
引言
HID是高壓氣體放電燈(High Intensity Discharge)的縮寫,也可稱為重金屬燈或者氙氣大燈。與傳統(tǒng)鹵素?zé)襞菹啾龋琀ID有亮度高、壽命長(zhǎng)、省電等優(yōu)點(diǎn)。
正是由于HID具有高亮度的特點(diǎn),如果使用時(shí)照射高度調(diào)節(jié)不當(dāng),在會(huì)車時(shí)將會(huì)對(duì)迎面來車的司機(jī)造成強(qiáng)烈的眩目,產(chǎn)生安全隱患。為了規(guī)范HID前照燈的市場(chǎng),聯(lián)合國(guó)歐洲經(jīng)濟(jì)委員會(huì)(United Nations Economic Commission for Europe)在ECE-R48條款中明確規(guī)定:裝備HID前照燈的車輛必須配備能夠全自動(dòng)調(diào)節(jié)其照射高度的系統(tǒng),也可稱之為前照燈水平自動(dòng)調(diào)光系統(tǒng)。該系統(tǒng)工作時(shí),會(huì)根據(jù)車輛負(fù)載的變化自動(dòng)調(diào)整HID前燈的投射俯仰角度,確保其投射高度在合適的范圍內(nèi),既達(dá)到良好的照明效果,又不會(huì)對(duì)迎面車輛的司機(jī)造成眩目。
系統(tǒng)總體方案設(shè)計(jì)
如圖1所示,系統(tǒng)可分為三個(gè)部分,即車身高度傳感器、中央控制單元和驅(qū)動(dòng)執(zhí)行單元。系統(tǒng)運(yùn)作情況如下:該系統(tǒng)的主MCU(MC68HC908GZ60)采集車身前后軸高度傳感器的信號(hào),經(jīng)運(yùn)算后發(fā)出控制信號(hào)分別給左右前照燈的水平調(diào)光步進(jìn)電機(jī),指示
電機(jī)轉(zhuǎn)動(dòng)到指定位置,完成自動(dòng)調(diào)光。
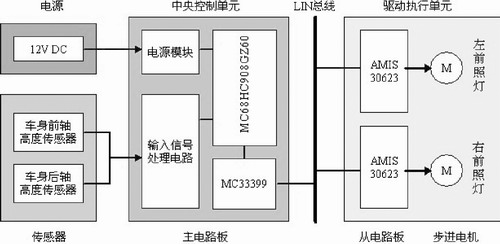
圖1 前照燈自動(dòng)調(diào)光系統(tǒng)方案設(shè)計(jì)
系統(tǒng)硬件設(shè)計(jì)
車身高度傳感器
該系統(tǒng)的主要原理是利用測(cè)定車內(nèi)兩個(gè)基準(zhǔn)點(diǎn)(約前、后軸位置)到地面的距離差得出車輛的傾斜角度信號(hào),從而進(jìn)行水平調(diào)節(jié)。可選擇光電編碼式的車高傳感器,把車身高度的變化(懸架變形量的變化)變換成傳感器軸的旋轉(zhuǎn),將檢測(cè)出的旋轉(zhuǎn)角度信號(hào)轉(zhuǎn)變?yōu)殡妷盒盘?hào)輸入MCU。實(shí)驗(yàn)中,車身高度傳感器在車左前輪和左后輪內(nèi)側(cè)各裝一個(gè)。
中央控制單元
系統(tǒng)中央控制單元采用飛思卡爾(Freescale)公司生產(chǎn)的MC68HC908GZ60芯片為主MCU,配合其他必要元件組成控制單元電路。該芯片主要特性有:8位HC08型CPU,開發(fā)資源豐富,兼容性好;片載60KB Flash EEPROM,2KB RAM;24通道A/D轉(zhuǎn)換模塊,10位精度。
此外,選擇飛思卡爾MC33399芯片與核心MCU通過SCI口相連,作為LIN總線收發(fā)器。該芯片最多可以驅(qū)動(dòng)16個(gè)節(jié)點(diǎn)。
之所以選擇LIN總線,是因?yàn)樗呀?jīng)是車用總線中較為普及的一種,它的優(yōu)點(diǎn)是芯片價(jià)格低廉,性價(jià)比高。LIN總線信號(hào)傳輸速率可達(dá)19.2kbps,一般用在對(duì)汽車安全性要求不高的控制場(chǎng)合,例如電控門窗、車燈開關(guān)控制等。
LIN總線主節(jié)點(diǎn)電路原理圖如圖2所示。
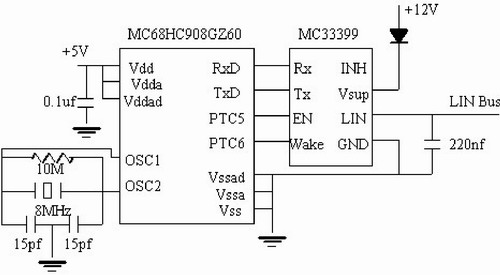
圖2 LIN總線主節(jié)點(diǎn)電路原理圖
