
汽車儀表是汽車與駕駛員進行信息交流的窗口,是汽車信息的中心,能夠集中、直觀、迅速地反映汽車在行駛過程中的各種動態(tài)指標,如行駛速度、里程、電系狀況、制動、壓力、發(fā)動機轉(zhuǎn)速、冷卻液溫度、油量、各種危險報警。隨著科技進步,汽車排放、節(jié)能、安全和舒適性等使用性能不斷提高,汽車電子控制程度也越來越高。汽車電子控制裝置必須迅速、準確地處理各種信息,并通過儀表顯示出來,使駕駛員能夠及時了解并掌握汽車的運行狀態(tài),以妥善處理各種情況。
這里給出一種基于CAN(Controller Area Network)總線的汽車儀表設計方案。該儀表利用CAN總線使其成為車身網(wǎng)絡一部分,遵循SAE J1939協(xié)議讀取發(fā)動機轉(zhuǎn)速、水溫等信息。儀表還能接收傳感器的車速、油量、油壓、制動氣壓等信號并顯示,為駕駛員提供實時車輛工況。所設計的儀表主要應用于重型運輸車等領域,在某重型車輛工廠進行的試驗結果表明,該儀表能夠滿足數(shù)據(jù)可靠性及實時性等要求。
1 CAN總線及SAE J1939協(xié)議
1.1 CAN總線及SAE J1939協(xié)議簡介
CAN總線屬于現(xiàn)場總線的范疇,是德國Bosch公司在20世紀80年代初為解決現(xiàn)代汽車中眾多的控制和測試儀器之間的數(shù)據(jù)交換而開發(fā)的一種有效支持分布式控制或?qū)崟r控制的串行通信網(wǎng)絡。CAN總線的通信實時性強,數(shù)據(jù)傳輸速率可高達1 Mb/s,通信介質(zhì)可以是雙絞線、同軸電纜或者光導纖維,通過標準的插接件能夠方便的連接。CAN總線的數(shù)據(jù)通信具有突出的可靠性、實時性和靈活性,是目前應用最廣泛的一種汽車總線。
SAE J1939協(xié)議是美國汽車工程師協(xié)會SAE(Societv of Automotive Engineer)發(fā)布的以CAN2.0B作為網(wǎng)絡核心協(xié)議的車輛網(wǎng)絡串行通信和控制協(xié)議。J1939是參照ISO的開放式數(shù)據(jù)互聯(lián)模型定義的7層基準參考模型而制定的。該協(xié)議明確規(guī)定汽車內(nèi)部ECU的地址配置、命名、通訊方式以及報文發(fā)送優(yōu)先級等,并且對汽車內(nèi)部各個具體的ECU通訊作了詳細的說明。它使用多路復用技術,為汽車上的各種傳感器、執(zhí)行器和控制器提供建立在CAN總線基礎上的標準化的高速網(wǎng)絡連接,在車載電子裝置之間實現(xiàn)高速數(shù)據(jù)共享,有效地減少了電子線束的數(shù)量,提高了車輛電子控制系統(tǒng)的靈活性、可靠性、可維修性和標準化程度,更大程度地發(fā)揮了CAN優(yōu)異的性能。
1.2 SAE J1939數(shù)據(jù)幀格式
