
本文實現(xiàn)了一個測量運動員(聽覺)神經(jīng)-運動反應時的系統(tǒng),以提高運動員聽到發(fā)令槍后的起跑速度。該系統(tǒng)是通過聲音傳感器和加速度傳感器檢測運動員聽到發(fā)令槍到起跑所需要的時間,即運動員的神經(jīng)-運動反應時,再通過無線數(shù)據(jù)傳輸模塊將數(shù)據(jù)傳送到PC機進行顯示,并可根據(jù)反應時記錄進行處理和繪制成反應時曲線,能夠直觀地了解運動員反應時的變化及趨勢。
系統(tǒng)結(jié)構(gòu)及其原理
系統(tǒng)結(jié)構(gòu)
本系統(tǒng)主要實現(xiàn)(聽覺)神經(jīng)-運動反應時的測定。方法是通過聲音傳感器檢測發(fā)令槍的聲音,用加速度傳感器檢測運動員起跑的時刻,記錄運動員聽到發(fā)令槍到起跑所需要的時間,再通過無線數(shù)據(jù)傳輸模塊將數(shù)據(jù)傳送到基站進行記錄和處理。系統(tǒng)由反應時測定模塊、通信模塊、數(shù)據(jù)記錄處理模塊三部分組成,結(jié)構(gòu)如圖1所示。
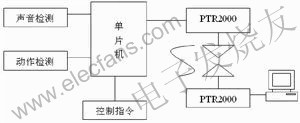
圖1系統(tǒng)結(jié)構(gòu)框圖
反應時測定模塊用單片機作為核心部件,加上聲音傳感器和加速度傳感器檢測電路,通過單片機的內(nèi)部計數(shù)器記錄運動員的起跑反應時,并將記錄的數(shù)據(jù)按照一定的格式編碼,通過串口送至無線發(fā)送模塊,實現(xiàn)與PC機的無線通信。
通信模塊主要用PTR2000無線數(shù)傳模塊實現(xiàn)無線數(shù)據(jù)的傳輸。
數(shù)據(jù)記錄處理模塊通過串行通信的方式接收無線數(shù)傳模塊傳輸?shù)臄?shù)據(jù),并送到由PC機構(gòu)成的基站進行記錄、處理和顯示。
系統(tǒng)設計基本原理
測量準備和系統(tǒng)自檢
系統(tǒng)在反應時測量模塊上設置了一個按鈕,在每次測量前,按此按鈕啟動系統(tǒng)自檢,通過單片機檢查與之相連的各個部件,如存儲器、加速度傳感器、聲音傳感器等的狀態(tài),以及無線通信系統(tǒng)能否正常工作。通過無線傳送模塊,將檢測到的各個部件的狀態(tài)發(fā)送到接收端,若接收端接收到正常的信號,則記錄端可以通知開始測量;若接收不到,則必須檢查、調(diào)試,或者更換測量系統(tǒng),直到接收端接收到正常的信號方可開始測量。
數(shù)據(jù)采集
在系統(tǒng)自檢完成之后,如果各個部件工作正常,就可以開始測量反應時。聲音傳感器檢測到發(fā)令槍的聲音信號后,計數(shù)器開始計數(shù),并查詢加速度傳感器的信號,在檢測到加速度傳感器信號后停止計數(shù),并將計數(shù)值保存在發(fā)送緩沖區(qū),數(shù)據(jù)采集過程結(jié)束。
數(shù)據(jù)的無線發(fā)送和接收
在單片機數(shù)據(jù)采集完成之后,即開始數(shù)據(jù)的無線發(fā)送。在發(fā)送之前,對采集的數(shù)據(jù)按照無線數(shù)傳模塊的要求進行編碼,然后將數(shù)據(jù)通過無線數(shù)傳模塊按照從高位到低位的順序進行發(fā)送。在無線接收端,把接收到的數(shù)據(jù)通過電平轉(zhuǎn)換和RS-232串行接口送至PC機進行處理和顯示。
數(shù)據(jù)的處理和顯示
由PC機構(gòu)成的基站從RS-232串行接口接收到數(shù)據(jù)后,通過運動員起跑反應時處理軟件對數(shù)據(jù)進行處理、存儲、顯示和分析。
系統(tǒng)硬件設計
從硬件角度看,系統(tǒng)可以分成單片機模塊、聲音檢測模塊、運動檢測模塊和無線數(shù)傳模塊等幾部分。
單片機模塊
在本系統(tǒng)中,考慮到反應時測量裝置是安裝在運動員小腿上,對輸入輸出口的數(shù)量需求不多,因此在選擇單片機時,應選擇體積小、功耗小的作為系統(tǒng)前端數(shù)據(jù)測量的核心部件,本系統(tǒng)采用的是Atmel公司生產(chǎn)的8位單片機AT89C2051。
聲音檢測模塊
聲音檢測是本系統(tǒng)設計中的一個關(guān)鍵部分,要求具有較好的靈敏度和抗干擾能力。
駐極體傳聲器是一種微型聲電轉(zhuǎn)換器,這種傳聲器具有靈敏度高、頻率響應范圍寬和體積小等優(yōu)點。在本系統(tǒng)中選用駐極體話筒作為聲音檢測部分的聲音傳感器,用其將聲音信號變換成電信號。
