
摘要:針對船舶氣象儀保障維修而設(shè)計(jì)的船舶氣象儀測試系統(tǒng),包括信息處理終端、主儀器檢測模塊、傳感器" title="傳感器">傳感器檢測模塊,各個(gè)模塊都采用基于AVR單片機(jī)" title="AVR單片機(jī)">AVR單片機(jī)的嵌入式系統(tǒng),模塊之間通過CAN總線" title="CAN總線">CAN總線進(jìn)行通信。結(jié)果表明,船舶氣象儀測試系統(tǒng)能夠快速檢測船舶氣象儀故障,與單純依靠人工方式排查故障相比,故障檢測時(shí)間縮短了60%以上。
關(guān)鍵詞:船舶氣象儀保障維修;船舶氣象儀測試系統(tǒng);AVR單片機(jī);CAN總線
船舶氣象儀是船舶導(dǎo)航系統(tǒng)設(shè)備之一,可測量船舶所在位置海區(qū)的風(fēng)速、風(fēng)向、溫度、濕度、氣壓等多項(xiàng)氣象要素,可向船舶的導(dǎo)航系統(tǒng)傳送實(shí)時(shí)的氣象參數(shù)。船舶氣象儀一旦出現(xiàn)故障,將會影響船舶操作人員對各種氣象要素的估計(jì)和判斷,甚至導(dǎo)致航行船舶失控、擱淺、觸礁、傾覆等嚴(yán)重事故。為了保障船舶氣象儀能夠時(shí)刻處于良好的狀態(tài),需要先進(jìn)的測試技術(shù)和便攜式的測試設(shè)備對船舶氣象儀的運(yùn)行情況進(jìn)行檢測。但是,目前市面上還沒有出現(xiàn)一套完整的測試系統(tǒng)來完成對現(xiàn)有船舶氣象儀的檢測任務(wù),以滿足船舶操作人員的使用和保障需求。針對目前船舶上普遍使用的氣象儀器專門設(shè)計(jì)的船舶氣象儀測試系統(tǒng),能夠很好地完成船舶氣象儀的故障測試任務(wù),縮短船舶氣象儀的測試診斷時(shí)間,滿足船舶氣象儀的快速維修要求,其操作簡便,測試效率高,大大降低了氣象儀的維修費(fèi)用。
1 系統(tǒng)總體設(shè)計(jì)
在分析船舶氣象儀軟硬件原理和結(jié)構(gòu)的基礎(chǔ)上,充分考慮船舶的維修環(huán)境,確定了便攜式、模塊化設(shè)計(jì)思想。由于船舶氣象儀主要由主儀器和各種氣象要素傳感器兩大部分組成,因此分別設(shè)計(jì)了主儀器檢測模塊和傳感器檢測模塊。信息處理終端是船舶氣象儀測試系統(tǒng)的控制核心,提供人機(jī)交互界面和操作按鍵,響應(yīng)用戶的操作命令并顯示檢測信息。系統(tǒng)總體框圖如圖1所示。圖中虛線框內(nèi)為檢測對象,虛線箭頭表示船舶氣象儀測試系統(tǒng)進(jìn)行自檢測時(shí)的連接方向。
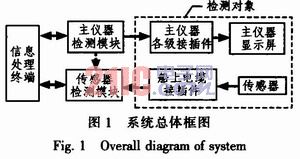
考慮到船舶工作環(huán)境相對惡劣,加上電子裝備甚多,電磁干擾嚴(yán)重,因此船舶氣象儀測試系統(tǒng)各模塊之間采用CAN總線進(jìn)行通信。CAN總線是一種技術(shù)先進(jìn)、可靠性高、功能完善、成本合理的網(wǎng)絡(luò)通信控制方式。
