
在分析倍頻式SPWM并網(wǎng)逆變器電壓相量圖的基礎(chǔ)上,提出了一種基于TMS320LF2407DSP芯片作為控制器的并網(wǎng)逆變器實(shí)現(xiàn)方案。該方案實(shí)現(xiàn)簡(jiǎn)單,控制方便,相關(guān)的實(shí)驗(yàn)波形驗(yàn)證了該方案的正確性。
關(guān)鍵詞:逆變器;控制策略;電壓相量圖;數(shù)字信號(hào)處理器
0 引言
為了解決即將到來(lái)的能源危機(jī),開(kāi)發(fā)綠色的、可持續(xù)的新型能源已成為近年來(lái)的研究焦點(diǎn)。其中,能饋系統(tǒng)和光伏系統(tǒng)的研究與設(shè)計(jì)已取得一定成績(jī),而并網(wǎng)逆變器(又稱有源逆變器)作為它們與電網(wǎng)的接入口,扮演著極重要的角色。本文介紹一種采用TI公司TMS320LF2407DSP芯片實(shí)現(xiàn)的電壓型單相全橋并網(wǎng)逆變器,該逆變器基于電壓相量圖的間接電流控制,輸出為單位功率因數(shù),而且確保了其能量只能從逆變器到電網(wǎng)的單向流動(dòng),從而避免了能量倒灌帶來(lái)的逆變器功率器件的損壞。該方案控制簡(jiǎn)單,穩(wěn)定性好,具有較好的應(yīng)用效果。
1 控制策略及其實(shí)現(xiàn)
1.1 并網(wǎng)逆變器主電路
圖1為并網(wǎng)逆變器主電路框圖。圖中,高壓直流一般由低壓直流(例如,光伏系統(tǒng)中的蓄電池組,電子模擬負(fù)載系統(tǒng)中的電源模塊輸出)經(jīng)過(guò)DC/DC升壓后得到,幅值在400V左右,且電壓波動(dòng)范圍不大。逆變器輸出和電網(wǎng)之間的電感L1,用于濾除高次諧波電流,平衡逆變器和電網(wǎng)基波(50Hz)之間的電壓差,是整個(gè)系統(tǒng)控制策略的關(guān)鍵所在。這樣的電路結(jié)構(gòu)具有體積小,電流應(yīng)力小,畸變率小的優(yōu)點(diǎn),而且集中控制簡(jiǎn)單。
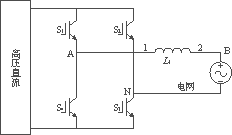
圖1 并網(wǎng)逆變器的主電路框圖
1.2 并網(wǎng)逆變器電壓相量圖分析
在功率因數(shù)為1的條件下,基波電壓向量可由圖2表示。圖中Ua為逆變器輸出電壓的基波有效值,UL為電感L1兩端電壓的基波有效值,UN為電網(wǎng)電壓。
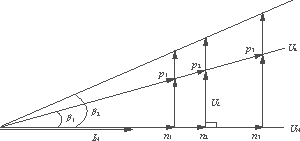
圖2 Ua、UL和UN相量圖
超前角度β=β1固定不變時(shí),設(shè)逆變器工作在p2n2點(diǎn),送至電網(wǎng)的功率為Po,由圖2的關(guān)系可知,Po=UNIN,UL=INωL1,據(jù)三角函數(shù)關(guān)系有
tanβ1=PoωL1/UN2(1)
可見(jiàn),在電感數(shù)值和電網(wǎng)電壓確定的條件下,依據(jù)給定的功率,可以確定超前角度β1,即可以確定逆變器控制信號(hào)的相位。
設(shè)電網(wǎng)電壓在n2點(diǎn)為標(biāo)準(zhǔn)220V,當(dāng)它降低(從n2到n1)或升高(從n2到n3)時(shí),逆變器的輸出電壓也隨之變化(從p2到p1或從p2到p3),可以保證工作在單位功率因數(shù),當(dāng)然送出的功率也會(huì)變化。由于電網(wǎng)電壓波動(dòng)不大,因此功率變化不會(huì)很大。這個(gè)調(diào)節(jié)過(guò)程的關(guān)系也可以由圖2得出
