
基于OMAP3的視頻解碼器的通用解碼方案
來源:單片機與嵌入式系統(tǒng)
王偉 劉培德
山東經(jīng)濟學(xué)院
摘要: 本文以O(shè)MAP3530為例,分析了0MAP平臺的硬件結(jié)構(gòu)與軟件編程特點;總結(jié)了TI公司提供的專用圖像圖形處理庫(IMGLIB)的使用技巧,并與OMAPl510進行了部分比較;在流行的視頻編解碼標準的基礎(chǔ)上,提出了基于OMAP3的視頻解碼器的通用解碼方案。
Abstract:
Key words :
本文以O(shè)MAP3530為例,分析了0MAP平臺的硬件結(jié)構(gòu)與軟件編程特點;總結(jié)了TI公司提供的專用圖像圖形處理庫(IMGLIB)的使用技巧,并與OMAPl510進行了部分比較;在流行的視頻編解碼標準的基礎(chǔ)上,提出了基于OMAP3的視頻解碼器的通用解碼方案。
1 OMAP平臺簡介
開放式多媒體應(yīng)用平臺OMAP結(jié)合高性能、低功耗的DSP核與控制性能強大的ARM內(nèi)核,是一種開放式的、可編程的體系結(jié)構(gòu),目前主要有OMAP1X、OMAP2X和OMAP3X系列。以O(shè)MAP3530為例,硬件結(jié)構(gòu)如圖1所示。

1.1 OMAP3530的硬件平臺
0MAP3530的硬件平臺主要由ARM內(nèi)核、DSP內(nèi)核以及流量控制器(Traffic Controler,TC)組成。
(1)ARM內(nèi)核
OMAP3530采用ARM Cortex-A8核,工作主頻最高可達720 MHz。它包括存儲器管理單元、16 KB的高速指令緩沖存儲器、16 KB的數(shù)據(jù)高速緩沖存儲器和256K字的二級Cache;片內(nèi)有64 KB的內(nèi)部SRAM,為液晶顯示等應(yīng)用提供了大量的數(shù)據(jù)和代碼存儲空間。CortexA8內(nèi)核采用13級流水線、32位的RISC處理器架構(gòu)。系統(tǒng)中的控制寄存器對MMU、Cache和讀寫緩存控制器進行存取操作。ARM內(nèi)核具有整個系統(tǒng)的控制權(quán),可以設(shè)置DSP、TC以及各種外設(shè)的時鐘及其他工作參數(shù),控制DSP的運行停止。OMAP3530平臺可支持包含繪圖、多媒體內(nèi)容和Java程序的先進應(yīng)用。
(2)DSP內(nèi)核
TMS320C64X+內(nèi)核具有最佳的功耗性能比,工作主頻最高為520 MHz;它具有高度的并行能力,32位讀寫和功能強大的EMIF,雙流水線的獨立操作以及雙MAC的運算能力。它采用3項關(guān)鍵的革新技術(shù):增大的空閑省電區(qū)域、變長指令和擴大的并行機制。其結(jié)構(gòu)針對多媒體應(yīng)用高度優(yōu)化,適合低功耗的實時語音圖像處理。另外,TMS320C64X+內(nèi)核增加了固化了算法的硬件加速器,來處理運動估計、8×8的DCT/IDCT和1/2像素插值,降低了視頻處理的功耗。
(3)流量控制器
流量控制器TC用于控制ARM、DSP、DMA以及本地總線對OMAP3530內(nèi)所有存儲器(包括SRAM,SDRAM、Flash和ROM等)的訪問。
OMAP3530具有豐富的外圍接口,如液晶控制器、存儲器接口、攝像機接口、空中接口、藍牙接口、通用異步收發(fā)器、I2C主機接口、脈寬音頻發(fā)生器、串行接口、主客戶機USB口、安全數(shù)字多媒體卡控制器接口、鍵盤接口等。這些豐富的外圍接口使應(yīng)用OMAP的系統(tǒng)具有更大的靈活性和可擴展性。
1.2 OMAP3530的軟件平臺
