;磁極遠(yuǎn)離時(shí),開關(guān)關(guān)閉,輸出電平為高。該類傳感器的功耗非常低,如A3209E的功耗低達(dá)400mW,特別適合低功耗應(yīng)用。
霍爾器件組的設(shè)計(jì)是將多個(gè)霍爾器件分布在汽車的4個(gè)車門,將車門打開時(shí),霍爾器件會(huì)發(fā)出微弱的電信號(hào),然后將每個(gè)開關(guān)器件的輸出信號(hào)送至器件組的局部決策中心進(jìn)行融合,這里將4個(gè)車門的警報(bào)等級(jí)看作相同,可以直接采用硬件進(jìn)行“或”
運(yùn)算,得到融合結(jié)果送至中央處理模塊。
設(shè)計(jì)中的關(guān)鍵技術(shù)
操作系統(tǒng)
Linux內(nèi)核的配置
配置Linux內(nèi)核的步驟如下:
首先,進(jìn)入系統(tǒng)的源代碼目錄/Linux-2.4.18,運(yùn)行menuconfig命令,系統(tǒng)就自動(dòng)進(jìn)入配置界面。界面很直觀,這里,需要分別對(duì)串口、網(wǎng)卡和攝像頭進(jìn)行配置。
1. 網(wǎng)卡和串口的配置
內(nèi)核映像的下載需要用到串口和網(wǎng)卡,必須對(duì)串口和網(wǎng)卡驅(qū)動(dòng)進(jìn)行修改,以保證能夠順利完成移植工作。為了使內(nèi)核支持串口,在進(jìn)行內(nèi)核配置時(shí),對(duì)串口必須要有以下的配置選項(xiàng):
[*] ARM AMBA PLOT! serial port support
[*]Support for console on AMBA serial port
對(duì)網(wǎng)卡必須要有以下的內(nèi)核配置選項(xiàng):
*)Ethernet (10 or 100M)
Generic Media independent Interface device support
[*]SMC 91C9x/91Clxxx support
串口驅(qū)動(dòng)程序位于源碼樹的///drivers/serial/amba.c,網(wǎng)卡驅(qū)動(dòng)程序位于linux/drivers/net/ann/smc9lx.c和linux/drivers/net/arm/smc9lx.h。網(wǎng)卡的Memory map要比串口的簡(jiǎn)單。
2. USB系統(tǒng)的配置
要啟用USB系統(tǒng),首先進(jìn)入U(xiǎn)SB support一節(jié)并啟用Support for USB選項(xiàng)(對(duì)應(yīng)模塊為usbcore.o)。接著,需要選擇USB主控制器驅(qū)動(dòng)程序。選項(xiàng)是EHCI(對(duì)應(yīng)模塊為ehci-hcd.o)、UHCI(對(duì)應(yīng)模塊為usb-uhci.o)和OHCI(對(duì)應(yīng)模塊為usb-ohci.o )。
每塊支持插入U(xiǎn)SB設(shè)備的主板都需要有USB主機(jī)控制器芯片。這個(gè)特別的芯片與插入系統(tǒng)的USB設(shè)備進(jìn)行交互操作,并負(fù)責(zé)處理允許USB設(shè)備與系統(tǒng)其他部分通信所必需的所有低層次細(xì)節(jié)。
啟用了USB support和USB主機(jī)控制器驅(qū)動(dòng)程序后,接下來應(yīng)該啟用Preliminary USB devicefilesystem,然后啟用USB外圍設(shè)備的驅(qū)動(dòng)程序。例如,為了啟用對(duì)USB攝像頭的支持,應(yīng)該啟用USB Camera support。
一旦用新的內(nèi)核重新引導(dǎo)后,目錄//proclbus/usb下應(yīng)該有相應(yīng)的USB設(shè)備信息。如若沒有信息,應(yīng)輸入以下命令,將USB設(shè)備文件手動(dòng)掛裝到//proc/bus/usb。
#mount-t usbdevfs none /proc/bus/usb
3. 攝像頭
本車載終端使用cam301p攝像頭,所以,在配制Linux系統(tǒng)內(nèi)核時(shí)要選擇cam301p這一項(xiàng)。
