
在通常以微控制器如DSP為控制核心進(jìn)行電機(jī)控制系統(tǒng)的實(shí)驗(yàn)開發(fā)過程中,由于要編寫大量的程序代碼而需要大量的編程時(shí)間,而且如果控制系統(tǒng)算法需要更改或增加則又需較多時(shí)間來更改軟件,因此實(shí)驗(yàn)開發(fā)周期長,不利于控制算法的研究和實(shí)際應(yīng)用。
dSPACE是由德國dSPACE公司開發(fā)的一套基于Matlab/Simulink的控制系統(tǒng)開發(fā)及測試的設(shè)備,它實(shí)現(xiàn)了和Matlab/Simulink的完全無縫連接,可以很好地完成控制算法的設(shè)計(jì)、測試與實(shí)現(xiàn),有效克服了傳統(tǒng)控制系統(tǒng)開發(fā)存在的上述問題。它具有運(yùn)算速度快、使用方便和界面友好等優(yōu)點(diǎn)。dSPACE實(shí)時(shí)系統(tǒng)功能強(qiáng)大,它既可以和實(shí)際控制對象相連(稱為快速控制原型),這時(shí)它起到主控制器的作用;又可以和實(shí)際控制器相連(稱為硬件在回路仿真),這時(shí)它起到被控對象的作用。從而利用基于dSPACE的控制系統(tǒng)可以達(dá)到縮短開發(fā)周期以及降低開發(fā)費(fèi)用。
1 基于dSPACE的電機(jī)控制系統(tǒng)實(shí)驗(yàn)平臺(tái)結(jié)構(gòu)
dSPACE在硬件結(jié)構(gòu)形式上分為兩大類:一類是把處理器和I/O集成到一塊電路板上,形成一個(gè)完整的實(shí)時(shí)控制的單板系統(tǒng)(如DSll03控制器板);另一類是將處理器和用戶接口完全分開(如DSl005PPC控制器板),以實(shí)現(xiàn)處理器和I/O能力的升級(jí)擴(kuò)展,處理器和I/O之間通訊由PHS(Peripheral High-speed Bus)總線實(shí)現(xiàn)。
本文以DSl005PPC控制器板為核心,配以DS2001AD采集板、DS2002/2003多路A/D采集板、CP4002多I/O板、DS2102DA輸出板、DS3002增量式編碼器接口板,構(gòu)成了dSPACE的標(biāo)準(zhǔn)組件系統(tǒng)DSl005的硬件部分。基于dSPACE的電機(jī)控制系統(tǒng)實(shí)驗(yàn)平臺(tái)結(jié)構(gòu)框圖如圖1所示。
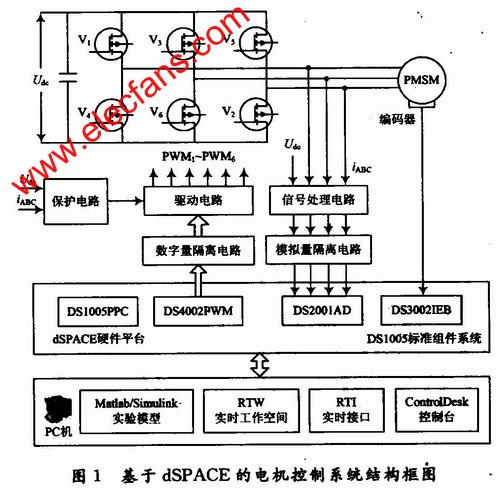
從圖1可以看出,基于dSPACE的電機(jī)控制系統(tǒng)實(shí)驗(yàn)平臺(tái)以dSPACE為控制核心,在外圍還需要擴(kuò)展一些相關(guān)電路,如隔離電路、信號(hào)處理電路、驅(qū)動(dòng)和功率橋電路、保護(hù)電路等,從而構(gòu)成了一個(gè)完整的電機(jī)控制系統(tǒng)實(shí)驗(yàn)平臺(tái)。
1.1 dSPACE本身硬件部分
dSPACE本身已經(jīng)集成好的硬件部分包括DSl005PPC控制板、DS4002多I/O板、DS2001AD采集板和DS3002旋轉(zhuǎn)編碼器接口板等。通過CP4002多I/O板,可以輸出6路PWM電機(jī)控制信號(hào)以控制功率器件的開通和關(guān)斷;通過DS2001AD采集板可以采集電機(jī)的電壓和電流等模擬量,尤其是當(dāng)需要同時(shí)采集更多路數(shù)的模擬量時(shí),可以使用具有32路A/D采集的板卡DS2002/2003;另外通過DS3002旋轉(zhuǎn)編碼器接口板,可以直接將電機(jī)后部帶的編碼器信號(hào)輸入至DSl005PPC,從而用于速度檢測;此外還有DS2102DA輸出板,可以利用它來輸出一些信號(hào)以方便調(diào)試。