利用OMAP可以建立兩個操作系統(tǒng):基于ARM的操作系統(tǒng)(如WinCE、Linux等),以及基于DSP的DSP/BIOS。連接兩個操作系統(tǒng)使用的核心技術(shù)是DSP/BIOS橋。0MAP支持多種實時多任務(wù)操作系統(tǒng)在ARM微處理器上工作,用來對ARM微處理器進行實時多任務(wù)調(diào)度管理,對TMS320C64X+進行控制和通信;同時,支持多種實時多任務(wù)操作系統(tǒng)在TMS320C64X+上工作,實現(xiàn)復(fù)雜的多媒體信號處理。DSP/BIOS橋包含DSP管理器、DSP管理服務(wù)器、DSP和外圍接口鏈接驅(qū)動器。DSP/BIOS橋提供運行在Cortex-A8上的應(yīng)用程序和運行TMS320C64X+上的算法之間的通信管理服務(wù)。開發(fā)者可以利用DSP/BIOS橋中的應(yīng)用編程接口控制在DSP中實時任務(wù)的執(zhí)行,并同DSP交換任務(wù)運行結(jié)果和狀態(tài)消息。在這個環(huán)境下,開發(fā)者可以調(diào)用局部DSP網(wǎng)關(guān)組件來實現(xiàn)諸如視頻、音頻和語音等功能。因此,開發(fā)者不需要了解DSP和DSP/BIOS橋,就能開發(fā)新的應(yīng)用軟件。使用標準應(yīng)用編程接口開發(fā)的應(yīng)用軟件,與基于0MAP的未來無線設(shè)備兼容。
2 視頻編碼標準與OMAP圖形圖像庫應(yīng)用
2.1 視頻編碼標準
從1988年開始,ISO/IEC MPEG和ITU-T針對不同的應(yīng)用制訂了一系列視頻編碼國際標準。MPEG的有MPEG-1、MPEG-2、MPEG-4標準,ITU-T的有H.261、H.263、H_263+/H.263++以及H.264標準。2001年12月,ISO和ITU-T正式成立聯(lián)合視頻小組(Joint Video Team,JVT)共同制定新的H.264編碼標準。2002年6月,我國信息產(chǎn)業(yè)部制訂了我國的數(shù)字音視頻編碼技術(shù)標準(Audio-Video Coding Standard,AVS)。AVS是我國具備自主知識產(chǎn)權(quán)的第二代信源編碼標準。與目前比較流行的標準(如MPEG-2、MPEG-4、H.263、H.264)相比,從編碼效率來看,MPEG-4是MPEG-2的1.4倍,AVS和H.264都是MPEG-2的2倍以上;從算法復(fù)雜度上來看,H.264的算法在編碼端比MPEG-2復(fù)雜4~5倍,在解碼端復(fù)雜2~3倍,而AVS在復(fù)雜度上比H.264有較大幅度降低,且不需要交納高昂的專利費用。
目前,應(yīng)用比較廣泛的視頻編碼標準中,基本上都有如下的步驟:將圖像序列編碼為幀內(nèi)模式和幀問模式兩種,并且分別進行編碼。采用幀內(nèi)編碼時,直接對8×8的像素塊進行DCT變換,然后將量化系數(shù)進行變長編碼后形成輸出碼流;另一路經(jīng)反量化、反DCT變換后形成恢復(fù)圖像,直接存入幀存儲器。采用幀間編碼時,對原始數(shù)據(jù)的每個塊先進行運動估計,并與經(jīng)運動估計后的預(yù)測圖像相減,產(chǎn)生差分圖像,接著進行DCT變換和量化,并同運動矢量數(shù)據(jù)一起編碼形成碼流;另一路經(jīng)反量化、反DCT變換后形成恢復(fù)圖像,存入幀存儲器,用于下一步的運動估計。
