
摘 要: 介紹了作為泛計算領(lǐng)域重要組成部分的汽車嵌入式系統(tǒng)" title="嵌入式系統(tǒng)">嵌入式系統(tǒng)由低端到高端的發(fā)展歷程和各個階段的主要特點,詳細論述了嵌入式SoC系統(tǒng)應(yīng)用于汽車電子" title="汽車電子">汽車電子方面的新理論、新方法和關(guān)鍵技術(shù),并對汽車嵌入式SoC系統(tǒng)的發(fā)展趨勢進行了展望。
關(guān)鍵詞: 泛計算 嵌入式系統(tǒng) 汽車電子 SoC
嵌入式系統(tǒng)是泛計算領(lǐng)域的重要組成部分,是嵌入到對象宿主體系中完成某種特定功能的專用計算機系統(tǒng)[1]。嵌入式系統(tǒng)有體積小、低功耗、集成度高、子系統(tǒng)間能通信融合的優(yōu)點。隨著汽車技術(shù)的發(fā)展以及微處理器技術(shù)的不斷進步,在汽車電子技術(shù)中得到了廣泛應(yīng)用。目前,從車身控制、底盤控制、發(fā)動機管理、主被動安全系統(tǒng)到車載娛樂、信息系統(tǒng)都離不開嵌入式技術(shù)的支持。
1 汽車嵌入式系統(tǒng)發(fā)展歷程
嵌入式系統(tǒng)誕生于微型機時代,經(jīng)歷了漫長的獨立發(fā)展的單片機道路[2]。嵌入式系統(tǒng)的核心是嵌入式微處理器。與嵌入式微處理器的發(fā)展類似,汽車嵌入式系統(tǒng)也可以分為三個發(fā)展階段:
第一階段:SCM(Single Chip Microcomputer)系統(tǒng)。以4位和低檔8位微處理器為核心,將CPU和外圍電路集成到一個芯片上,配置了外部并行總線、串行通訊接口、SFR模塊和布爾指令系統(tǒng)。硬件結(jié)構(gòu)和功能相對單一、處理效率低、存儲容量小、軟件結(jié)構(gòu)也比較簡單,不需要嵌入操作系統(tǒng)。這種底層的汽車SCM系統(tǒng)主要用于任務(wù)相對簡單、數(shù)據(jù)處理量小和實時性" title="實時性">實時性要求不高的控制場合,如雨刷、車燈系統(tǒng)、儀表盤以及電動門窗等。
第二階段:MCU(Micro Controller Unit)系統(tǒng)。以高檔的8位和16位處理器為核心,集成了較多外部接口功能單元,如A/D轉(zhuǎn)換、PWM、PCA、Watchdog、高速I/O口等,配置了芯片間的串行總線;軟件結(jié)構(gòu)比較復雜,程序數(shù)據(jù)量有明顯增加。第二代汽車嵌入式系統(tǒng)能夠完成簡單的實時任務(wù),目前在汽車電控系統(tǒng)中得到了最廣泛的應(yīng)用,如ABS系統(tǒng)、智能安全氣囊、主動懸架以及發(fā)動機管理系統(tǒng)等。
第三階段:SoC(System of Chips)系統(tǒng)。以性能極高的32位甚至64位嵌入式處理器為核心,在對海量離散時間信號要求快速處理的場合使用DSP作為協(xié)處理器。為滿足汽車系統(tǒng)不斷擴展的嵌入式應(yīng)用需求,不斷提高處理速度,增加存儲容量與集成度。在嵌入式操作系統(tǒng)的支持下具有實時多任務(wù)" title="多任務(wù)">多任務(wù)處理能力,同時與網(wǎng)絡(luò)的耦合更為緊密[3]。汽車SoC系統(tǒng)是嵌入式技術(shù)在汽車電子上的高端應(yīng)用,滿足了現(xiàn)代汽車電控系統(tǒng)功能不斷擴展、邏輯漸趨復雜、子系統(tǒng)間通信頻率不斷提高的要求,代表著汽車電子技術(shù)的發(fā)展趨勢。汽車嵌入式SoC系統(tǒng)主要應(yīng)用在混合動力總成、底盤綜合控制、汽車定位導航、車輛狀態(tài)記錄與監(jiān)控等領(lǐng)域。
2 汽車嵌入式SoC系統(tǒng)
2.1 技術(shù)特點