Uacosβ1=UN(2)
由SPWM逆變器有
Ua=mUd/![]() (3)
(3)
式中:m為調(diào)制比;
Ud為逆變器輸入側(cè)直流母線電壓。
由式(2)和(3)得
m=![]() UN/Udcosβ1(4)
UN/Udcosβ1(4)
從而可知,超前角度不變時(shí),根據(jù)實(shí)時(shí)檢測(cè)到的直流側(cè)電壓和電網(wǎng)電壓,改變調(diào)制比m,可以使得電路在直流母線電壓和電網(wǎng)電壓波動(dòng)時(shí),一直工作在單位功率因數(shù)。
當(dāng)β從β1增大到β2時(shí),其它條件不變,功率會(huì)隨之增大,其變化關(guān)系可以由式(1)確定。因此,我們可以通過(guò)外圍電路設(shè)定β值,從而達(dá)到功率調(diào)節(jié)。
1.3 控制單元框圖
如圖3所示,控制單元上主要是通過(guò)外圍檢測(cè)電路和相應(yīng)的軟件算法來(lái)實(shí)現(xiàn)的。軟件的實(shí)現(xiàn)在后文中闡述。其中DC/DC的控制與保護(hù)部分可以與逆變部分分開(kāi),但由于DSP的資源比較豐富,可以利用同一塊DSP來(lái)處理。
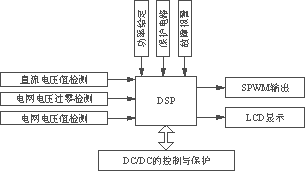
圖3 控制單元框圖
由于主電路與電網(wǎng)沒(méi)有隔離,則控制單元須全部與主電路隔離。電網(wǎng)電壓的檢測(cè)可通過(guò)工頻采樣變壓器實(shí)現(xiàn),但直流電壓的檢測(cè)相對(duì)要困難。這里采用線性光耦來(lái)達(dá)到采樣和隔離的目的,這就要求線性光耦的線性度非常高。采樣電路如圖4所示。
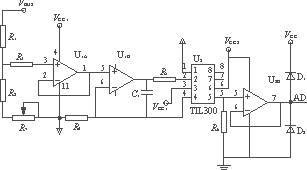
圖4 直流母線電壓采樣電路
本電路采用TIL300線性光耦,經(jīng)采樣隔離后的值送至DSP的AD轉(zhuǎn)換通道。由圖4所示電路可知,AD采樣值Vo=k3(R6/R4)![]() VBUS,其中k3是光耦的電流傳輸系數(shù)。
VBUS,其中k3是光耦的電流傳輸系數(shù)。
電網(wǎng)過(guò)零檢測(cè)主要是利用DSP的CAP捕捉單元來(lái)實(shí)現(xiàn)鎖相。以檢測(cè)到的過(guò)零時(shí)刻作為基準(zhǔn),控制脈沖超前此基準(zhǔn)時(shí)刻β角度。過(guò)流及電網(wǎng)過(guò)大波動(dòng)的保護(hù)是由電流間接控制,為電流開(kāi)環(huán)控制,因此,應(yīng)根據(jù)所需的功率大小以及器件的額定值設(shè)好保護(hù)點(diǎn)。當(dāng)發(fā)生過(guò)流時(shí),通過(guò)保護(hù)電路封鎖逆變控制脈沖,并斷開(kāi)主電路,使逆變器脫離電網(wǎng)。當(dāng)檢測(cè)到的電網(wǎng)電壓超出波動(dòng)范圍時(shí),也使逆變器停止工作,并給出相應(yīng)的故障指示信號(hào)。
2 軟件設(shè)計(jì)與實(shí)現(xiàn)
逆變器的控制方式是在文獻(xiàn)[2]中的倍頻式SPWM基礎(chǔ)上,結(jié)合DSP的PWM輸出特性產(chǎn)生的,如圖5所示。實(shí)際中,三角波的頻率與工頻的比值為240,為簡(jiǎn)單起見(jiàn),圖5中的比值為12。