不同的標準具有各自的特點,例如MPEGl與H.261采用整像素,MPEG4和H.263采用半像素,H.264與AVS采用1/4至1/8像素精度的運動估計,H.261采用單參考幀,H.264與AVS采用多參考幀等。特別是目前的H.264標準,采用整數(shù)DCT/IDCT、幀內(nèi)預(yù)測、多模式運動估計、去塊效應(yīng)濾波器等先進技術(shù),造成了極大的算法復(fù)雜度,對硬件實時解碼提供了很高的要求。
2.2 OMAP圖形圖像庫(IMGLIB)應(yīng)用
針對圖像與視頻處理的需要,TI提供了IMGLIB庫供C程序調(diào)用。庫里內(nèi)容主要有2部分:
①硬件加速部分。由匯編語言編寫,但是計算由硬件的加速模塊來實現(xiàn),無法修改。例如DCT/IDCT都是針對8×8塊進行的,變換矩陣已經(jīng)固定,硬件加速指令共有16種,其中DCT/IDCT各1條,運動估計指令10條,插值指令4條。
②軟件加速部分。用匯編語言編寫,包括矩陣量化反量化、JPEG變長編碼、一維/二維離散小波變換反變換及小波包變換反變換,以及圖像的直方圖計算、邊緣檢測、帶移位操作的3×3掩模操作等。這些軟件加速指令都提供了標準的C接口,用戶可以直接調(diào)用,也可以模仿編寫規(guī)則編譯生成自己的庫文件。
0MAP3530的硬件平臺主要由ARM內(nèi)核、DSP內(nèi)核以及流量控制器(Traffic Controler,TC)組成。
(1)ARM內(nèi)核
OMAP3530采用ARM Cortex-A8核,工作主頻最高可達720 MHz。它包括存儲器管理單元、16 KB的高速指令緩沖存儲器、16 KB的數(shù)據(jù)高速緩沖存儲器和256K字的二級Cache;片內(nèi)有64 KB的內(nèi)部SRAM,為液晶顯示等應(yīng)用提供了大量的數(shù)據(jù)和代碼存儲空間。CortexA8內(nèi)核采用13級流水線、32位的RISC處理器架構(gòu)。系統(tǒng)中的控制寄存器對MMU、Cache和讀寫緩存控制器進行存取操作。ARM內(nèi)核具有整個系統(tǒng)的控制權(quán),可以設(shè)置DSP、TC以及各種外設(shè)的時鐘及其他工作參數(shù),控制DSP的運行停止。OMAP3530平臺可支持包含繪圖、多媒體內(nèi)容和Java程序的先進應(yīng)用。
(2)DSP內(nèi)核
TMS320C64X+內(nèi)核具有最佳的功耗性能比,工作主頻最高為520 MHz;它具有高度的并行能力,32位讀寫和功能強大的EMIF,雙流水線的獨立操作以及雙MAC的運算能力。它采用3項關(guān)鍵的革新技術(shù):增大的空閑省電區(qū)域、變長指令和擴大的并行機制。其結(jié)構(gòu)針對多媒體應(yīng)用高度優(yōu)化,適合低功耗的實時語音圖像處理。另外,TMS320C64X+內(nèi)核增加了固化了算法的硬件加速器,來處理運動估計、8×8的DCT/IDCT和1/2像素插值,降低了視頻處理的功耗。
(3)流量控制器
流量控制器TC用于控制ARM、DSP、DMA以及本地總線對OMAP3530內(nèi)所有存儲器(包括SRAM,SDRAM、Flash和ROM等)的訪問。
OMAP3530具有豐富的外圍接口,如液晶控制器、存儲器接口、攝像機接口、空中接口、藍牙接口、通用異步收發(fā)器、I2C主機接口、脈寬音頻發(fā)生器、串行接口、主客戶機USB口、安全數(shù)字多媒體卡控制器接口、鍵盤接口等。這些豐富的外圍接口使應(yīng)用OMAP的系統(tǒng)具有更大的靈活性和可擴展性。
1.2 OMAP3530的軟件平臺