1.2 外圍擴(kuò)展電路部分
外圍擴(kuò)展電路部分主要包括PWM信號(hào)反相和死區(qū)產(chǎn)生電路、模擬和數(shù)字隔離電路、電壓和電流采集及信號(hào)處理電路、驅(qū)動(dòng)和功率橋電路和保護(hù)電路等。
由于篇幅所限,此處只給出PWM信號(hào)反相和死區(qū)產(chǎn)生電路,如圖2所示。

針對控制過程中逆變器同一橋臂的上、下功率器件控制波形反相的特點(diǎn),控制軟件只需輸出三路PWM控制信號(hào)而由硬件進(jìn)行反相處理,此外,由于控制電機(jī)時(shí)的PWM脈寬調(diào)制均采用180°PWM導(dǎo)通方式,為避免逆變橋上、下橋臂功率器件同時(shí)導(dǎo)通而燒毀功率器件,所以還需在上、下橋臂的PWM控制信號(hào)之間加以幾個(gè)微秒的信號(hào)延遲,稱為死區(qū)時(shí)間。本文采用由硬件電路來進(jìn)行PWM控制信號(hào)的反相和產(chǎn)生死區(qū)時(shí)間,這樣做的好處在于可以減少軟件的運(yùn)算時(shí)間和節(jié)省存儲(chǔ)空間,且可靠性更高。這樣,三路PWM控制信號(hào)輸入PWM信號(hào)反相和死區(qū)產(chǎn)生電路后,輸出為具有幾個(gè)微妙的死區(qū)時(shí)間的六路PWM電機(jī)控制信號(hào),從而很方便地用于電機(jī)控制。圖2顯示了三路中的一路PWM信號(hào)反相和死區(qū)產(chǎn)生電路。該電路主要使用了反相器74HC04來對PWM信號(hào)實(shí)施反相,同時(shí)還利用了電容沖、放電過程及整形電路來產(chǎn)生死區(qū)時(shí)間,其中,死區(qū)時(shí)間的大小可以通過選擇電容或電阻參數(shù)來設(shè)置。
2 Matlab/Simulink實(shí)驗(yàn)?zāi)P图癛TI接口模塊
在控制系統(tǒng)硬件平臺(tái)結(jié)構(gòu)搭建完成的基礎(chǔ)上,基于dSPACE的控制系統(tǒng)的軟件設(shè)計(jì)相比于采用DSP的常規(guī)的方法來說非常簡單,可以節(jié)省大量的編程時(shí)間。由于控制系統(tǒng)的算法事先都在Matlab/Simulink中離線仿真得到實(shí)現(xiàn),因此軟件設(shè)計(jì)只需要將Matlab/Simulink中仿真時(shí)的所有輸入/輸出接口模塊用dSPACE的RTI模塊(如圖3所示)代替并進(jìn)行單位變換等簡單運(yùn)算,因?yàn)榇藭r(shí)所有輸入或輸出信號(hào)均是針對實(shí)際物理量,因此軟件中參與運(yùn)算的這些輸入或輸出信號(hào)的單位應(yīng)與實(shí)際物理量的單位一致。
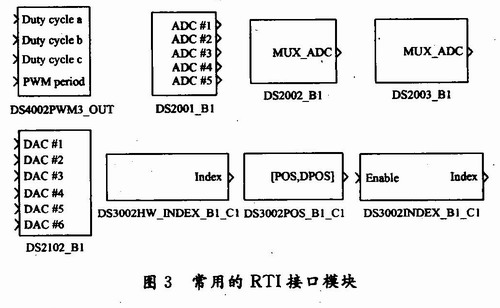
比如:在采集電機(jī)電流iA時(shí),硬件上已經(jīng)利用傳感器和信號(hào)處理等電路將電流信號(hào)采集并轉(zhuǎn)換成±10 V的電壓信號(hào)輸入到了DS2001AD采集板的ADC#1通道,此時(shí)在軟件上將原來離線仿真模型中從電機(jī)仿真模型得到的電流反饋信號(hào)用DS2001_B1(見圖3)的RTI接口模塊替換,并進(jìn)行簡單的單位換算以保證最終參與運(yùn)算的電流值與實(shí)際的電流值大小一致。離線仿真模型經(jīng)過dSPACE的RTI模塊替換之后,同時(shí)將仿真模型中的電機(jī)用實(shí)際電機(jī)代替就可以得到Matlab/Simulink實(shí)驗(yàn)?zāi)P汀D3顯示了建立Matlab/Simulink實(shí)驗(yàn)?zāi)P偷某S玫膸追NRTI接口模塊:PWM接口RTI模塊(DS4002PWM3 OUT)、編碼器接口RTI模塊(DS3002HW INDEX B1 C1/DS3002POS_B1_C1)、A/D接口RTI模塊(DS2001_B1/DS2002_B1/DS2003_B1)和D/A接口RTI模塊(DS2102_B1)等。