驅(qū)動(dòng)執(zhí)行單元
驅(qū)動(dòng)執(zhí)行單元,主要是通過獲取LIN總線上的信號(hào),來控制步進(jìn)電機(jī)轉(zhuǎn)動(dòng),從而帶動(dòng)前照燈反光板沿垂直方向轉(zhuǎn)動(dòng),完成水平調(diào)光。
此處選擇了美國(guó)AMI半導(dǎo)體公司的AMIS-30623步進(jìn)電機(jī)控制芯片。該芯片屬高集成度芯片,內(nèi)建了電源模塊、控制器、LIN總線收發(fā)器和步進(jìn)電機(jī)驅(qū)動(dòng)。其主要特性有:最高峰值電流輸出達(dá)800mA;提供最高達(dá)16細(xì)分?jǐn)?shù)的步進(jìn)電機(jī)驅(qū)動(dòng);內(nèi)建加減速算法;完全兼容LIN1.3規(guī)范。
由于AMIS-30623芯片本身不可重新編程,一切操作均通過LIN總線調(diào)用其內(nèi)部函數(shù)來完成,所以使用起來十分簡(jiǎn)便。內(nèi)建的加減速算法對(duì)于控制步進(jìn)電機(jī)變速運(yùn)動(dòng)非常有效。
LIN總線從節(jié)點(diǎn)電路原理圖如圖3所示。
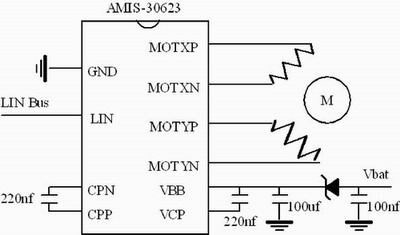
圖3 LIN總線從節(jié)點(diǎn)電路原理圖
系統(tǒng)軟件設(shè)計(jì)
軟件方面,采用1ms定時(shí)中斷采集,每次中斷到來時(shí)采取一組傳感器輸出的電壓值。經(jīng)過預(yù)判斷后,將有效數(shù)據(jù)保留,帶入公式計(jì)算,得出需要步進(jìn)電機(jī)轉(zhuǎn)動(dòng)到的目標(biāo)位置。通過LIN總線向相應(yīng)的AMIS-30623芯片發(fā)送信號(hào),控制步進(jìn)電機(jī)按加速—勻速—減速的方式平穩(wěn)運(yùn)動(dòng)到相應(yīng)位置。該程序在Freescale CodeWarrior 5.7.0環(huán)境下編譯通過。主程序流程如圖4所示。
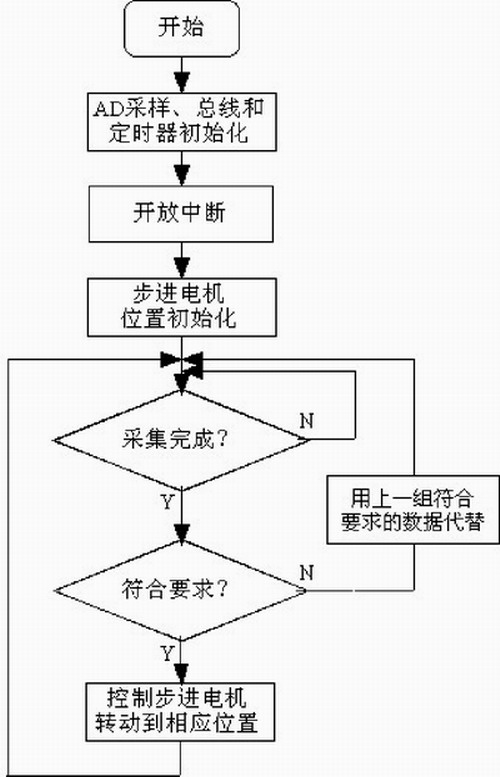
圖4 系統(tǒng)主程序流程圖
實(shí)驗(yàn)結(jié)果
為了驗(yàn)證該系統(tǒng)的動(dòng)態(tài)調(diào)光性能,在實(shí)驗(yàn)室環(huán)境下搭建了一個(gè)能夠模擬車身俯仰運(yùn)動(dòng)的實(shí)驗(yàn)平臺(tái)。實(shí)驗(yàn)過程中,控制平臺(tái)本身按一定幅度作俯仰運(yùn)動(dòng),測(cè)得調(diào)光系統(tǒng)階躍響應(yīng)時(shí)間約420ms,調(diào)整時(shí)間小于1s,穩(wěn)態(tài)誤差約0.035°,滿足了動(dòng)態(tài)自動(dòng)調(diào)光的基本要求。
結(jié)語(yǔ)
該系統(tǒng)實(shí)現(xiàn)了對(duì)汽車前照燈自動(dòng)調(diào)光的基本功能,為進(jìn)一步開發(fā)更為復(fù)雜的自適應(yīng)前照燈系(Adaptive Frontlighting System)奠定了基礎(chǔ)。
此外,該系統(tǒng)實(shí)際上是一套基于LIN總線和單片機(jī)的小功率步進(jìn)電機(jī)控制系統(tǒng)。LIN總線作為一種成本低廉、有較強(qiáng)容錯(cuò)性的局域總線,在汽車和工業(yè)控制等環(huán)境中正得到越來越廣泛地應(yīng)用。該系統(tǒng)易開發(fā)、易維護(hù)、成本低廉,可最多添加至16個(gè)子節(jié)點(diǎn),增減節(jié)點(diǎn)前后軟件方面完全兼
容,無需重新編程。因此,該設(shè)計(jì)方案在小功率步進(jìn)電機(jī)控制領(lǐng)域具有一定的推廣價(jià)值。