利用OMAP可以建立兩個操作系統(tǒng):基于ARM的操作系統(tǒng)(如WinCE、Linux等),以及基于DSP的DSP/BIOS。連接兩個操作系統(tǒng)使用的核心技術(shù)是DSP/BIOS橋。0MAP支持多種實時多任務(wù)操作系統(tǒng)在ARM微處理器上工作,用來對ARM微處理器進行實時多任務(wù)調(diào)度管理,對TMS320C64X+進行控制和通信;同時,支持多種實時多任務(wù)操作系統(tǒng)在TMS320C64X+上工作,實現(xiàn)復(fù)雜的多媒體信號處理。DSP/BIOS橋包含DSP管理器、DSP管理服務(wù)器、DSP和外圍接口鏈接驅(qū)動器。DSP/BIOS橋提供運行在Cortex-A8上的應(yīng)用程序和運行TMS320C64X+上的算法之間的通信管理服務(wù)。開發(fā)者可以利用DSP/BIOS橋中的應(yīng)用編程接口控制在DSP中實時任務(wù)的執(zhí)行,并同DSP交換任務(wù)運行結(jié)果和狀態(tài)消息。在這個環(huán)境下,開發(fā)者可以調(diào)用局部DSP網(wǎng)關(guān)組件來實現(xiàn)諸如視頻、音頻和語音等功能。因此,開發(fā)者不需要了解DSP和DSP/BIOS橋,就能開發(fā)新的應(yīng)用軟件。使用標準應(yīng)用編程接口開發(fā)的應(yīng)用軟件,與基于0MAP的未來無線設(shè)備兼容。
2 視頻編碼標準與OMAP圖形圖像庫應(yīng)用
2.1 視頻編碼標準
從1988年開始,ISO/IEC MPEG和ITU-T針對不同的應(yīng)用制訂了一系列視頻編碼國際標準。MPEG的有MPEG-1、MPEG-2、MPEG-4標準,ITU-T的有H.261、H.263、H_263+/H.263++以及H.264標準。2001年12月,ISO和ITU-T正式成立聯(lián)合視頻小組(Joint Video Team,JVT)共同制定新的H.264編碼標準。2002年6月,我國信息產(chǎn)業(yè)部制訂了我國的數(shù)字音視頻編碼技術(shù)標準(Audio-Video Coding Standard,AVS)。AVS是我國具備自主知識產(chǎn)權(quán)的第二代信源編碼標準。與目前比較流行的標準(如MPEG-2、MPEG-4、H.263、H.264)相比,從編碼效率來看,MPEG-4是MPEG-2的1.4倍,AVS和H.264都是MPEG-2的2倍以上;從算法復(fù)雜度上來看,H.264的算法在編碼端比MPEG-2復(fù)雜4~5倍,在解碼端復(fù)雜2~3倍,而AVS在復(fù)雜度上比H.264有較大幅度降低,且不需要交納高昂的專利費用。
目前,應(yīng)用比較廣泛的視頻編碼標準中,基本上都有如下的步驟:將圖像序列編碼為幀內(nèi)模式和幀問模式兩種,并且分別進行編碼。采用幀內(nèi)編碼時,直接對8×8的像素塊進行DCT變換,然后將量化系數(shù)進行變長編碼后形成輸出碼流;另一路經(jīng)反量化、反DCT變換后形成恢復(fù)圖像,直接存入幀存儲器。采用幀間編碼時,對原始數(shù)據(jù)的每個塊先進行運動估計,并與經(jīng)運動估計后的預(yù)測圖像相減,產(chǎn)生差分圖像,接著進行DCT變換和量化,并同運動矢量數(shù)據(jù)一起編碼形成碼流;另一路經(jīng)反量化、反DCT變換后形成恢復(fù)圖像,存入幀存儲器,用于下一步的運動估計。
不同的標準具有各自的特點,例如MPEGl與H.261采用整像素,MPEG4和H.263采用半像素,H.264與AVS采用1/4至1/8像素精度的運動估計,H.261采用單參考幀,H.264與AVS采用多參考幀等。特別是目前的H.264標準,采用整數(shù)DCT/IDCT、幀內(nèi)預(yù)測、多模式運動估計、去塊效應(yīng)濾波器等先進技術(shù),造成了極大的算法復(fù)雜度,對硬件實時解碼提供了很高的要求。
