
引 言
1 在MSP430上使用RTOS的意義
一般的觀點(diǎn)認(rèn)為,MSP430上使用RTOS是沒有意義的這是可以理解的。因?yàn)镸SP430的硬件資源有限(以MSP430F149為例,只有2KB RAM),任何商業(yè)操作系統(tǒng)都不可能移植到MSP430上。目前在MSP430上得到應(yīng)用的RTOS,只有μC/OS-II,但使用μC/OS-II 必須有昂貴的C編譯器,這嚴(yán)重地限制了其在MSP430上的使用。
正是基于以上情況,筆者在應(yīng)用MSP430過程中,編寫了一個(gè)基于MSP430F149的RTOS,暫定名為M430/OS。它占用RAM量少、代碼短小,稍加改動(dòng)就可適用于大多數(shù)其它MSP430單片機(jī)。
在MSP430單片機(jī)系統(tǒng)上使用M430/OS,對(duì)系統(tǒng)有以下意義:
① 實(shí)現(xiàn)軟件設(shè)計(jì)的模塊化。可將不同的功能模塊編制成相應(yīng)的任務(wù),由操作系統(tǒng)按級(jí)別調(diào)用,不必為先執(zhí)行哪個(gè)功能、后執(zhí)行哪個(gè)功能而費(fèi)神。
② 能更合理、有效地利用CPU有限的資源。按任務(wù)的重要程度安排任務(wù)的級(jí)別,能夠保證最重要的任務(wù)得以最及時(shí)執(zhí)行。
③ 大大降低系統(tǒng)故障率。低優(yōu)先級(jí)的任務(wù)發(fā)生阻塞時(shí),高優(yōu)先級(jí)任務(wù)的執(zhí)行不受影響。
2 M430/OS在MSP430F149上的實(shí)現(xiàn)
2.1 M430/OS功能特點(diǎn)
M430/OS有以下特點(diǎn):
① 采用占先式內(nèi)核,即高優(yōu)先級(jí)的任務(wù)可以從低優(yōu)先級(jí)任務(wù)“搶”回CPU控制權(quán);
② 每個(gè)任務(wù)都單獨(dú)開辟一個(gè)任務(wù)棧;
③ 每個(gè)任務(wù)占十幾到幾百字節(jié)的任務(wù)堆棧,任務(wù)棧的大小可以根據(jù)任務(wù)中現(xiàn)場(chǎng)數(shù)據(jù)、局部變量和嵌套調(diào)用的情況估算;
④ 每個(gè)任務(wù)各分配一個(gè)優(yōu)先級(jí),不支持兩個(gè)任務(wù)有相同的優(yōu)先級(jí);
⑤ 不支持信號(hào)量、郵箱功能;
⑥ 任務(wù)狀態(tài)只有三種:運(yùn)行(executing)、就緒(ready)、掛起(suspended);
⑦ 系統(tǒng)占用RAM量=((任務(wù)個(gè)數(shù)+1)×4)+6字節(jié),不包括任務(wù)堆棧;
⑧ 代碼量少,目前版本的代碼共有86行匯編代碼,256字節(jié)目標(biāo)代碼;
⑨ 理論上最多支持126個(gè)任務(wù);
⑩ 任務(wù)鎖定功能:在一段低優(yōu)先級(jí)的代碼中,不想讓操作系統(tǒng)把CPU權(quán)切換到別的任務(wù),這時(shí)可以把這代碼鎖定,在運(yùn)行這段代碼時(shí),就不會(huì)引起任務(wù)切換;
任務(wù)喚醒功能:在一個(gè)任務(wù)中產(chǎn)生一個(gè)的事件來觸發(fā)其它任務(wù)運(yùn)行(如果被觸發(fā)的任務(wù)優(yōu)先級(jí)高的話,就會(huì)馬上運(yùn)行)。
2.2 系統(tǒng)函數(shù)介紹
① OS_Init:多任務(wù)初始化,進(jìn)行任務(wù)棧(任務(wù)棧的結(jié)構(gòu)見圖1)、任務(wù)延時(shí)計(jì)數(shù)、任務(wù)狀態(tài)的初始化。初始化完成后,系統(tǒng)直接切換到最高優(yōu)先級(jí)的任務(wù),多任務(wù)系統(tǒng)啟動(dòng)。
② OS_Time_Dly:把當(dāng)前任務(wù)掛起一段指定時(shí)間讓其它任務(wù)運(yùn)行。