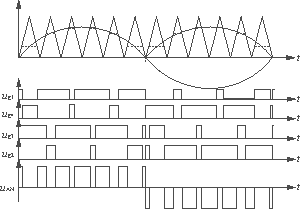
圖5 開(kāi)關(guān)器件的驅(qū)動(dòng)波形和逆變器輸出波形
波形生成過(guò)程如下:DSP的通用定時(shí)器1采用連續(xù)增/減計(jì)數(shù)模式,而且在定時(shí)器下溢中斷后立即裝載比較寄存器CMPR1和CMPR2的值,CMPR1決定ug1和ug4,CMPR2決定ug3和ug2。在DSP的數(shù)據(jù)存儲(chǔ)區(qū)有一90°的正弦表,對(duì)應(yīng)360個(gè)點(diǎn),此表作相應(yīng)調(diào)整可以產(chǎn)生90°~360°的正弦值,而裝載值是在每個(gè)三角波中心時(shí)刻所對(duì)應(yīng)的正弦值。
在一個(gè)工頻周期,定時(shí)器1產(chǎn)生240次下溢中斷,設(shè)第M次中斷時(shí)裝載的值對(duì)應(yīng)正弦表中第K個(gè)值,在4個(gè)不同的象限時(shí),M和K的關(guān)系如下:
K=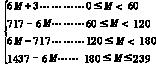 (5)
(5)
M的初值決定圖2中超前角度β的大小。例如,M=0表示β=0;M=4,則表示β=6°,因此,我們可以通過(guò)改變M的初值實(shí)現(xiàn)功率調(diào)節(jié)。市電過(guò)零檢測(cè)對(duì)應(yīng)的CAP捕捉中斷子程序中設(shè)定所需的M初始值。
由圖6可以看出,在0~180°之間,CMPR1在M為偶數(shù)時(shí)裝載查表所得值,PWM輸出產(chǎn)生跳變,而在M為奇數(shù)時(shí)裝載大于周期寄存器里面的值,使之不產(chǎn)生跳變;CMPR2與之相反,在180°~360°之間時(shí),CMPR1和CMPR2的裝載情況剛好與前面相反。這就帶來(lái)在180°和240°時(shí)存在輸出方式的變換,如在M=120(即180°)時(shí),ug1由低有效變?yōu)閺?qiáng)制低,而當(dāng)M=121后,全部是高有效。而ug3在M=120時(shí)先強(qiáng)制低,緊接著高有效。這需要作特別處理。
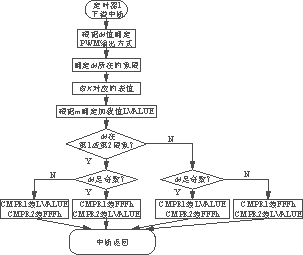
圖6 定時(shí)器中斷子程序流程圖
由于調(diào)制比m隨著直流母線電壓和電網(wǎng)電壓的波動(dòng)而改變,所以,通過(guò)查表結(jié)果裝載到CMPR1和CMPR2的值還必須乘以m的值。
3 實(shí)驗(yàn)波形
結(jié)合上述控制策略,設(shè)計(jì)了一臺(tái)輸出功率為2kW的并網(wǎng)逆變器,400V的直流電壓由一直流模塊提供,功率管采用富士電機(jī)的1MBH60D-100型號(hào)的IGBT,L1為5mH。圖7(a)是電網(wǎng)電壓和逆變器輸出電流波形(為了便于觀看,電流信號(hào)反相),圖7(b)是電感上的電壓波形。

(a)uN與-iL1波形
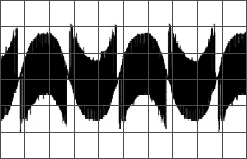
(b)uL1波形
圖7 實(shí)驗(yàn)實(shí)測(cè)波形
4 結(jié)語(yǔ)
逆變器可以很好地工作在單位功率因數(shù)的工況下,而且在電網(wǎng)波動(dòng)和直流側(cè)波動(dòng)時(shí)具有很好的穩(wěn)定性。此控制方法具有控制簡(jiǎn)單,電流畸變小的優(yōu)點(diǎn),具有一定的應(yīng)用前景。