2.2 OMAP圖形圖像庫(IMGLIB)應(yīng)用
針對圖像與視頻處理的需要,TI提供了IMGLIB庫供C程序調(diào)用。庫里內(nèi)容主要有2部分:
①硬件加速部分。由匯編語言編寫,但是計算由硬件的加速模塊來實現(xiàn),無法修改。例如DCT/IDCT都是針對8×8塊進行的,變換矩陣已經(jīng)固定,硬件加速指令共有16種,其中DCT/IDCT各1條,運動估計指令10條,插值指令4條。
②軟件加速部分。用匯編語言編寫,包括矩陣量化反量化、JPEG變長編碼、一維/二維離散小波變換反變換及小波包變換反變換,以及圖像的直方圖計算、邊緣檢測、帶移位操作的3×3掩模操作等。這些軟件加速指令都提供了標準的C接口,用戶可以直接調(diào)用,也可以模仿編寫規(guī)則編譯生成自己的庫文件。
在視頻編解碼過程中,運動估計、DCT/IDCT和像素插值占據(jù)了大量的運算時間,0MAP平臺提供的硬件加速單元可以高效地完成上述運算,而幾乎不占用CPU時鐘(這里,不占用是指運算過程,實際上數(shù)據(jù)的輸入輸出仍需要花費少量時間);同時,優(yōu)化的軟件加速單元也可以較快地完成運算。以DCT/IDCT為例,耗時情況如表1所列。

由表1可知,硬件DCT耗時約為軟件DCT的1/7,硬件IDCT耗時約為軟件IDCT的1/4.5。因此,采用硬件加速模塊可以極大地提高運算速度并降低功耗。
對于最新的H.264以及AVS標準,需要采用OMAP3530才能發(fā)揮0MAP系列的硬件加速優(yōu)勢。OMAP3530的硬件加速器集成了加速模塊的半像素插值,采用的整數(shù)DCT/IDCT類變換硬件加速模塊,而且集成了去塊效應(yīng)濾波器。在通用計算機上,H.264的解碼過程中各部分所需的時間如表2所列。

從表2中可以看出,在H.264的解碼過程中,環(huán)路濾波、插值以及反變換反量化占據(jù)了超過70%的計算時間。因此,用0MAP3530來進行H.264以及AVS的解碼時,如果能有效地利用0MAP3530的硬件加速資源,可以提高計算效率,實現(xiàn)實時解碼。另外,除了硬件加速器之外,0MAP3530的體系結(jié)構(gòu)比較適合于視頻處理,這主要基于以下考慮:
①目前市場上推出的整合了ARM與DSP的多媒體專用芯片并不多,OMAP可以使用單一芯片實現(xiàn)嵌入式操作系統(tǒng)(Linux、WinCE等)的功能,并且可以獲得TI廣大的第三方提供的豐富的算法支持。基于操作系統(tǒng)的編程更靈活方便,便于產(chǎn)品的軟件升級。相比之下,單一的DSP無法實現(xiàn)操作系統(tǒng)的功能,若額外采用ARM構(gòu)建操作系統(tǒng),成本以及硬件軟件復(fù)雜度無疑會大于采用OMAP平臺。
②功耗的考慮。表3列出了OMAPl510上運行MPEG4解碼時的功耗情況。

可以看出,在OMAPl510平臺上,對于QCIF(常用的標準化圖像格式)、15 fps的應(yīng)用來說,功耗在9.9~28.5mW。對于常見的650 mAh時的手機電池,大概可以連續(xù)工作34~59小時,這對一般的應(yīng)用來說顯然是夠用的。而TI的另一款專用多媒體處理芯片DM642,其功耗為1.5W,是OMAP的50~150倍。對于便攜式的多媒體終端而言,由于并不需要太高的運算處理能力,采用OMAP平臺既能滿足需要,又可以節(jié)約電池電力。