3 基于DSPACE的電機(jī)控制系統(tǒng)實(shí)驗(yàn)開發(fā)步驟
在硬件實(shí)驗(yàn)平臺(tái)搭建完成后,基于dSPACE的電機(jī)控制系統(tǒng)實(shí)驗(yàn)開發(fā)步驟包括以下幾點(diǎn):
(1)Matlab/Simulink模型建立及離線仿真。利用Matlab/Simillink建立仿真對象的數(shù)學(xué)模型,設(shè)計(jì)控制方案,并對系統(tǒng)進(jìn)行離線仿真。
(2)輸入/輸出接口(I/O)的接入生成實(shí)驗(yàn)?zāi)P汀T贛atlab/Simulink中保留需要下載到dSPACE中的模塊,從RTI庫中選擇實(shí)時(shí)控制所需的I/O模塊,用硬件接口關(guān)系替換原來的邏輯連接關(guān)系,并對I/O參數(shù)進(jìn)行配置,在一些特殊情況下還需要設(shè)置軟硬件中斷優(yōu)先級(jí)。
(3)利用RTW和dSPACE提供的工具自動(dòng)生成代碼并下載。由于Matlab與dSPACE的無縫連接的特性,因此只需簡單的操作即可完成目標(biāo)系統(tǒng)的實(shí)時(shí)C代碼的生成、編譯、鏈接和下載,將模型下載為目標(biāo)板DS1005PPC上可運(yùn)行的程序。
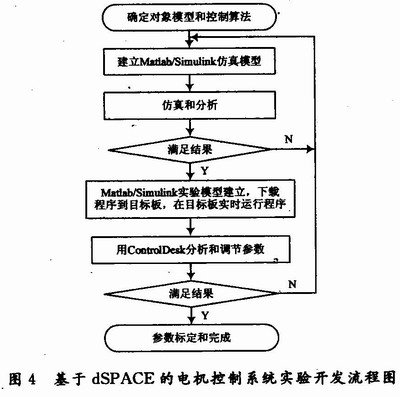
(4)dSPACE綜合實(shí)驗(yàn)和調(diào)試。利用dSPACE提供的ControlDesk軟件對實(shí)時(shí)運(yùn)算數(shù)據(jù)進(jìn)行獲取、改變參數(shù)并進(jìn)行實(shí)時(shí)控制等。圖4顯示了基于dSPACE的電機(jī)控制系統(tǒng)實(shí)驗(yàn)開發(fā)流程。
4 應(yīng)用實(shí)例
圖5(a)顯示了三相功率器件的一路PWM控制信號(hào)波形,圖5(b)為PWM控制信號(hào)經(jīng)過PWM信號(hào)反相和死區(qū)產(chǎn)生的硬件電路處理后得到的同一相的上、下功率器件的PWM開關(guān)信號(hào),可以明顯地看出在同一相的上、下功率器件的兩路PWM開關(guān)信號(hào)之間加入了防止直流母線直通的約4μs的死區(qū)時(shí)間。圖6給出了當(dāng)母線電壓Udc為30 V時(shí),常用的空間矢量脈寬調(diào)制SVPWM波形及其經(jīng)過高頻信號(hào)濾波后的線電壓波形圖。

5 結(jié)語
介紹了以先進(jìn)的快速算法驗(yàn)證實(shí)驗(yàn)設(shè)備dSPACE為控制核心,自行設(shè)計(jì)和擴(kuò)展相關(guān)的外圍硬件電路后搭建起基于dSPACE的電機(jī)控制系統(tǒng)實(shí)驗(yàn)平臺(tái)和實(shí)驗(yàn)開發(fā)步驟的詳細(xì)過程,并給出了利用上述平臺(tái)的應(yīng)用實(shí)例。利用此平臺(tái)可以大大縮短實(shí)驗(yàn)開發(fā)周期,有利于對控制算法的研究和實(shí)際應(yīng)用前的有效驗(yàn)證。