
隨著汽車工業(yè)的不斷發(fā)展,能源危機以及汽車尾氣對大氣環(huán)境造成的污染日趨嚴重。而發(fā)動機點火時刻的精確控制在提高汽車整體性能的同時,有效地緩解了這一狀況。與傳統(tǒng)的機械調(diào)節(jié)式點火時刻控制系統(tǒng)相比,基于微控制器的電子式控制系統(tǒng)具有及時性好、精確度高、控制靈活等優(yōu)點。為此,從發(fā)動機點火控制系統(tǒng)的控制策略出發(fā),設(shè)計了一種能提高發(fā)動機點火控制精度的新型電子點火控制裝置。
1 系統(tǒng)工作原理
發(fā)動機點火時刻是通過控制點火提前角(即點火時活塞位置到上止點曲軸轉(zhuǎn)過的角度)來實現(xiàn)的。影響火花塞點火時刻的因素主要有發(fā)動機轉(zhuǎn)速、負荷大小、發(fā)動機冷卻水溫度以及發(fā)動機缸體爆震等。
整個點火系統(tǒng)硬件電路主要由傳感器及信號調(diào)理電路、A/D轉(zhuǎn)換器、電控單元、點火電路、電源及火花塞等部分組成。系統(tǒng)原理框圖如圖1所示。
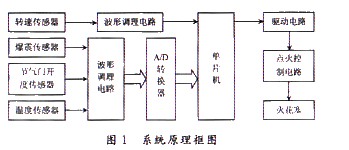
各傳感器的輸出信號經(jīng)相應(yīng)調(diào)理電路調(diào)理、A/D轉(zhuǎn)換器轉(zhuǎn)換后,送入單片機。單片機依據(jù)一定的控制策略、算法對輸入信號運算處理,依據(jù)運算結(jié)果,在合適時刻給出控制信號。控制信號經(jīng)驅(qū)動電路后,控制點火控制電路工作,通過火花塞最終實現(xiàn)發(fā)動機點火。
2 系統(tǒng)硬件設(shè)計
2.1 傳感器及其調(diào)理電路
主要包括轉(zhuǎn)速傳感器、水溫傳感器、爆震傳感器和節(jié)氣門開度傳感器及其相應(yīng)調(diào)理電路。
2.1.1 轉(zhuǎn)速傳感器及其調(diào)理電路
采用光電式轉(zhuǎn)速傳感器,其作用是測量發(fā)動機轉(zhuǎn)速和曲軸轉(zhuǎn)角位置。傳感器輸出信號經(jīng)調(diào)理電路整形、放大后號送入單片機外部計數(shù)器T0(P3.4)引腳上,由單片機在一定時間內(nèi)對其計數(shù)便可測量其轉(zhuǎn)速和曲軸位置。
2.1.2 水溫傳感器及其調(diào)理電路
采用集成溫度傳感器MAX6611測量發(fā)動機冷卻水溫度。單片機依據(jù)水溫信號對點火提前角作相應(yīng)調(diào)整:當水溫低時增大點火提前角,而水溫高時減小點火提前角。傳感器輸出信號經(jīng)二極管雙向限幅和RC濾波電路調(diào)理后接到ADC0809的信道0上。
2.1.3 爆震傳感器及其調(diào)理電路
采用安裝在發(fā)動機缸體上的壓電加速度傳感器來測量發(fā)動機爆震信號,并依據(jù)是否發(fā)生爆震而對點火提前角作相應(yīng)調(diào)整。傳感器輸出信號經(jīng)兩級濾波電路調(diào)理后接到ADC0809的信道1上。
2.1.4 節(jié)氣門開度傳感器調(diào)理電路
發(fā)動機的負荷的測量是通過線性輸出型模擬式節(jié)氣門傳感器(TPS)來實現(xiàn)的。傳感器輸出信號經(jīng)雙向限幅濾波調(diào)理電路后接到ADC0809的信道2上。
2.2 電控單元及A/D轉(zhuǎn)化電路設(shè)計
本系統(tǒng)以AT89C2051單片機作為控制器。A/D轉(zhuǎn)化器采用ADC0809對前端輸入信號進行模/數(shù)轉(zhuǎn)換。系統(tǒng)中需要進行A/D轉(zhuǎn)換的信號有水溫信號、節(jié)氣門開度信號和爆震信號。單片機與A/D轉(zhuǎn)換器的接口電路如圖2所示。
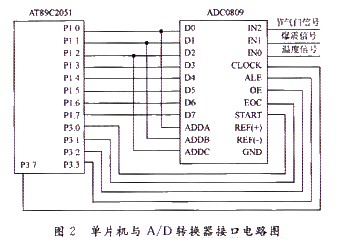