③速度的考慮。TMS320C64X+最多可以并行執(zhí)行8條指令,所以理論上的最大速度是4 160 MIPS(520MHz)。這一點相比目前最快的多媒體處理芯片DM642(4 800 MIPS,600 MHz)來說稍低,但兩者的目標定位不同。DM642主要用于實時編碼等對速度要求較高的場合,而0MAP主要用于手持設(shè)備的解碼。以H.264算法的Base Profilc為例,復(fù)雜度比MPEG-4高20%~30%。對于MPEG4,在QCIF、15 fps下需要28 MIPS;對應(yīng)的H.264算法的Base Profile要求40 MIPS的運算速度。
④程序結(jié)構(gòu)的考慮。DSP的片內(nèi)內(nèi)存速度最快,但是非常有限,所以必須將片外的數(shù)據(jù)倒入內(nèi)存。由于目前的編碼方式全都是采用基于宏塊的,每個宏塊至多16×16,所以比較通用的辦法是采用,DMA方式將要用到的數(shù)據(jù)提前倒入片內(nèi)。DMA傳送速度很快,所以可以并行也可以串行傳送。
⑤軟件加速的考慮。可以仿照IMGLIB的編寫規(guī)則用匯編語言對耗時最多的部分進行重寫,同時結(jié)合TI公司的數(shù)據(jù)手冊進行C語言級以及匯編級的程序優(yōu)化。由于TI公司編譯器的編譯效率一直在提高,從通用及可讀性的角度上講,推薦采用C語言。
3 實時視頻解碼在OMAP上的軟件實現(xiàn)
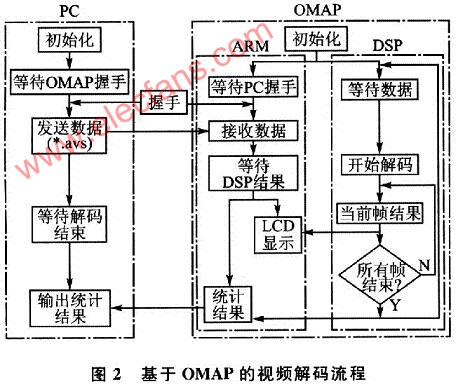
在OMAP上開發(fā)程序通常分為兩部分:ARM端負責(zé)控制、顯示等;DSP端負責(zé)數(shù)據(jù)處理。采用TI公司提供的DSP開發(fā)工具CCS在這兩端分別開發(fā),視頻解碼流程如圖2所示。
⑤軟件加速的考慮。可以仿照IMGLIB的編寫規(guī)則用匯編語言對耗時最多的部分進行重寫,同時結(jié)合TI公司的數(shù)據(jù)手冊進行C語言級以及匯編級的程序優(yōu)化。由于TI公司編譯器的編譯效率一直在提高,從通用及可讀性的角度上講,推薦采用C語言。
3 實時視頻解碼在OMAP上的軟件實現(xiàn)
在OMAP上開發(fā)程序通常分為兩部分:ARM端負責(zé)控制、顯示等;DSP端負責(zé)數(shù)據(jù)處理。采用TI公司提供的DSP開發(fā)工具CCS在這兩端分別開發(fā),視頻解碼流程如圖2所示。
ARM端:初始化整個OMAP3530芯片,包括ARM、DSP、TC等的時鐘設(shè)置,DSP的開啟關(guān)閉以及復(fù)位,LCD、定時器等各個外設(shè)的初始化。在啟動完成后,ARM內(nèi)核就一直查詢共享內(nèi)存中的某一標志位,當(dāng)查詢到一幀解碼結(jié)束時,就啟動LCD專用DMA,在LCD上進行顯示。
DSP端:負責(zé)壓縮的解碼。將壓縮碼流放置在SDRAM中。與基于PC的解碼程序的主要區(qū)別在于,由于DSP的片內(nèi)內(nèi)存有限,所以不可能將當(dāng)前幀以及參考幀都放在片內(nèi),所以以宏塊為單位在SDRAM與片內(nèi)內(nèi)存之間進行數(shù)據(jù)傳遞。另外,由于在液晶屏上顯示時需要轉(zhuǎn)換成RGB圖像,所以,在每一幀結(jié)束后都要通過YUV轉(zhuǎn)RGB來實現(xiàn)實時顯示。
4 實驗結(jié)果
在0MAP3530平臺上實現(xiàn)了AVS解碼,表4給出了OMAP3530上的實驗數(shù)據(jù)。

結(jié)語
TI公司提出的0MAP體系結(jié)構(gòu)開放性好,在這種體系結(jié)構(gòu)下編寫的程序移植方便,適合于多媒體平臺的應(yīng)用。越來越多的廠商選用OMAP芯片作為移動多媒體視頻的載體,OMAP與流行的視頻標準的結(jié)合在移動通信與多媒體信號處理方面也將有良好的應(yīng)用前景。
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。