
隨著現(xiàn)代測量技術(shù)的發(fā)展,對測量系統(tǒng)提出了越來越高的要求。在自動蒸餾測控系統(tǒng)中,準(zhǔn)確及時(shí)地檢測出蒸餾過程中從冷凝管餾出的第一滴液滴是獲取初餾點(diǎn)的前提;實(shí)時(shí)、準(zhǔn)確地測量出量筒中回收液體體積的變化是控制蒸餾過程中不同時(shí)段不同蒸餾速度的依據(jù)。而目前擔(dān)負(fù)著對冷凝管餾出的液滴進(jìn)行檢測、回收、計(jì)量、測速等任務(wù)的完成有諸多不盡人意的地方,需要更加完善、合理的液滴、液位檢測跟蹤控制系統(tǒng)。
從液位測量的方法看,按檢測器與液體接觸與否分為兩大類:一是接觸式測量,二是非接觸式測量。當(dāng)需要通過測量液位變化確定體積變化時(shí),一般采用非接觸式測量方法。但在大多數(shù)非接觸式測量中,液位傳感器測試范圍較大,絕對分辨率均大于0.5ml,因而在體積變化范圍為0-100ml,液位變化范圍為0-200mm時(shí),要達(dá)到0.1ml的分辨率,普通的傳感器就難以滿足要求。為此,需要研制一種測量普通100ml玻璃量筒中液體體積實(shí)時(shí)變化的高精度液位檢測系統(tǒng)。
針對以上所存在的問題,本文介紹了一種以AT89C52單片機(jī)為核心的液位檢測系統(tǒng),實(shí)現(xiàn)了對變化的液位進(jìn)行高精度體積測量的目的。
一、 積測量原理
由于量筒的容積
是確定的,且制作均勻,那么一定體積的液體在量筒內(nèi)對應(yīng)的高度也是一定的。傳感器與螺桿是相互耦合的,螺桿的頂端與步進(jìn)電機(jī)的中軸是直接相連的,步進(jìn)電機(jī)每走一步,螺桿就跟著轉(zhuǎn)一個(gè)小角度。因此,在電機(jī)步距和螺桿螺距一定的情況下,量筒的單位高度與電機(jī)步數(shù)成正比關(guān)系。于是,可將量筒內(nèi)液體的體積直接轉(zhuǎn)換成電機(jī)的步進(jìn)數(shù),即電機(jī)每走一步所代表的液體的體積是多少毫升。
體積測量示意圖如圖1所示。為了確定電機(jī)的步進(jìn)數(shù)與確定量筒內(nèi)液體的體積毫升數(shù)之間的換算關(guān)系,我們需要對此系統(tǒng)進(jìn)行校準(zhǔn),具體校準(zhǔn)的方法是:
1. 測量體積為10ml液體的電機(jī)步進(jìn)數(shù),將其值設(shè)為L1;
2. 測量體積為100ml液體的電機(jī)步進(jìn)數(shù),將其值設(shè)為L2;

根據(jù)以上步驟記錄的數(shù)據(jù),計(jì)算出電機(jī)每走一步所代表的體積毫升數(shù),將其值設(shè)為T,則有如下的計(jì)算公式:T=90/(L2-L1)。這樣就可以很方便地計(jì)算出跟蹤器所跟蹤的液體體積。
二、 硬件電路組成及原理
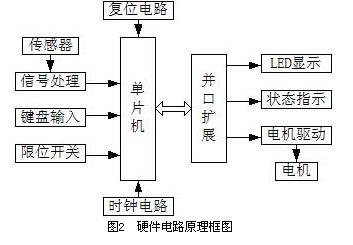
本系統(tǒng)的基本組成是:紅外光電傳感器、輸入電路、時(shí)鐘電路、復(fù)位電路、顯示電路、步進(jìn)電機(jī)及驅(qū)動電路、單片機(jī)實(shí)時(shí)處理與控制電路等。
其基本的工作原理是:紅外光電傳感器檢測到的各種信號,經(jīng)過信號處理電路后,把光信號轉(zhuǎn)換成了電信號,同時(shí)把電信號送給單片機(jī)進(jìn)行判斷和計(jì)算處理后,再發(fā)出控制指令,控制步進(jìn)電機(jī)工作,完成對變化液位的檢測與跟蹤。
該硬件電路原理框圖如圖2所示:
1、紅外光電傳感器
紅外光電傳感器是由紅外發(fā)射二極管和敏感三極管組成,紅外發(fā)射二極管發(fā)出的紅外光的波長和敏感三極管的受光波長相同或相近。當(dāng)發(fā)射管和接受管之間沒有障礙物時(shí),敏感三極管由于收到紅外光信號而導(dǎo)通,電路輸出電平為低電平;當(dāng)發(fā)射管和接受管之間有障礙物擋住時(shí),敏感三極管由于收不到紅外光信號而截止,電路輸出電平為高電平。