2 系統(tǒng)工作原理
2.1 檢測船舶氣象儀主儀器
利用船舶氣象儀測試系統(tǒng)可以對船舶氣象儀主儀器進(jìn)行逐級測試,從而對主儀器及其內(nèi)部功能模板是否故障作出快速判斷。
檢測時(shí),主儀器檢測模塊仿真輸出3檔(低檔、中檔、高檔)傳感器信號,維修人員按照從內(nèi)到外或者從外到內(nèi)的順序?qū)⑵渲鸺夁B接到船舶氣象儀主儀器相應(yīng)的接插件上,同時(shí)觀察船舶氣象儀顯示屏上風(fēng)速、風(fēng)向、溫度、濕度、氣壓的測量數(shù)據(jù),如果這些測量數(shù)據(jù)跟隨船舶氣象儀測試系統(tǒng)設(shè)定值的變化而變化,可以確定這一級沒有故障,否則可以確定故障就在這一級。
2.2 檢測船舶氣象儀傳感器
利用船舶氣象儀測試系統(tǒng)可以對船舶氣象儀傳感器信號進(jìn)行實(shí)時(shí)監(jiān)測,從而對傳感器及其傳輸線路是否故障作出快速判斷。
檢測時(shí),傳感器檢測模塊檢測傳感器信號,信息處理終端顯示實(shí)時(shí)測量值和檢測結(jié)果,維修人員按照操作規(guī)程使傳感器信號發(fā)生一個(gè)特定的變化,信息處理終端根據(jù)傳感器信號是否發(fā)生了預(yù)期的變化,得出傳感器是否故障的診斷結(jié)果。
2.3 船舶氣象儀測試系統(tǒng)自檢測
船舶氣象儀測試系統(tǒng)自檢測可以排除船舶氣象儀測試系統(tǒng)本身故障的可能。檢測時(shí),把主儀器檢測模塊和傳感器檢測模塊分別連接到船舶氣象儀測試系統(tǒng)信息處理終端的CAN總線接口上,并把主儀器檢測模塊的風(fēng)、溫濕、壓的輸出接口與傳感器檢測模塊對應(yīng)的輸入接口連接起來。信息處理終端接收傳感器檢測模塊的采樣數(shù)據(jù),并與主儀器檢測模塊輸出的數(shù)據(jù)比較,根據(jù)二者是否一致,得出船舶氣象儀測試系統(tǒng)本身是否故障的診斷結(jié)果。
3 系統(tǒng)硬件電路設(shè)計(jì)
3.1 信息處理終端硬件組成
信息處理終端硬件設(shè)計(jì)結(jié)構(gòu)框圖如圖2所示,由微處理器、顯示屏、按鍵、CAN總線接口電路、供電單元組成。信息處理終端微處理器選用Atmel公司AVR單片機(jī)AT90CANl28" title="AT90CANl28">AT90CANl28,它內(nèi)部資源豐富,集成了A/D轉(zhuǎn)換器,CAN控制器,因而只需少量外圍測量電路便可組成集控制、通信功能于一體的單片系統(tǒng),既減小了系統(tǒng)的規(guī)模,又提高了系統(tǒng)的可靠性。供電采用外接交流220 V電源和可充電鋰電池2種方式。

主儀器檢測模塊和傳感器檢測模塊的微處理器也選用AT90CANl28,供電方式與信息處理終端相同。
3.2 主儀器檢測模塊硬件組成
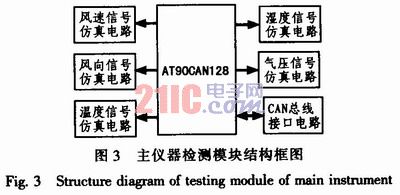
