
0 引言[1]
傳統(tǒng)上把具有梯形波反電勢的永磁同步電機稱為直流無刷電機。直流無刷電機的轉(zhuǎn)矩控制需要轉(zhuǎn)子位置信息來實現(xiàn)有效的定子電流控制。而且,對于轉(zhuǎn)速控制,也需要速度信號,使用位置傳感器是直流無刷電機矢量控制的基礎(chǔ),但是,位置傳感器的存在也給直流無刷電機的應(yīng)用帶來很多的缺陷與不便 :首先,位置傳感器會增加電機的體積和成本;其次,
連線眾多的位置傳感器會降低電機運行的可靠性,即便是現(xiàn)在應(yīng)用最多的霍爾傳感器,也存在一定程度的磁不敏感區(qū);再次,在某些惡劣的工作環(huán)境、例如在密封的空調(diào)壓縮機中,由于制冷劑的強腐蝕性 ,常規(guī)的位置傳感器根本無法使用;最后,傳感器的安裝精度還會影響電機的運行性能,增加了生產(chǎn)的工藝難度。
為了降低硬件的成本和復(fù)雜性、增加機械魯棒性和驅(qū)動系統(tǒng)的可靠性和減少維護的需要,又不增加系統(tǒng)慣量并能減小噪音的要求,最理想的就是取消矢量控制系統(tǒng)中的位置傳感器。
所謂無位置傳感器的直流無刷電機控制技術(shù) ,正確的理解應(yīng)該是無機械的位置傳感器控制技術(shù)。在電機運轉(zhuǎn)的過程中,作為控制逆變器換相導(dǎo)通時序的轉(zhuǎn)子位置信號仍然是需要的,只不過這種信號不再由機械式的位置傳感器來提供,而由新的位置檢測信號電路來代替、即以提高電路和控制的復(fù)雜性來降低電機的復(fù)雜性。所以,直流無刷電機無位置傳感器控制技術(shù)的核心和關(guān)鍵就是構(gòu)建一個轉(zhuǎn)子位置信號檢測電路,從軟、硬件兩個方面來間接獲得正觸發(fā)相應(yīng)的逆變器,從而驅(qū)動電 確的轉(zhuǎn)子位置信號,機運轉(zhuǎn)。要做到精確控制需要相當復(fù)雜且快速的運算,一般的微處理是器難以實現(xiàn)的,但是,數(shù)字信號處理器以其強大的運算功能使這種控制方式成為現(xiàn)實。
1 基于反電勢的轉(zhuǎn)子位置檢測方案[2]
直流無刷電機的反電勢幅值是與位置相關(guān)的。這樣,如果它可以精確地檢測到,就可以得到實時的精確轉(zhuǎn)子位置,從而用來控制逆變器的開關(guān)方式。這種方法的缺點是:電機靜止或低速時的反電勢信號為零或很小,難以得到有效的換向信號,因此系統(tǒng)的低速性能差,電機啟動需要特別的硬件電路或?qū)iT的軟件啟動方法。
當電機速度大于零時,每個電周期內(nèi)某相反電勢為零的位置只有兩個,可以從圖1 所示通過過零點時反電勢的斜率來區(qū)分這些位置,每一段對應(yīng)電周期內(nèi)的60°區(qū)間。換向發(fā)生在每一段的邊界處,反電勢過零點和需要換向的位置之間有30°的偏移,需要對其進行補償。

圖1反電勢過零點
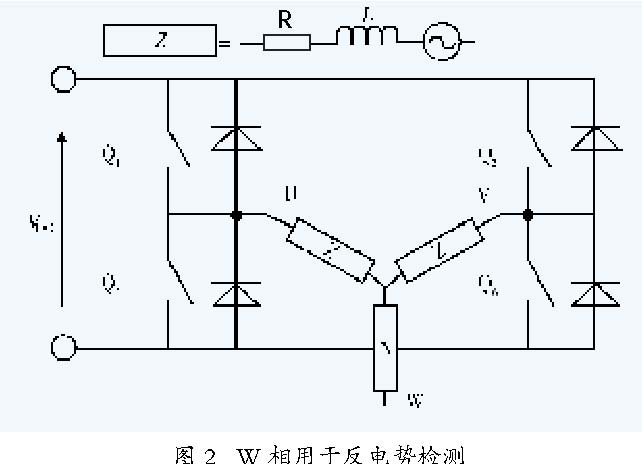
在任一時刻只有兩相通電,且流經(jīng)這兩相的電流相反,圖2 所示為W 相用于反電勢檢測時的情況。當U 相內(nèi)流經(jīng)正向電流(定義為流向星型連接中心點的電流),V 相內(nèi)流經(jīng)負相電流時,對應(yīng)圖1 中區(qū)間6Q和1Q時,此置位的1動作。假設(shè)通電相的兩端總是對稱地分別連接到DC 電源地兩個端點上,則星型連接中心點的電壓總是1/2VDC,與加在這兩個通電相繞組上的電壓極性無關(guān)。但是,只有在每相的R、L 和反電勢
都相同,且每相的開關(guān)管壓降都相等的情況下,星型連接中心點的電壓值才為1/2V DCC。假設(shè)現(xiàn)在的情況就是這樣,反電勢過零點將被偏置1/2V DC。