由ADDA,ADDB和ADDC選擇轉(zhuǎn)化信道,信道0輸入溫度信號、信道1輸入爆震信號、信道2輸入節(jié)氣門開度信號,轉(zhuǎn)化后的信號通過P1口輸入到單片機內(nèi)部。其中AT89C2051的P3.4(T0)對曲軸轉(zhuǎn)速信號計數(shù),確定轉(zhuǎn)速和曲軸位置。通過P3.5輸出點火控制信號。
2.3 點火控制電路設(shè)計
點火電路的作用是產(chǎn)生火花塞點火所需的高壓。其輸入是來自單片機P3.5引腳的點火控制信號,輸出端接到火花塞上。電路如圖3所示。

單片機的P3.5輸出高電平時,T1和T2都截止,12 V電壓通過R4和L1對C7充電。當單片機P3.5輸出低電平時(發(fā)出點火控制信號),T1,T2導(dǎo)通,則C7兩端的電壓立即變位低電平(即C7迅速放電),從而使流過L1的電流突變,L2兩端產(chǎn)生點火高壓。其中D1起保護T2的作用。
2.4 電源電路設(shè)計
在汽車系統(tǒng)中一般只提供12 V的直流電壓,而芯片大都需要5 V的電壓。本系統(tǒng)采用集成芯片W78L05設(shè)計了12 V到5 V的DC-DC轉(zhuǎn)換電路。
3 系統(tǒng)軟件設(shè)計
系統(tǒng)軟件主要由主程序及延時子程序、計算基本點火提前角子程序、計數(shù)T0中斷服務(wù)子程序、A/D轉(zhuǎn)化子程序、點火提前角修正子程序和點火子程序組成。本系統(tǒng)采用匯編語言編寫了源程序。
3.1 主程序
系統(tǒng)上電后,首先進行系統(tǒng)初始化(包括單片機的初始化,ADC0809的初始化,計數(shù)器T0的初始化),接著獲取轉(zhuǎn)速信號確定基本點火提前角,再進行A/D轉(zhuǎn)化采集水溫、爆震和節(jié)氣門開度信號,對采集的信號進行運算處理,最后等待點火時刻的到來并發(fā)出點火控制信號實現(xiàn)系統(tǒng)點火。
3.2 計算基本點火提前角子程序
本系統(tǒng)的基本點火提前角由轉(zhuǎn)速信號確定,采用查表法確定基本點火提前角。首先建立兩個數(shù)據(jù)表,一為轉(zhuǎn)速表v(v[0],v[1],v[2],…,v[i],v[i+1],…)和基本點火提前角表。兩表中的元素個數(shù)相等,且都以升序排序。Vi對應(yīng)的基本點火提前為基本點火提前角表中的第i個元素。為了減少查找的次數(shù),設(shè)計時采用了二分法對轉(zhuǎn)速表進行檢索。
3.3 水溫對點火提前角修正子程序
水溫對點火提前角進行雙重修正,即暖機修正和過熱修正。當水箱溫度過低,應(yīng)加大點火提前角,即進行暖機修正。當發(fā)動機水箱溫度過高,應(yīng)減小點火提前角,即進行過熱修正。
本設(shè)計中水溫對點火提前角修正也采用查表法,建立2個修正表:過熱修正表(升序表)和暖機修正表(降序表)。根據(jù)經(jīng)驗水溫對點火提前角最大修正5°,采用直接查找法。首先確定對點火提前角零修正的水溫T,測得的水溫t大于T則查找過熱修正表進行過熱修正,否則查找暖機修正表進行暖機修正。
3.4 爆震信號對點火提前角修正子程序
系統(tǒng)對點火提前角修正是為了使發(fā)動機始終接近爆震臨界狀態(tài),即處于一種“臨界控制”方式,使發(fā)動機既接近爆震區(qū)又不進入爆震區(qū),此時缸內(nèi)燃燒的熱效率最高。測到有爆震信號點火提前角增加2°,測得無爆震信號時點火提前角減小2°。設(shè)臨界狀態(tài)對應(yīng)的爆震信號為F,當測得的爆震信號f大于F時點火提前角減2°,否則點火提前角加2°。
另外,節(jié)氣門開度對點火提前角修正子程序采用直接查表法。
4 結(jié)語
本點火裝置具有及時性高、控制精度高等優(yōu)點,實現(xiàn)了對點火提前角的優(yōu)化控制。該系統(tǒng)已調(diào)試成功。