該系統(tǒng)中,對量筒中的液體表面的檢測基本上是利用散射原理,在玻璃量筒中液體表面處的液體會發(fā)生外延現(xiàn)象或吸附現(xiàn)象而形成一個(gè)環(huán)形曲面,這個(gè)曲面正好供我們檢測用。它是由一對紅外光電對管組成的,在玻璃量筒中液體表面處的液體會發(fā)生外延現(xiàn)象或吸附現(xiàn)象而形成一個(gè)環(huán)形曲面,由于散射作用,接收管接收不到發(fā)射管的紅外光信號而截止,電路輸出電平為高電平。因此,可以利用其輸出電平的高低來檢測液面的位置,其輸出信號再通過電纜輸出到單片機(jī)接口電路和顯示驅(qū)動電路進(jìn)行處理。為了適應(yīng)本系統(tǒng)的特殊要求,我們將紅外發(fā)射、接受管分別裝在U形板的兩邊,兩管距離大于玻璃量筒的直徑。為了減少外來自然光的干擾,在兩管的發(fā)射、接受頭安裝有一定深度的導(dǎo)光孔槽,它一方面減少了外來光的干擾,另一方面可以限制光束直徑,以利于提高檢測分辨率。
2、步進(jìn)電機(jī)及驅(qū)動電路
在步進(jìn)電機(jī)工作中,其電源大多是采用單極性直流電,通過對步進(jìn)電機(jī)的各相繞組按恰當(dāng)?shù)臅r(shí)序方式通電,就可使其執(zhí)行步進(jìn)轉(zhuǎn)動。本系統(tǒng)所用電機(jī)為四相電機(jī),當(dāng)兩相繞組通電時(shí),相應(yīng)的兩個(gè)磁極就分別形成N-S極,產(chǎn)生磁場,并與轉(zhuǎn)子形成磁路。在磁場的作用下,轉(zhuǎn)子將轉(zhuǎn)動一定的角度,使轉(zhuǎn)子齒與定子齒對齊,從而使步進(jìn)電機(jī)向前“走”一步。因此,控制電機(jī)轉(zhuǎn)動主要是按照電機(jī)轉(zhuǎn)動方向的要求,由單片機(jī)順序地輸出相應(yīng)的控制信號即可。
下面以正轉(zhuǎn)為例進(jìn)行說明,正轉(zhuǎn)時(shí),要求按ABCDA的順序依次輸出寬為8ms的正脈沖,且兩脈沖之間有一小延時(shí)。由此可以往8255的PC0~PC3口依次輸出1000、0100、0010、0001、1000等一系列的信號,每一個(gè)高電平保持8ms,輸出時(shí)間間隔為1ms,即可滿足控制需要。同理,也可以控制電機(jī)反轉(zhuǎn),只是輸出信號的順序相反。于是在寄存器中的初始控制字可設(shè)為00010001B(即11H),電機(jī)每走一步,則對此寄存器的內(nèi)容向左(正轉(zhuǎn))或向右(反轉(zhuǎn))循環(huán)移一位,然后取出此寄存器的內(nèi)容并輸出,就可以完成對電機(jī)的控制。
3、單片機(jī)實(shí)時(shí)處理及控制
針對本課題而言,硬件電路應(yīng)該盡量的簡單,部分能用軟件實(shí)現(xiàn)電路盡可能的不用硬件電路,以此來達(dá)到產(chǎn)品的小型化、價(jià)格低、性能可靠的目的。在選擇單片機(jī)時(shí)也應(yīng)充分考慮其便利和實(shí)用,8031單片機(jī)最大缺點(diǎn)是需要外接EPROM,電路復(fù)雜,而且EPROM還是用紫外線進(jìn)行擦除的,使用起來很不方便。在經(jīng)過廣泛的比較之后,確定采用ATMEL 公司的AT89C52 FLASH單片機(jī)。它不僅具有8031單片機(jī)的一切功能,還有許多功能是8031所沒有的。其內(nèi)部帶有8KB可多次擦寫的FLASH內(nèi)部程序存儲器,可用電擦除,十分方便。
AT89C52單片機(jī)主要有以下一些特點(diǎn):
(1)、與MCS-51產(chǎn)品兼容;
(2)、具有8KB可改寫的FLASH內(nèi)部程序存儲器,可進(jìn)行1000次擦/寫操作;
(
3)、全靜態(tài)操作:0Hz到24MHz;
(4)、三級程序存儲器加密;
(5)、256字節(jié)內(nèi)部RAM;
(6)、32條可編程I/O線;
(7)、3個(gè)16位定時(shí)/計(jì)數(shù)器;
(8)、8個(gè)中斷源;
(9)、可編程串行口;
(10)、低功耗空閑和掉電方式。
