
O 引言
在電纜生產(chǎn)線上,通常需要檢測電纜的走線速度,用來控制收線電機(jī)的轉(zhuǎn)速和計算線纜的長度。成纜工藝參數(shù)的穩(wěn)定,直接關(guān)系到
該項目中,采用的旋轉(zhuǎn)編碼器的型號是TRDJ1000系列,旋轉(zhuǎn)一周輸出1 000個脈沖。因此,根據(jù)在一定時間內(nèi)檢測到的脈沖數(shù),就可以計算出電纜的走線速度。實際應(yīng)用中,將其與一加工精度極高、周長為500 mm的旋轉(zhuǎn)編碼器測量主動輪與旋轉(zhuǎn)編碼器同軸安裝,主動輪與電纜接觸。在電纜生產(chǎn)運動過程中,依靠摩擦力拉動測量輪旋轉(zhuǎn),這樣就把電纜的直線位移(長度)轉(zhuǎn)化為旋轉(zhuǎn)編碼器的脈沖數(shù)字信號輸出。
設(shè)旋轉(zhuǎn)編碼器每旋轉(zhuǎn)一周,其計數(shù)脈沖個數(shù)為NP(脈沖個數(shù)/轉(zhuǎn)),則旋轉(zhuǎn)編碼器角分辨率(單位:(°)/個)為:
P=360/NP
假定固定在旋轉(zhuǎn)編碼器轉(zhuǎn)軸上的主動導(dǎo)向輪半徑為r m,則旋轉(zhuǎn)編碼器位移分辨率(單位:m/個)為:
Ps=27πr/NP
這時,若計數(shù)脈沖個數(shù)為N(個),則由旋轉(zhuǎn)編碼器測量的位移量S(單位:m)為:
S=Ps·N
線纜走線速度V(單位:m/s)為:
V=S/T
式中:T為接收N個脈沖所用的時間(單位:s)。
2 硬件電路設(shè)計原理
該檢測電路以AT89C51單片機(jī)為控制核心,如圖2所示,旋轉(zhuǎn)編碼器輸出的脈沖,經(jīng)過電平轉(zhuǎn)換,變成O~5 V的TTL電平脈沖,送到AT89 C51單片機(jī)的外部中斷INT0端。每收到一個脈沖,單片機(jī)中斷一次,同時計數(shù)脈沖存儲器加1,與標(biāo)準(zhǔn)脈沖值比較后,單片機(jī)的P0口輸出給定值數(shù)字量,再經(jīng)過D/A轉(zhuǎn)換變成給定值模擬量,送給收線電機(jī)調(diào)速器,控制電機(jī)轉(zhuǎn)速。這里的D/A轉(zhuǎn)換芯片采用8位數(shù)據(jù)輸入,四路模擬量輸出的TLC7226IDW。如果需要提高電機(jī)轉(zhuǎn)速控制精度,可以選用其他10位、12位數(shù)據(jù)輸入的D/A轉(zhuǎn)換芯片。
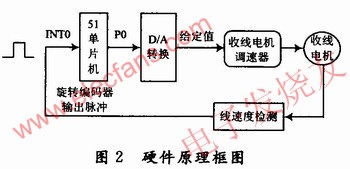
工作時,當(dāng)收線電機(jī)帶動電纜運動時,帶動旋轉(zhuǎn)編碼器的主動輪旋轉(zhuǎn),從而旋轉(zhuǎn)編碼器旋轉(zhuǎn),輸出脈沖。該脈沖送入光電耦合器,進(jìn)行隔離、整形、電平轉(zhuǎn)換,送給AT89C51的12腳,外部中斷INTO進(jìn)行脈沖計數(shù)。每接收到一個脈沖,單片機(jī)執(zhí)行外部中斷INT0子程序一次,脈沖計數(shù)存儲器加1。例如,每間隔1 s讀取一次,從而可以根據(jù)計數(shù)脈沖的個數(shù),與標(biāo)準(zhǔn)脈沖數(shù)比較,因此,可以判斷當(dāng)前線速度的大小。
線速度的計算方法如下:
例如,要求線速度V為0.1 m/s。
旋轉(zhuǎn)編碼器每秒輸出脈沖數(shù)=V·Np/C
其中:C為旋轉(zhuǎn)編碼器主動輪周長(單位:m)。所以,線速度為O.1 m/s時,旋轉(zhuǎn)編碼器每秒輸出標(biāo)準(zhǔn)脈沖數(shù)=0.1×1000/0.5=200個/s。
3 軟件設(shè)計
在定時器中斷中運行,在計時子程序中,每秒執(zhí)行一次。即查詢每秒收到的脈沖數(shù)是否與標(biāo)準(zhǔn)脈沖相同。該線速度控制子程序如圖3所示。
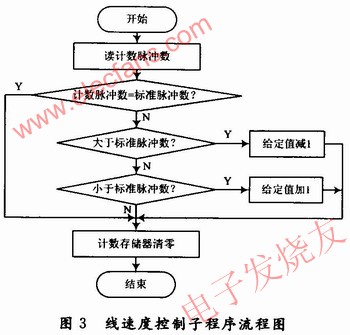
首先,讀脈沖計數(shù)存儲器的數(shù)值,與標(biāo)準(zhǔn)脈沖數(shù)比較,等于標(biāo)準(zhǔn)脈沖,脈沖計數(shù)存儲器數(shù)值清零,說明此時走線速度等于標(biāo)準(zhǔn)速度;若大于標(biāo)準(zhǔn)脈沖數(shù),說明線速度大于標(biāo)準(zhǔn)線速度,因此,必須使調(diào)速器給定值減1,使得收線電機(jī)轉(zhuǎn)速減低;若小于標(biāo)準(zhǔn)脈沖數(shù),說明線速度小于標(biāo)準(zhǔn)線速度,必須使調(diào)速器給定值加1,使得收線電機(jī)轉(zhuǎn)速增加,從而形成閉環(huán)線速度控制反饋系統(tǒng),控制收線電機(jī)旋轉(zhuǎn)速度,使得線速度保持恒定。
4 結(jié)語
根據(jù)電纜成纜機(jī)的工藝要求,設(shè)計了單片機(jī)與旋轉(zhuǎn)編碼器組成的閉環(huán)線速度控制系統(tǒng),并給出了主要控制程序的設(shè)計方法。還可以通過軟件實現(xiàn)線纜走線長度的檢測以及運行時間的計算等功能,并通過顯示屏顯示出來。上述線速度控制系統(tǒng)已成功應(yīng)用在實際的技術(shù)改造中,為企業(yè)節(jié)約了近百萬元的技術(shù)改造資金。結(jié)果表明,該系統(tǒng)具有運行穩(wěn)定可靠、電路簡單、測量精度較高、成本低等特點,完全滿足電纜生產(chǎn)工藝要求,其簡潔的電路設(shè)計和典型的控制方法具有較高的參考價值。