SAE J1939數(shù)據(jù)幀是以PDU(協(xié)議數(shù)據(jù)單元)為單位,共由優(yōu)先權(P)、保留位(R)、數(shù)據(jù)頁(DP)、PDU格式(PF)、PDU細節(jié)(Ps)、源地址(SA)及數(shù)據(jù)域(Date Field)等7個域組成。除了數(shù)據(jù)域之外的PDU對應于CAN擴展幀的29位標識符。其中PS是1個8位段,其定義取決于PF值。若PF值小于240,PS是目標地址(DA)。若PF值介于240和255之間,則PS為組擴展(GE)。
有些CAN數(shù)據(jù)幀不是在PDU中定義,包括SOF、SRR、IDE、RTR、控制域部分、CRC域、ACK域和EOF域。這些域是由CAN定義的,SAE J1939不作修改。
2 CAN總線汽車儀表設計
2.1 儀表整體設計
該汽車儀表系統(tǒng)由數(shù)據(jù)采集、處理以及顯示3個模塊組成。其中數(shù)據(jù)采集模塊負責接收車輛的各種數(shù)據(jù),并將數(shù)據(jù)預處理后發(fā)送至微處理器。其中模擬量信號、脈沖信號以及開關量信號等傳感器信號在各傳感器處采集后,分別經(jīng)過分壓、濾波整形以及光電隔離后發(fā)送至微處理器。而發(fā)動機轉(zhuǎn)速、水溫和故障代碼等CAN總線數(shù)據(jù)通過發(fā)動機CAN模塊發(fā)送至CAN總線后,通過CAN收發(fā)器進行接收。微處理器接收到需要的數(shù)據(jù)后,根據(jù)預定的算法對數(shù)據(jù)進行處理,并將處理結果輸出。顯示模塊包括指針、LCD以及各種信號燈的顯示。微處理器將發(fā)動機轉(zhuǎn)速、車速等結果輸出至電機驅(qū)動器,驅(qū)動器驅(qū)動步進電機轉(zhuǎn)動,從而帶動指針顯示;微處理器直接驅(qū)動LCD顯示及LED燈的亮滅。汽車儀表系統(tǒng)結構如圖1所示。
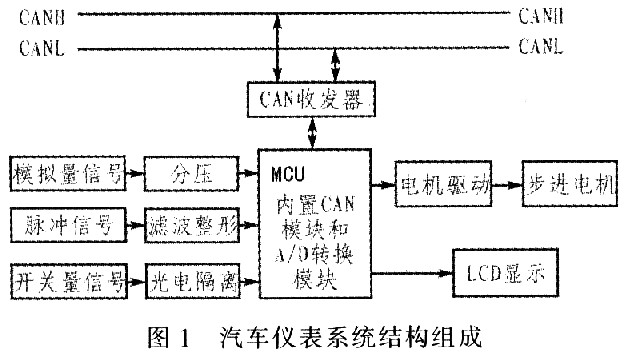
根據(jù)對汽車儀表的整體分析,汽車儀表盤由3個分表盤組成,左分表盤顯示發(fā)動機轉(zhuǎn)速、油量等數(shù)據(jù),右分表盤顯示車速、油壓等數(shù)據(jù),中分表盤用于放置LCD顯示屏以及各種指示燈。儀表指針全部采用步進電機驅(qū)動。儀表接收到的各種數(shù)據(jù)中,從CAN總線獲取發(fā)動機轉(zhuǎn)速、水溫以及電壓,從各種傳感器獲取車速、油量、氣壓以及油壓。
2.2 系統(tǒng)硬件設計
儀表采用Luminarv公司的LM3S2948處理器。這是一款基于ARMCortexM3內(nèi)核的微處理器,采用32位RISC,內(nèi)嵌CAN控制器、模數(shù)轉(zhuǎn)換器(ADC)、模擬比較器等功能模塊,減少了外圍電路,降低了系統(tǒng)設計成本。LM3S2948處理器內(nèi)置CAN模塊方便了CAN總線數(shù)據(jù)的傳輸,同時使儀表的通信容易實現(xiàn),提高了可靠性。其內(nèi)置CAN模塊具有以下特點:支持CAN 2.0B協(xié)議并支持符合SAE J1939協(xié)議的擴展幀的報文傳輸:位速率可高達l Mb/s;具有32個報文對象,每個對象都具有自己的標識符屏蔽碼;包含可屏蔽中斷,針對時間觸發(fā)的CAN(1TrCAN)應用,可選擇禁止自動重發(fā)送模式;通過CANOTx和CANORx引腳與外部CAN PHY無縫連接;具有可編程的F1F0模式。