汽車嵌入式SoC系統(tǒng)是嵌入式系統(tǒng)向?qū)崟r多任務(wù)管理、網(wǎng)絡(luò)耦合與通信的高端應(yīng)用過渡的產(chǎn)物,大大提高了汽車電子系統(tǒng)的實時性、可靠性和智能化程度。除了具備普通嵌入式系統(tǒng)的共有特性之外,它還具有以下幾個優(yōu)點:
(1)對實時多任務(wù)處理有很強的支持能力,中斷響應(yīng)時間1~2μs;
(2)具有很強的存儲區(qū)保護功能;
(3)在嵌入式實時操作系統(tǒng)的支持下能合理進行任務(wù)調(diào)度,充分利用系統(tǒng)資源;
(4)硬件結(jié)構(gòu)和軟件功能都有很強的擴展能力,系統(tǒng)集成度大大提高,降低了成本;
(5)超低功耗,汽車靜態(tài)功耗為毫瓦級;
(6)系統(tǒng)硬件抗干擾能力增強,適應(yīng)高溫、潮濕、振動和電磁輻射等各種工作環(huán)境;
(7)實時操作系統(tǒng)支持軟件多線程結(jié)構(gòu),增強了系統(tǒng)的軟件抗干擾性;
(8)提供強大的網(wǎng)絡(luò)通信功能,具備IEEE1394、USB、CAN、Bluetooth或IrDA通信接口,支持相應(yīng)的通信組網(wǎng)協(xié)議軟件和物理層驅(qū)動軟件,提供容錯數(shù)據(jù)傳輸能力和更大通信帶寬。
2.2 系統(tǒng)結(jié)構(gòu)
汽車嵌入式SoC系統(tǒng)由硬件和軟件兩大部分組成。硬件包括嵌入式處理器和外圍設(shè)備,軟件包括應(yīng)用軟件和操作系統(tǒng)。軟件通過數(shù)據(jù)結(jié)構(gòu)、算法和通訊協(xié)議實現(xiàn)汽車電子控制策略,硬件則為軟件提供了運行平臺,執(zhí)行具體控制。
汽車嵌入式SoC硬件系統(tǒng)集成度越來越高,一般為模塊化結(jié)構(gòu),如圖1(a)所示。在高性能CPU核心外通過IP總線擴展實時時鐘模塊、SRAM(靜態(tài)隨機存儲器)及大容量FLASH,配置CAN總線與USB通信模塊,無縫集成PWM輸出、多通道串口、A/D轉(zhuǎn)換接口與統(tǒng)一的高速緩沖存儲器,支持RISC技術(shù)、多級流水線技術(shù)與在片調(diào)試技術(shù)。系統(tǒng)的實時處理能力、可靠性和網(wǎng)絡(luò)通信能力大大增強[4]。

現(xiàn)代汽車電子系統(tǒng)從單一控制逐漸發(fā)展到多變量多任務(wù)協(xié)調(diào)控制,軟件越來越龐大,越來越復雜,使得汽車嵌入式系統(tǒng)需要尋找新的軟件解決方案。圖1(b)描述了汽車嵌入式SoC系統(tǒng)軟件的典型結(jié)構(gòu)。它采用基于標準化接口和通訊協(xié)議的模塊化軟件設(shè)計,系統(tǒng)內(nèi)部通訊由交互層直接完成,保障應(yīng)用程序間的信息傳送。網(wǎng)絡(luò)層擁有數(shù)據(jù)流處理能力,是不同系統(tǒng)層面間信息交換的中間接口,能最大程度地整合系統(tǒng)資源。嵌入式實時操作系統(tǒng)摒棄了傳統(tǒng)操作系統(tǒng)的前后臺模式,使用總線驅(qū)動層和硬件抽象層管理I/O端口,合理分配CPU資源,采用基于優(yōu)先級的事件管理策略,通過API(應(yīng)用程序接口)調(diào)用應(yīng)用程序,根據(jù)郵箱、消息隊列和信號量機制綜合管理中斷、系統(tǒng)行為和任務(wù)。
2.3 常用的SoC系統(tǒng)平臺
為適應(yīng)汽車電子系統(tǒng)的發(fā)展潮流,各國的半導體和軟件制造商紛紛推出相應(yīng)的嵌入式SoC產(chǎn)品。