③ OS_Sched:任務(wù)調(diào)度,它先把每個(gè)任務(wù)的延時(shí)數(shù)減1,然后再找出最高優(yōu)先級(jí)的就緒任務(wù),并切換到這個(gè)就緒任務(wù)。如果無就緒任務(wù),就切換到空閑任務(wù)。
④ OS_Free_Task:空閑任務(wù),是一個(gè)很重要的系統(tǒng)任務(wù),當(dāng)所有任務(wù)都掛起時(shí),運(yùn)行此任務(wù)。它主要是對(duì)一個(gè)計(jì)數(shù)器Free_Count一直進(jìn)行累加,用戶可以根據(jù)這個(gè)計(jì)數(shù)器計(jì)算出CPU的利用率。
⑤ OS_Task_Lock:鎖定任務(wù)調(diào)度,禁止任務(wù)調(diào)度。主要用來鎖定在低優(yōu)先級(jí)中的一些可重入的代碼或一些重要代碼。
⑥ OS_Task_Unlock:解鎖任務(wù)調(diào)度,和上面的子程序功能相反。
⑦ OS_Task_Wakeup:?jiǎn)拘阎付▋?yōu)先級(jí)的任務(wù),并產(chǎn)生一次任務(wù)調(diào)度,如果被喚醒任務(wù)的優(yōu)先級(jí)比當(dāng)前運(yùn)行的任務(wù)的優(yōu)先級(jí)高,任務(wù)就會(huì)切換到被喚醒的任務(wù)中,否則等待下一個(gè)調(diào)度時(shí)機(jī)。
2.3 主要功能的實(shí)現(xiàn)
(1)任務(wù)初始化
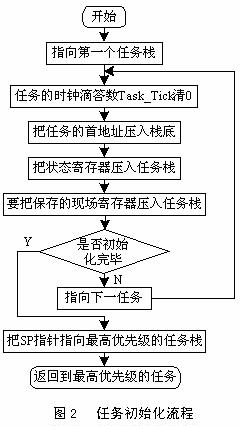
系統(tǒng)加電運(yùn)行后,首先對(duì)硬件資源進(jìn)行初始化,接著就要對(duì)多任務(wù)進(jìn)行初始化了。主要是初始化每個(gè)任務(wù)的任務(wù)棧、每個(gè)任務(wù)的時(shí)鐘滴答數(shù)和堆棧指針位置。我們把每個(gè)任務(wù)棧都初始化成圖1形式。

任務(wù)棧的初始化如下程序(r11是用來初始任務(wù)堆棧的一個(gè)指針,r10是一個(gè)循環(huán)計(jì)數(shù)器):
mov.w #(棧底 + 2) ;
r11clr.w Task_Tick(r10) :清0時(shí)鐘滴答數(shù)mov.w #任務(wù)首地址;
0(r11) :把任務(wù)地址壓入堆棧mov.w SR;
-2(r11) :把標(biāo)志寄存器放入任務(wù)棧mov.w r11;
Task_SP(r10)sub.w #現(xiàn)場(chǎng)所占的字節(jié)數(shù);
Task_SP(r10) :SP位置放:入堆棧
初始化完任務(wù)棧之后,就把堆棧指針指向最高任務(wù)優(yōu)先級(jí)任務(wù)棧的任務(wù)首地址處,再執(zhí)行ret返回。這樣,多任務(wù)就啟動(dòng)開了,程序如下:mov.w #09feh , sp ;最高優(yōu)先級(jí)的任務(wù)棧任務(wù)首地;址位置ret ;返回到最高優(yōu)先級(jí)的任務(wù)任務(wù)初始化的流程如圖2所示。
(2)時(shí)鐘節(jié)拍
時(shí)鐘節(jié)拍由MSP430F149的TimerA產(chǎn)生。TimerA工作于上升模式,CCR0中是TimerA計(jì)數(shù)最大值。TimerA初始化代碼如下:
bis.w #(TASSEL1+TACLR+MC_1),&TACTL
mov.w 2(sp),&CCR0 ;計(jì)數(shù)最大值,此值決定時(shí)鐘節(jié)拍
bis.w #CCIE,&CCTL0
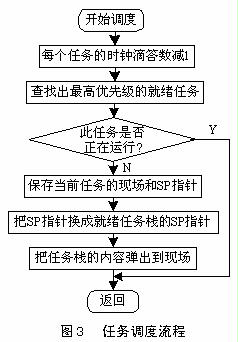
(3)任務(wù)調(diào)度
應(yīng)用程序調(diào)用OS_init進(jìn)行初始化后,直接切換到最高優(yōu)先級(jí)的任務(wù)。