LM3S2948微處理器具有運算速度快、功耗小、體積小、價位低等特點。其CAN控制器模塊特性完全滿足CAN總線汽車儀表的應用要求。該處理器具有強大的處理能力,在車輛的各種工況下都能夠?qū)崟r反映車輛信息,同時該處理器具有很大的可擴展空間,有利于后續(xù)開發(fā)。
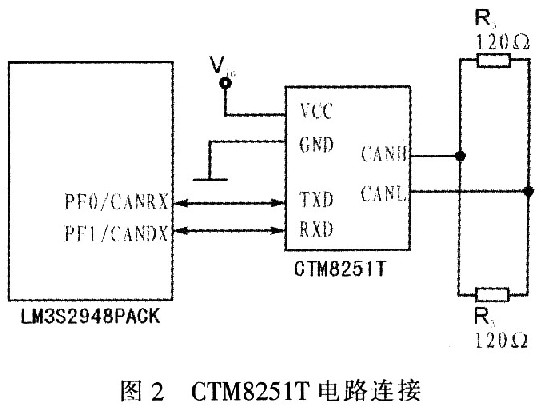
由于LM3S2948內(nèi)置CAN控制器模塊,所以只需外接一個CAN收發(fā)器即可接收總線數(shù)據(jù)。該儀表選用CTM8251T作為CAN收發(fā)器。CTM8251T是一款通用的帶隔離的CAN收發(fā)器,該器件內(nèi)部集成所有必需的CAN隔離及CAN收發(fā)器。該器件可連接任何一款CAN協(xié)議控制器,實現(xiàn)CAN節(jié)點的收發(fā)與隔離功能。該器件設計體積小,集成度高,可取代傳統(tǒng)的CAN收發(fā)器及其外圍電路,降低了電路的復雜程度,減少了設計成本,如圖2所示。
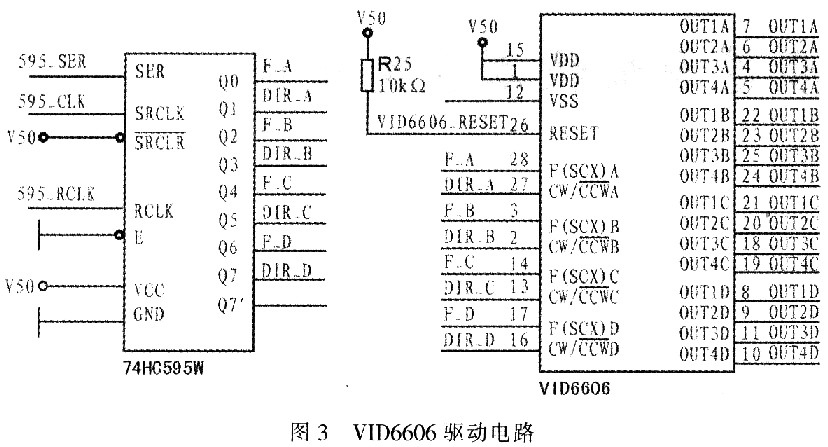
儀表采用VID6606驅(qū)動器驅(qū)動步進電機。每片VID6606可同時驅(qū)動4路步進電機。在其頻率控制端輸入脈沖序列F(SCX),即可控制輸出端使步進電機的輸出軸以微步轉(zhuǎn)動,每個微步電機輸出軸轉(zhuǎn)動1/12(°),最大角速度可達600(°)/s。該電機驅(qū)動器具有以下特點:硬件微步驅(qū)動、簡單易用,電機只需速度F(sex)和方向(CW/CCW)2個控制端、所有輸入引腳都有干擾過濾器、寬工作電壓、低電磁干擾輻射。儀表板指針采用VID-29電機驅(qū)動,電機內(nèi)置減速比180/1的齒輪系,能夠?qū)?shù)字信號直接準確地轉(zhuǎn)為模擬的顯示輸出。該電機具有很高的顯示精度,其步距角最小可達到1/2(°)。圖3所示為VID6606驅(qū)動儀表電路。
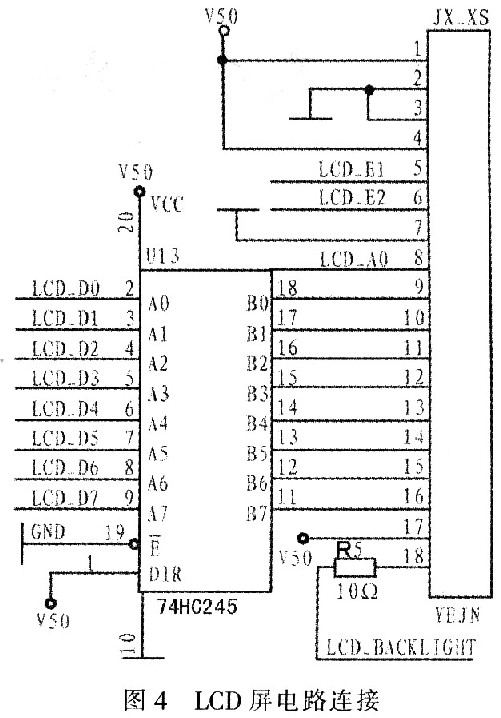
該儀表利用LCD顯示時間、燃油消耗量以及產(chǎn)生故障時故障名稱,處理器發(fā)送的信號先經(jīng)74HC245功率放大后,然后送至液晶屏F2000LCD顯示。LCD電路如圖4所示。
2.3 系統(tǒng)軟件設計
系統(tǒng)軟件設計分為主程序、CAN通信、數(shù)據(jù)采集處理和數(shù)據(jù)顯示等4個模塊。主程序模塊通過調(diào)用各個子模塊程序來處理數(shù)據(jù)處理:CAN通信模塊負責發(fā)送和接收數(shù)據(jù);數(shù)據(jù)采集及處理模塊完成對各種類型數(shù)據(jù)的采集以及計算;數(shù)據(jù)顯示模塊將車速、油壓以及信號燈等信息顯示在儀表上。
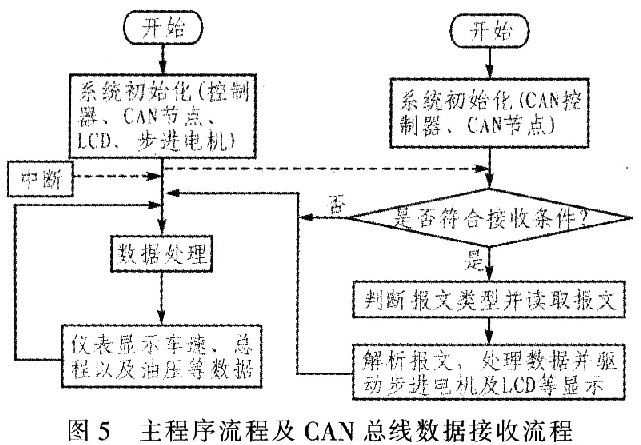