著名的SoC硬件平臺包括:Intel公司的StrongArm核心處理器" title="核心處理器">核心處理器,擁有32位RISC數(shù)據(jù)總線、512KB的FLASH、256KB的SRAM和16位THUMB指令集,支持在片調(diào)試、三級流水線技術(shù)和LCD控制;Motorola公司的Dragonball核心處理器,它是32位RISC處理器,擁有16.85MHz時鐘頻率和2.7MIPS的處理速度,無縫集成SRAM、EPROM、FLASH、LCD控制器和PWM輸出,支持16位端口DRAM;NEC公司的VR核心處理器,它是64位RISC芯片,擁有300MHz時鐘和603MIPS的處理速度,集成統(tǒng)一的L2高速緩沖存儲器、DRAM控制器、PCI-X網(wǎng)橋和10/100MAC設(shè)備。著名的SoC軟件平臺即實時操作系統(tǒng)包括:QNX公司的QNX、Wind River公司的VxWorks和Integrated System公司的PSOSystem。它們都是實時、微核、基于優(yōu)先級、消息傳遞、搶占式多任務(wù)、多用戶分布式網(wǎng)絡(luò)操作系統(tǒng),擁有模塊化結(jié)構(gòu),內(nèi)核運行高速穩(wěn)定,通信能力和擴展裁剪能力很強。
在上述平臺中,StrongArm核心處理器和Dragonball核心處理器以及VxWorks操作系統(tǒng)在汽車SoC系統(tǒng)中有著良好的應(yīng)用前景。
3 SoC系統(tǒng)的典型應(yīng)用
汽車嵌入式SoC系統(tǒng)充分適應(yīng)了汽車的工作環(huán)境和技術(shù)要求,在汽車電子技術(shù)上廣泛應(yīng)用。其中北京理工大學正在研究的汽車ABS/ASR/ACC集成化控制系統(tǒng)具有代表性。
ABS/ASR/ACC集成化系統(tǒng)是綜合了制動防抱死功能(ABS)、驅(qū)動防滑功能(ASR)和自適應(yīng)巡航功能(ACC)的汽車新型主動安全系統(tǒng),系統(tǒng)結(jié)構(gòu)如圖2所示。其在硬件上充分利用各個子系統(tǒng)的現(xiàn)有元件,輪速傳感器、發(fā)動機轉(zhuǎn)速傳感器、節(jié)氣門位置傳感器、加速踏板傳感器和探測雷達組成傳感器網(wǎng)絡(luò),共用控制器和執(zhí)行元件。在軟件上應(yīng)用信息融合、集中控制技術(shù),通過對制動力矩和發(fā)動機輸出功率的綜合調(diào)節(jié)實現(xiàn)汽車制動防抱死、驅(qū)動防滑和自適應(yīng)巡航功能。控制過程充分考慮三個邏輯模塊上的相互關(guān)系,實現(xiàn)信息融合共享,例如ABS與ASR的車輪滑動率計算可以統(tǒng)一,ACC探測雷達獲取的車速信息可以用來修正ABS參考車速[5]。

系統(tǒng)選用32位SoC硬件平臺如Dragon ball核心的MC68EZ328取代原來的16位ABS控制器,提高了硬件處理速度與抗干擾能力,端口資源也更豐富。車載雷達選用法國AutoCruise公司生產(chǎn)的AC10型77GHz毫米波車載雷達,雷達信號的處理采用DSP處理器,并通過CAN總線與ABS/ASR/ACC集成系統(tǒng)控制器進行通信。CAN總線傳輸具有數(shù)據(jù)差動收發(fā)、容錯和非破壞性仲裁的能力,傳輸速率高達1 Mbps。采用CAN通信提高了控制系統(tǒng)的實時性[6],并為系統(tǒng)功能擴展和整車傳感器信息共享提供了方便。CAN通信拓撲結(jié)構(gòu)如圖3所示。

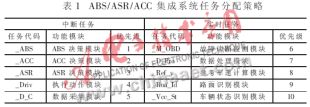
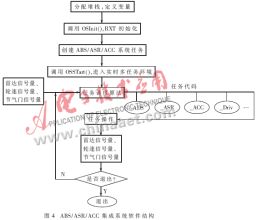