單片機(jī)實(shí)時(shí)處理及控制部分的主要功能是接收來自紅外光電傳感器轉(zhuǎn)換過的電信號,同時(shí)接收輸入電路送來的狀態(tài)信息,經(jīng)過判斷計(jì)算后,一方面發(fā)出控制指令,控制電機(jī)的運(yùn)轉(zhuǎn),進(jìn)行液位的檢測與跟蹤;另一方面送出所需要的數(shù)據(jù),進(jìn)行數(shù)據(jù)的顯示和狀態(tài)指示。因此,這一部分是本系統(tǒng)的關(guān)鍵部分,它的性能的好壞直接關(guān)系到整個(gè)系統(tǒng)的性能好壞。具體硬件電路是以AT89C52單片機(jī)為核心,通過擴(kuò)展并口8255來實(shí)現(xiàn)的,其電路如圖3所示。

由圖3可以看出,鍵入電路與AT89C52的P1口相連,接收所鍵入的狀態(tài)信息并送單片機(jī)。液位信號直接送P3.0口,在自動跟蹤時(shí),單片機(jī)對P3.0口不斷地查詢,一有信號就進(jìn)行判斷處理。液滴信號與P3.2口(即INT0中斷引腳)相連,由于液滴的檢測是隨時(shí)的,因此需要用中斷來控制,當(dāng)液滴信號一來中斷便響應(yīng),記錄下液滴數(shù)。上、下限位信號分別接P3.4、P3.5口,在運(yùn)行中,一但出現(xiàn)了上、下限位信號時(shí),說明已超出了預(yù)定的運(yùn)行范圍,單片機(jī)收到信號后,發(fā)出控制指令,停止電機(jī)的轉(zhuǎn)動。其它一些如顯示、電機(jī)驅(qū)動等控制信號的發(fā)出由總線分時(shí)送8255,完成預(yù)定的任務(wù)。
8255的片選信號/CS及口地址選擇線A0和A1分別由AT89C52的P2.7和P0.0、P0.1經(jīng)地址鎖存后提供,故8255的A口、B口、C口及控制口地址分別為7FFCH、7FFDH、7FFEH和7FFFH。8255的D0~D7分別與AT89C52的P0.0~P0.7相連,其/RD、/WR與AT89C52的/RD、/WR一一對應(yīng)相接。
三、 軟件設(shè)計(jì)
系統(tǒng)軟件是整個(gè)系統(tǒng)的重要組成部分,只有在它的指揮控制下硬件電路才能進(jìn)行工作,完成相應(yīng)的功能,而且部分硬件電路的缺陷還可以通過軟件編程加以彌補(bǔ)。根據(jù)系統(tǒng)的功能要求,軟件是用MCS-96匯編語言,采用模塊化結(jié)構(gòu),由主程序、自動檢測跟蹤子程序、校準(zhǔn)子程序、顯示子程序等組成。在本系統(tǒng)中,高精度測量的實(shí)現(xiàn)在很大程度上是由軟件來保證的。
主程序包括系統(tǒng)參數(shù)初始化和循環(huán)工作過程,是本系統(tǒng)中軟件部分的核心。它主要完成的任務(wù)是:首先,對單片機(jī)狀態(tài)參量和程序自定義的狀態(tài)參量進(jìn)行系統(tǒng)初始化;其次,對各子程序進(jìn)行管理和控制,安排相應(yīng)的指令,提供子程序的入口數(shù)據(jù),以達(dá)到完成系統(tǒng)功能的目的。
液位自動檢測跟蹤子程序的功能是控制液位跟蹤器以底液液面為起始位置,連續(xù)地跟蹤液面的變化,并換算出實(shí)際的液體體積值,實(shí)時(shí)地進(jìn)行顯示。其執(zhí)行步驟是:首先,紅外光電傳感器自動檢測到液位,并設(shè)此液位為跟蹤的底液面,顯示為“0”。然后,進(jìn)入實(shí)時(shí)跟蹤狀態(tài),只要液位有變化(上升),檢測器便會自動跟蹤,實(shí)時(shí)顯示所跟液體的體積,直到液位不再變化為止。
校準(zhǔn)子程序是在每次更換量筒時(shí)進(jìn)行的,目的是找出量筒內(nèi)液體的體積與電機(jī)的步進(jìn)數(shù)之間的對應(yīng)關(guān)系,然后送給單片機(jī),進(jìn)行體積計(jì)算時(shí)就有了新的標(biāo)準(zhǔn),以此來提高測量精度。
四、結(jié)束語
采用AT89C52單片機(jī)實(shí)現(xiàn)的液位檢測系統(tǒng)在標(biāo)準(zhǔn)100ml玻璃量筒中,液位變化范圍在0-200mm時(shí),能達(dá)到0.1ml的分辨率。實(shí)踐證明,本液位檢測系統(tǒng)性能價(jià)格比高、控制方式可靠,其設(shè)計(jì)思路和方法可以為自動蒸餾測控系統(tǒng)所借鑒,具有廣闊的應(yīng)用前景。