Multimedia devices--->
<*>Video For Linux
Video For Linux--->
[*]V4L information in proc filesystem
USB support--->
<*>USB cam301p Camera support
編譯新內(nèi)核
配置好內(nèi)核后,進(jìn)入//usr/src/linux-2.4.18目錄下執(zhí)行以下步驟:
1. $make dep,以正確設(shè)置所有的依賴關(guān)系。
2. $make clean,清除所有己存在的目標(biāo)文件。如果忘記做這一步,生成的內(nèi)核將會(huì)非常龐大。
3. $make zImage,生成一個(gè)經(jīng)過壓縮的內(nèi)核。
4. 運(yùn)行make modules和make modules_install。
5. make install。
一旦為目標(biāo)系統(tǒng)編譯了內(nèi)核,通過使用引導(dǎo)裝載程序(bootloader),內(nèi)核就被裝入到目標(biāo)系統(tǒng)的內(nèi)存。通過使用串口,引導(dǎo)裝載程序與主機(jī)通信,將內(nèi)核傳送到目標(biāo)機(jī)的DRAM中。將內(nèi)核完全裝入目標(biāo)機(jī)后,引導(dǎo)裝載程序?qū)⒖刂茩?quán)交給內(nèi)核。
圖像報(bào)警技術(shù)
圖像報(bào)警是系統(tǒng)的關(guān)鍵技術(shù),也是系統(tǒng)的難點(diǎn),通過對(duì)監(jiān)視圖像的分析和控制,實(shí)現(xiàn)報(bào)警和警情處理。該技術(shù)中融合了傳感器、數(shù)字化處理、攝像與圖像處理技術(shù)。報(bào)警流程圖如圖2所示。
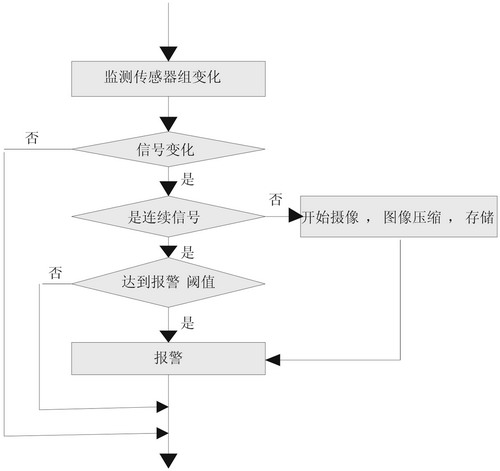
圖2 報(bào)警流程圖
由于傳感器是一種微弱信號(hào)檢測(cè)設(shè)備,很容易受外界因素的影響而導(dǎo)致誤報(bào)警,有些通過用戶的努力是可以避免的;有些從原理上講是不可以避免的,如小動(dòng)物和電磁波干擾引起的誤報(bào)警。為了盡量降低誤報(bào)率,該系統(tǒng)采用了一種數(shù)字化處理技術(shù),即對(duì)模擬信號(hào)直接進(jìn)行數(shù)字化處理,通過對(duì)各種入侵情況和干擾情況的綜合分析,在MCU上預(yù)先設(shè)定報(bào)警閾值。經(jīng)傳感器采集到的信號(hào)送至MCU處理,超過報(bào)警閾值時(shí),MCU啟動(dòng)報(bào)警;在報(bào)警閾值以下則判為干擾信號(hào),不報(bào)警。
結(jié)語
本設(shè)計(jì)以嵌入式系統(tǒng)為平臺(tái),結(jié)合傳感器、數(shù)據(jù)采集、圖像處理和無線通信技術(shù)實(shí)現(xiàn)了對(duì)汽車的遠(yuǎn)程監(jiān)控和防盜功
能,有效減少了汽車報(bào)警系統(tǒng)的誤報(bào)。在理論和實(shí)踐上實(shí)現(xiàn)了對(duì)汽車全天候的圖像監(jiān)控。由于受網(wǎng)絡(luò)狀態(tài)的影響,報(bào)警信息可能會(huì)有延遲,隨著網(wǎng)絡(luò)和通信技術(shù)的發(fā)展,相信這些問題都會(huì)得到完美的解決。
參考文獻(xiàn)
1. 楊興裕,吳海彬,許松清.GPRS無線傳輸在遠(yuǎn)程圖像監(jiān)控系統(tǒng)中的應(yīng)用[J].微計(jì)算機(jī)信息,2005,21(3):64
2. 杜春雷編著.ARM體系結(jié)構(gòu)與編程[M].北京:清華大學(xué)出版社,2003
3. 吳明暉,徐睿,黃健,徐辰.基于ARM的嵌入式系統(tǒng)開發(fā)與應(yīng)用.北京:人民郵電出版社,2004
4. 劉篤仁,韓保君.傳感器原理及應(yīng)用技術(shù).西安:西安電子科技大學(xué)出版社,2003
5. 毛德操、胡希明著.Linux內(nèi)核源代碼情景分析.杭州:浙江大學(xué)出版社,2001