
在您進行徹底的系統(tǒng)評估以前,您如何決定在您的應(yīng)用中使用哪一種 ADC 技術(shù)呢?您也許會首選 SAR 轉(zhuǎn)換器 (SAR-ADC),因為您認(rèn)為它們易于使用,并且速度比 Δ-Σ 轉(zhuǎn)換器要快一點。其次,您可能會選擇使用一個 ΔΣ 轉(zhuǎn)換器,因為您覺得盡管它們的速度要慢一些,但卻具有較好的精度。或者根本無需多想,您可能會選擇您經(jīng)常使用的 ADC。
在選擇一種轉(zhuǎn)換器時,您通常會根據(jù)有效位數(shù) (ENOB)、精確度、重復(fù)定位精度(噪聲)以及輸出數(shù)據(jù)速率來做出轉(zhuǎn)換器選擇的一些決定。您的假設(shè)可能會是:SAR-ADC 利用中等輸出速度產(chǎn)生精確的輸出,而 DS 轉(zhuǎn)換器則利用更低的輸出數(shù)據(jù)速率產(chǎn)生更低噪聲的輸出信號。
這些假設(shè)或許不再能夠指導(dǎo)您在 SAR-ADC 和 DS-ADC 之間做出選擇。想一想如何改變您的設(shè)計范式——將注意力從單個器件轉(zhuǎn)到整個系統(tǒng)上來。您會發(fā)現(xiàn),兩種 ADC 構(gòu)架可能都適合于某個特定的應(yīng)用。例如,如果您知道系統(tǒng) ENOB,則一個結(jié)合了 SAR-ADC 的模擬增益級便可以與一個高速 DS 轉(zhuǎn)換器的性能匹配。
系統(tǒng)評估包括檢查系統(tǒng)采樣速度(一次詳細(xì)的系統(tǒng)精確度分析),以及比較您系統(tǒng)的重復(fù)定位精確度(噪聲水平)性能。影響系統(tǒng)采樣速度的一些問題是單時鐘頻率的選擇,以及在轉(zhuǎn)換以前為模擬組件完全穩(wěn)定下來留出時間。就系統(tǒng)精確度而言,您可以將 DC 性能特性與總體不可調(diào)節(jié)誤差 (TUE) 品質(zhì)因數(shù)相結(jié)合來進行比較。重復(fù)定位精度不同于精確度評估,它定義了一次轉(zhuǎn)換所得值與其下一次重復(fù)的一致性程度。利用重復(fù)定位精度,您可以根據(jù)有效分辨率 (ER) 結(jié)合信號鏈器件的噪聲性能。
下次文章中,我們將研究 12 位 SAR 與多路復(fù)用 PGA (PGA-SAR) 以及 24 位多路復(fù)用 DS 轉(zhuǎn)換器之間存在的一些具體差異。所有系統(tǒng)的增益范圍(模擬或者數(shù)字)均為 1 到 128 V/V,且電源電壓均為 5V。
我們研究這兩個系統(tǒng)的精確度和重復(fù)定位精度時,我們可以使用表 1 來作為開始。在表 1 中,系統(tǒng)增益范圍為 1 到 128。表格第二列顯示了理想系統(tǒng)的滿量程范圍 (FSR),其為系統(tǒng)的等效輸入 (RTI)。最終,系統(tǒng)最低有效位(LSB,表格第 3 列)等于系統(tǒng)的 FSR,其除以系統(tǒng)碼數(shù) (4096)。
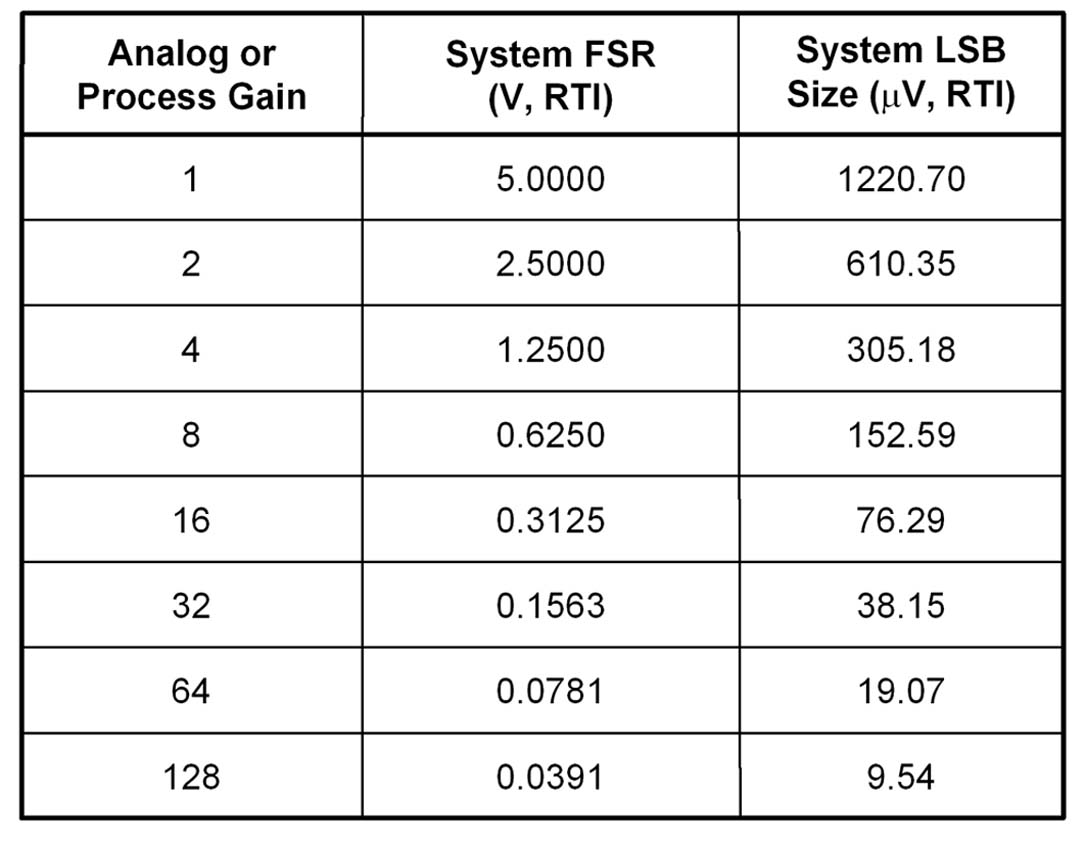
表 1 我們在系統(tǒng)評估中使用 1 到 128 的增益評估精確度 (TUE) 和重復(fù)定位精度(噪聲)時,可使用該表格中包含的理想 FSR 和 LSB 值。
文章所述電路實現(xiàn)的一些應(yīng)用包括手持式儀表、數(shù)據(jù)記錄器、汽車系統(tǒng)和監(jiān)控系統(tǒng)。下次,我們將深入研究這兩種設(shè)計的轉(zhuǎn)換速度。以后,我們將研究這些系統(tǒng)的精確度 (TUE) 和重復(fù)定位精度(噪聲)。