主儀器檢測模塊的主要功能是提供多種接口插座適配各類接插件,仿真輸出各類傳感器信號,包括風(fēng)速、風(fēng)向、溫度、濕度、氣壓信號。為了與船舶氣象儀測試系統(tǒng)其他模塊通信,設(shè)計(jì)了CAN總線接口電路。主儀器檢測模塊硬件設(shè)計(jì)結(jié)構(gòu)框圖如圖3所示。
3.3 傳感器檢測模塊硬件組成
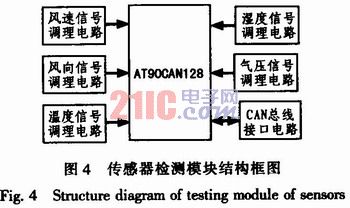
傳感器檢測模塊的主要功能是提供多種接口插座適配各類接插件,對各類傳感器信號進(jìn)行調(diào)理,包含的氣象要素信號與主儀器檢測模塊相同,只是處理電路不同。傳感器檢測模塊硬件設(shè)計(jì)結(jié)構(gòu)框圖如圖4所示。
4 系統(tǒng)軟件設(shè)計(jì)
4.1 設(shè)計(jì)方法
系統(tǒng)軟件設(shè)計(jì)采用AVR Studio+Winavr的集成開發(fā)平臺。AVR Studio是在Windows 9x/Me/NT/2000/XP操作系統(tǒng)下編寫和調(diào)試AVR應(yīng)用程序的嵌入式開發(fā)環(huán)境(IDE),Winavr是一組開放源代碼的程序集,用于AVR系列單片機(jī)的開發(fā),AVR Studio配合Winavr能夠支持AVR C/C++程序的編輯、編譯、連接以及生成目標(biāo)代碼,同時(shí)配合Atmel公司設(shè)計(jì)的實(shí)時(shí)在片仿真器JTAGICE mkⅡ能夠?qū)崿F(xiàn)系統(tǒng)的在線硬件仿真調(diào)試功能和目標(biāo)代碼的下載功能。
4.2 信息處理終端程序
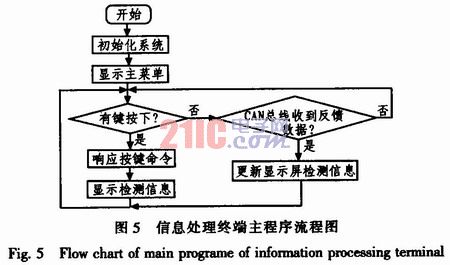
信息處理終端根據(jù)用戶的按鍵操作,向船舶氣象儀測試系統(tǒng)檢測模塊發(fā)送檢測命令,根據(jù)檢測模塊發(fā)回的反饋數(shù)據(jù)及時(shí)更新檢測信息。信息處理終端主程序流程圖如圖5所示。
4.3 主儀器檢測模塊程序
主儀器檢測模塊按照信息處理終端的指令仿真輸出傳感器信號,代替實(shí)際傳感器與船舶氣象儀主儀器接插件連接,對主儀器傳感器接口及其內(nèi)部通道、主儀器內(nèi)部各個(gè)相關(guān)模塊進(jìn)行檢測,并將檢測結(jié)果反饋到CAN總線上。主儀器檢測模塊主程序流程圖參見圖6。

4.4 傳感器檢測模塊程序
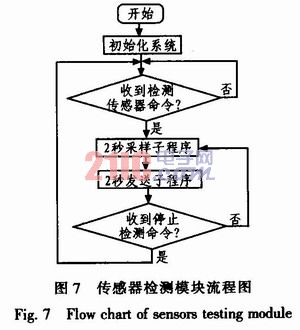
傳感器模塊按照信息處理終端的指令采集傳感器信號,對信號進(jìn)行計(jì)算處理后,將數(shù)據(jù)返回給信息處理終端。傳感器檢測模塊主程序流程圖參見圖7。
5 結(jié)束語
針對目前船舶上普遍使用的氣象儀器進(jìn)行專門設(shè)計(jì)的船舶氣象儀測試系統(tǒng),克服了人工排查故障費(fèi)時(shí)費(fèi)力的缺點(diǎn),降低了維修難度,提高了維修效率,從而能夠滿足普通船舶操作人員的使用和保障需求。