聲音檢測模塊設計的難點和重點是濾除噪音信號。在此模塊的設計過程中,經(jīng)過多次實驗,最終確定了本模塊的電路和相關(guān)參數(shù)。本系統(tǒng)采取幅度比較法實現(xiàn)聲音檢測的功能。因為發(fā)令槍的聲音信號一般幅度較大,可以直接進行放大,通過比較器與閾值電壓相比,當聲音信號大于一定幅度時產(chǎn)生翻轉(zhuǎn)信號。主要考慮的問題是如何對駐極體話筒檢測到的微弱信號進行放大處理。在本系統(tǒng)中采用三極管9013構(gòu)成單級放大電路對信號進行放大。經(jīng)過多次實驗發(fā)現(xiàn),輸出電壓大于4V時,聲音信號振動幅度較大。再加上比較電路就構(gòu)成了本系統(tǒng)的聲音檢測電路,如圖2所示。在此電路中,用R5和R6分壓電路產(chǎn)生一個閾值電壓,在實際設計中設置為4V。電壓比較器LM339的OUT2產(chǎn)生聲音信號自檢電壓,若聲音檢測無故障,應輸出高電平;OUT1作為聲音檢測信號輸出腳與單片機P1.2口相連,當發(fā)令槍響起時輸出一個脈沖信號。
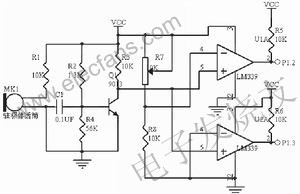
圖2 聲音檢測電路
運動檢測模塊
運動檢測模塊選用了美國ADI公司生產(chǎn)的單片加速度傳感器ADXL105作為運動檢測傳感器,內(nèi)含加速度傳感器和信號調(diào)理器。這是一種差容式力平衡加速度傳感器,利用變間隙的方法,把被測的加速度轉(zhuǎn)換為電容器的電容量變化。內(nèi)部的電容分壓電路,提供與加速度大小成正比的模擬輸出電壓,其相位則取決于加速度的方向,無需外加任何有源器件即可接到ADC的輸入端。既可以用來測量靜態(tài)加速度(如重力加速度或傾角等),又可用來測量動態(tài)加速度(如振動等)。
由于ADXL105可直接輸出模擬信號,因此只需要通過比較器將ADXL105的輸出電壓與閾值電壓相比較,當加速度大于某一閾值時輸出高電平。其原理電路如圖3所示。LM339的OUT3腳輸出運動檢測信號,接單片機的P1.4口;OUT4腳輸出運動自檢信號,接單片機的P1.5口。
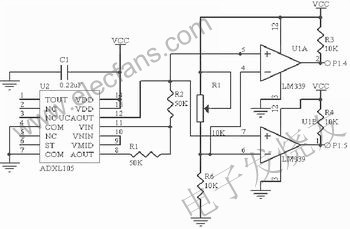
圖3 運動檢測模塊電路原理圖
無線數(shù)傳模塊
本系統(tǒng)中采用基于RF芯片nRF401的無線數(shù)傳PTR2000模塊。nRF401是NORDIC公司最新推出的單片無線收發(fā)一體的芯片,包括高頻發(fā)射、高頻接收、PLL合成、FSK調(diào)制、FSK解調(diào)及多頻道切換等部件,是目前集成度最高的一種無線數(shù)傳芯片。PTR2000既可與80C51、89C2051、68HC08、PIC等各種單片機的串口或I/O口直接連接,也可通過電平轉(zhuǎn)換芯片MAX232與PC機進行串口通信。
系統(tǒng)軟件設計
根據(jù)本系統(tǒng)的設計要求,將系統(tǒng)軟件劃分為發(fā)射端軟件和接收端軟件兩部分分別進行設計。
發(fā)射端軟件
單片機部分的軟件主要可以分為以下幾個模塊:自檢模塊、發(fā)射模塊和計時模塊。單片機主程序流程圖如圖4所示。
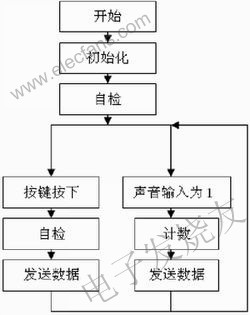
圖4 單片機端主程序流程圖
接收端軟件
在本系統(tǒng)中接收端為PC機,采用VB語言進行編程。在標準RS-232串口通信方面,VB提供了具有強大功能的通信控件Mscomm。該控件可設置串行通信的數(shù)據(jù)發(fā)送和接收,對串口狀態(tài)及串口通信的信息格式和協(xié)議進行設置。這是一個標準的10位串口通信,包括8位數(shù)據(jù)、1位起始位和1位停止位。在發(fā)送或接收數(shù)據(jù)過程中觸發(fā)OnComm事件,通過編程訪問CommEvent的屬性了解通信事件的類型,進行各自的處理。每個通信控件對應一個串口,可以設計多個通信控件來訪問多個通信口。控件提供了功能完善的串口數(shù)據(jù)的發(fā)送和接收功能,Mscomm控件具有兩種處理方式:事件驅(qū)動方式,由Mscomm控件的OnComm事件捕獲并處理通信錯誤及事件;查詢方式,通過檢查CommEvent屬性的值來判斷事件和錯誤。在本系統(tǒng)中采用的是事件驅(qū)動方式。
通過VB編程工具強大的圖形編程方法,可以實現(xiàn)運動員反應曲線圖的繪制。并可對圖形進行放大、縮小以及移動,方便地顯示出運動員反應時的變化趨勢。基于以上各個程序模塊的設計,本軟件實現(xiàn)了對數(shù)據(jù)的實時采集與發(fā)射/接收以及穩(wěn)定顯示,使得整個系統(tǒng)具有很高的實用價值。
結(jié)語
本測量系統(tǒng)采用的方法在國內(nèi)處于領(lǐng)先水平,與之前的起跑反應時模擬測定儀相比,不但可以在運動場上直接、精確地測定運動員的起跑反應時,而且可以對反應時進行分析和綜合,促進對運動員反應時的研究以及提高運動員的訓練水平,為運動員的選材和訓練提供科學的參考依據(jù)。