每個(gè)任務(wù)在運(yùn)行一個(gè)循環(huán)后執(zhí)行OS_ Time_Dly掛起。這是通過把該任務(wù)的延時(shí)數(shù)填到該任務(wù)的Task_ Tick中,然后再執(zhí)行任務(wù)調(diào)度程序?qū)崿F(xiàn)。任務(wù)調(diào)度就是在定時(shí)中斷時(shí)對(duì)所有任務(wù)的Task_ Tick減1,然后再按優(yōu)先級(jí)高低的順序查找Task_Tick減到0的任務(wù),并直接跳到任務(wù)切換程序。下面是任務(wù)切換程序(r10的內(nèi)容是就緒任務(wù)的標(biāo)志,由調(diào)度程序找出):
pushALL ;把當(dāng)前任務(wù)現(xiàn)場(chǎng)入棧
mov.b Now_Task,r11 ;當(dāng)前任務(wù)標(biāo)志放r11
mov.w sp,Task_SP(r11) ;保存當(dāng)前任務(wù)堆棧指針
mov.b r10,Now_Task ;就緒任務(wù)標(biāo)志變?yōu)楫?dāng)前任務(wù)標(biāo)志
mov.w Task_SP(r10),sp ;就緒任務(wù)的任務(wù)棧指針放入SP;此時(shí)再進(jìn)行堆棧操作就是對(duì)就緒任務(wù)的任務(wù)棧操作了。
popALL ;把就緒任務(wù)的現(xiàn)場(chǎng)出棧
reti ;中斷返回,返回到就緒任務(wù)
任務(wù)調(diào)度的調(diào)度時(shí)機(jī)有兩種:一種是在任務(wù)掛起時(shí),一種是定時(shí)中斷。任務(wù)掛起時(shí)的任務(wù)調(diào)度一定會(huì)引起任務(wù)切換,定時(shí)中斷就不一定引起任務(wù)切換了。因?yàn)椋绻途w任務(wù)是當(dāng)前正在運(yùn)行的任務(wù)時(shí)不會(huì)引起切換。正是如此,任務(wù)調(diào)度是RTOS中執(zhí)行得最頻繁的一個(gè)功能,也是最重要的一個(gè)功能,所以必須盡量縮減其代碼量,盡量用可靠的調(diào)度算法來減少任務(wù)調(diào)度所占的時(shí)間。這個(gè)子程序的流程如圖3所示。
(4)任務(wù)鎖和其它功能的實(shí)現(xiàn)
任務(wù)的加鎖與解鎖,是為了使一些在低優(yōu)先級(jí)任務(wù)的不可重入代碼,或?qū)?a class="innerlink" href="http://forexkbc.com/tags/實(shí)時(shí)" title="實(shí)時(shí)" target="_blank">實(shí)時(shí)性要求較高的I/O操作在執(zhí)行中不產(chǎn)生任務(wù)切換。這項(xiàng)功能是通過設(shè)置一個(gè)標(biāo)志位實(shí)現(xiàn)的。當(dāng)調(diào)度程序檢查到任務(wù)被鎖定時(shí),就算有就緒任務(wù)也必須等開鎖之后才能切換。如果系統(tǒng)突然產(chǎn)生一個(gè)事件要某個(gè)掛起的任務(wù)來處理,可以在事件產(chǎn)生的程序中調(diào)用任務(wù)喚醒。它的原理是把Task_Tick清0,然后執(zhí)行一次任務(wù)調(diào)度。如果這個(gè)任務(wù)優(yōu)先級(jí)較高,就直接切換到這個(gè)任務(wù)里執(zhí)行。
3 總 結(jié)
M430/OS已在筆者開發(fā)的基于MSP430F149的系統(tǒng)上應(yīng)用,運(yùn)行穩(wěn)定可靠。該操作系統(tǒng)稍加改動(dòng),就可應(yīng)用于其它MSP430單片機(jī)。當(dāng)然,它的功能還是很有限的,也可能還存在一些尚未暴露的問題;但無論如何,它向我們證明,在MSP430單片機(jī)系統(tǒng)中使用RTOS是完全可能的。
參考文獻(xiàn)
1 Labrosse Jean J. μC/OS-II 開放源代碼的實(shí)時(shí)多任務(wù)操作系統(tǒng). 邵貝貝譯. 北京:中國(guó)電力出版社,2001
2 胡大可主編. MSP430系列超低功耗16位單片機(jī)原理與應(yīng)用. 北京:北京航空航天大學(xué)出版社,2001