圖5為系統(tǒng)主程序流程,該系統(tǒng)主程序流程分為:
1)系統(tǒng)初始化。系統(tǒng)初始化主要包括初始化系統(tǒng)時鐘、CAN節(jié)點、LCD液晶屏、步進電機等,并使能CAN中斷,設置CAN屏蔽碼和驗收碼。CAN節(jié)點初始化主要是初始化CAN控制器并中斷CAN控制器:
2)讀取傳感器以及CAN總線數(shù)據(jù),并驅(qū)動指針以及LCD等顯示,同時等待CAN接收中斷。
3)CAN接收中斷產(chǎn)生,進入接收中斷子程序讀取數(shù)據(jù)。判斷數(shù)據(jù)是否符合數(shù)據(jù)接收條件,如果符合,則接收數(shù)據(jù)。此過程逐位比較接收到的29位標識符與驗收碼、屏蔽碼,只有標識符相應位與驗收碼相應位相同,系統(tǒng)才開始接收數(shù)據(jù)。
4)處理器將接收的報文進行解析,提取需要的數(shù)據(jù)并進行處理。處理器對傳感器傳來的數(shù)據(jù)和CAN總線讀取的數(shù)據(jù)進行處理計算,得到相應的指針驅(qū)動參數(shù),計算出指針轉(zhuǎn)角,并根據(jù)初始化的步進電機的參數(shù)計算出指針轉(zhuǎn)動速度。指針轉(zhuǎn)動速度與相應的參數(shù)變化速度成正比。同時計算出車輛行駛里程并累加到總路程上。
5)處理器將包含車輛工況的一組脈沖序列發(fā)送至步進電機驅(qū)動器,驅(qū)動器驅(qū)動步進電機以微步方式轉(zhuǎn)動,指示出相應的發(fā)動機轉(zhuǎn)速、車速、水溫以及油壓等;處理器將包含車輛總路程等信息的數(shù)據(jù)發(fā)送至LCD控制器,控制器控制LCD顯示相應的總路程等:處理器改變相應的I/O引腳狀態(tài)直接點亮/關閉相應的指示燈。
2.4 故障顯示
該儀表能夠從CAN總線接收故障代碼并對故障代碼進行解析,與預先寫入的故障碼比對后找到對應的故障信息并顯示在LCD屏幕上。每一類型的數(shù)據(jù)都有特定的數(shù)據(jù)幀ID,系統(tǒng)根據(jù)幀ID判斷故障產(chǎn)生的位置。如果收到的是單幀故障,則系統(tǒng)來提取總字節(jié)數(shù)和總包數(shù);如果收到的是多幀故障,系統(tǒng)則連續(xù)提取故障診斷報文至特定的字節(jié),然后根據(jù)故障代碼查找故障類型。
3 結束語
在研究CAN總線和SAE J1939協(xié)議的基礎上,設計CAN總線汽車儀表。該設計充分利用LM3S2948以及VID6606的功能,較大程度上降低了系統(tǒng)外圍電路的設計以及成本。多次實車試驗結果表明,相對于常規(guī)儀表,該CAN總線儀表具有以下優(yōu)點:抗干擾能力強,傳輸速率高,能夠保證數(shù)據(jù)有效、快速、穩(wěn)定地傳輸;減少車身布線,硬件方案軟件化實現(xiàn),簡化了設計,降低了成本;及時、直觀地查看車輛故障;CAN總線將整車構成一個網(wǎng)絡系統(tǒng),能夠提升系統(tǒng)的靈活性,方便地增加設備,擴大了可開發(fā)的空間。