汽車ABS/ASR/ACC系統(tǒng)軟件集成化的難點是:在保證控制實時性的前提下如何進行中斷管理和協(xié)調(diào)各項任務(wù)的優(yōu)先級,因此在該系統(tǒng)中引入嵌入式實時操作系統(tǒng)十分必要。實時操作系統(tǒng)能合理分配軟、硬件資源,實時進行多任務(wù)并行處理,為系統(tǒng)進行HAC(坡起輔助系統(tǒng))與EBD(電子制動力分配系統(tǒng))等功能擴展提供了條件,同時支持多線程的軟件結(jié)構(gòu),增強了軟件抗干擾性。操作系統(tǒng)選用VxWorks,任務(wù)調(diào)度采用基于優(yōu)先級的搶占式策略。ABS/ASR/ACC集成系統(tǒng)中的任務(wù)優(yōu)先級分配策略如表1所示。基于操作系統(tǒng)和任務(wù)優(yōu)先級設(shè)定,具體的ABS、ASR和ACC控制功能由API調(diào)用應(yīng)用程序?qū)崿F(xiàn)。集成系統(tǒng)軟件結(jié)構(gòu)如圖4所示。
汽車ABS/ASR/ACC集成化系統(tǒng)采用新一代嵌入式技術(shù),提高了系統(tǒng)的實時性、可靠性、可維護性和可擴展性。
4 SoC系統(tǒng)的發(fā)展趨勢
汽車嵌入式SoC系統(tǒng)具有卓越的性能,其優(yōu)越性逐漸被汽車界所認可。今后汽車嵌入式SoC系統(tǒng)將呈現(xiàn)出以下幾個發(fā)展趨勢:
(1)汽車嵌入式SoC系統(tǒng)將會向FPGA/CPLD(在線可編程門陣列)方向發(fā)展,系統(tǒng)由分布式可編程互連邏輯單元構(gòu)成,單元之間可以交換信息,大量運算由硬件直接完成,體系結(jié)構(gòu)更加靈活,集成度更高;
(2)在系統(tǒng)開發(fā)上遵循通用的汽車電子系統(tǒng)開放平臺和統(tǒng)一的標準。為了提高軟硬件通用性,加快開發(fā)速度,降低成本,SoC系統(tǒng)迫切需要構(gòu)建統(tǒng)一的標準與開發(fā)平臺,歐洲頒布的基于OSEK/VDX標準的MODISTARC規(guī)范將是汽車嵌入式系統(tǒng)開發(fā)平臺的發(fā)展趨勢;
(3)隨著汽車局域網(wǎng)技術(shù)和智能交通技術(shù)的發(fā)展,嵌入式SoC系統(tǒng)將會形成以C級或D級網(wǎng)絡(luò)為基礎(chǔ)的整車分布式控制系統(tǒng)和以無線通信為基礎(chǔ)的遠程高頻網(wǎng)絡(luò)通信系統(tǒng);
(4)嵌入式SoC系統(tǒng)的應(yīng)用范圍將逐步從高檔車和進口車擴展到低檔車和國產(chǎn)車。
汽車嵌入式系統(tǒng)近年來發(fā)展非常迅速,隨著后PC時代的來臨,基于網(wǎng)絡(luò)通信和實時多任務(wù)并行處理的嵌入式高端應(yīng)用將會越來越廣泛。汽車嵌入式SoC系統(tǒng)在硬件上采用32位或64位高性能處理器,在軟件上嵌入了實時操作系統(tǒng),具有功能多樣、集成度高、通信網(wǎng)絡(luò)化、開發(fā)快捷及成本低廉的特點,在汽車電子控制和車載網(wǎng)絡(luò)通信系統(tǒng)方面有著廣泛的應(yīng)用,是未來汽車電子的最佳解決方案。
參考文獻
1 許海燕,付炎.嵌入式系統(tǒng)技術(shù)與應(yīng)用[M].北京:機械工業(yè)出版社,2002
2 嵌入式系統(tǒng)的定義和發(fā)展歷史. http://www.chinaecnet.com/xsj04/xsj040641.asp
3 Giles Hall. Tools for verification reuse in the design of an embedded system [J]. Electronic engineering, 2002; (74)
4 J.R.Evens. Enhanced image detection on an ARM based embedded system [J]. Design automation for embedded systems, 2002;(6)
5 張景波,劉昭度.信息融合技術(shù)在汽車安全行駛中的應(yīng)用[J].系統(tǒng)仿真學報,2003;(9)
6 Michael J. CAN bus based the instrumentation system [J]. Diesel progress, 2003;(69)