上述方法很容易通過硬件實現(xiàn),即通過分壓電路對三相的端電壓和VDC 分別進行采樣,并將采樣值送入比較器的比較端口,得到的過零點時刻即為1/2VDC 的時刻。使用一個可用的定某相反電勢經(jīng)過時器測量60°(即兩次反電勢過零點之間)的時間。將這個值除以2,然后加載到另一個定時器中,這樣就可以補償正確換向所需的30°偏移量。
2 DSP 控制方案的系統(tǒng)實現(xiàn)[3] [4]
2.1 TMS320LF240x 芯片簡介
TMS320LF240x 系列DSP 是TI 公司為滿足大范圍的數(shù)字電動機控制(DMC)應(yīng)用而設(shè)計的。該芯片具有高性能的16 位定點DSP 內(nèi)核,采用改進的哈佛總線結(jié)構(gòu),具有專門的硬件乘法器,采用流水線操作,具有30MIPS 的處理能力,大多數(shù)指令在單周期內(nèi)即可執(zhí)行完成。同時,該芯片集成了豐富的片內(nèi)外設(shè),包括事件管理器、模數(shù)轉(zhuǎn)換器(ADC )、串行通信接口(SCI)和串行外部設(shè)備接口(SPI)、系統(tǒng)保護(如低電壓檢測和看門狗定時器)等。TMS320LF240x 可以實現(xiàn)用軟件取代模擬器件,完成復(fù)雜的控制算法,方便地修改控制策略,修正控制參數(shù),能滿足無傳感器直流無刷電機控制系統(tǒng)對實時控制的要求。
2.2 DSP 控制系統(tǒng)的硬件實現(xiàn)
圖3 是根據(jù)前述控制原理設(shè)計的基于DSP 的直流無刷電機控制系統(tǒng)。該系統(tǒng)主要由直流無刷電機、功率變換器電路、電機轉(zhuǎn)子位置檢測電路、各種保護電路以及以TMS320LF240x 為核心的數(shù)字控制器等構(gòu)成,其中功率變換器電路由整流濾波電路、逆變器電路(IPM 功率模塊)和相應(yīng)的保護電路組成。

圖3 DSP 控制系統(tǒng)
逆變器電路中的IPM 模塊集成了多種保護功能,如過電壓保護、欠電壓保護以及過流保護等,當達到保護閾值時,IPM 模塊通過FO 引腳輸出一個低電平信號,并將此低電平信號送入DSP 的PDPINTx 引腳,觸發(fā)功率驅(qū)動保護中斷,將所有PWM 輸出引腳設(shè)置為高阻態(tài),以此來關(guān)斷驅(qū)動信號,起到保護電路的作用。
轉(zhuǎn)子位置檢測電路采用1/2 電壓采樣法來實現(xiàn),對電機的三相端電壓及直流母線電壓分別進行采樣,并將采樣結(jié)果送入比較器進行比較,從而得到過零點的時刻,其結(jié)果送入DSP 的捕捉端口中。
0 引言[1]
傳統(tǒng)上把具有梯形波反電勢的永磁同步電機稱為直流無刷電機。直流無刷電機的轉(zhuǎn)矩控制需要轉(zhuǎn)子位置信息來實現(xiàn)有效的定子電流控制。而且,對于轉(zhuǎn)速控制,也需要速度信號,使用位置傳感器是直流無刷電機矢量控制的基礎(chǔ),但是,位置傳感器的存在也給直流無刷電機的應(yīng)用帶來很多的缺陷與不便 :首先,位置傳感器會增加電機的體積和成本;其次,
連線眾多的位置傳感器會降低電機運行的可靠性,即便是現(xiàn)在應(yīng)用最多的霍爾傳感器,也存在一定程度的磁不敏感區(qū);再次,在某些惡劣的工作環(huán)境、例如在密封的空調(diào)壓縮機中,由于制冷劑的強腐蝕性 ,常規(guī)的位置傳感器根本無法使用;最后,傳感器的安裝精度還會影響電機的運行性能,增加了生產(chǎn)的工藝難度。
為了降低硬件的成本和復(fù)雜性、增加機械魯棒性和驅(qū)動系統(tǒng)的可靠性和減少維護的需要,又不增加系統(tǒng)慣量并能減小噪音的要求,最理想的就是取消矢量控制系統(tǒng)中的位置傳感器。
所謂無位置傳感器的直流無刷電機控制技術(shù) ,正確的理解應(yīng)該是無機械的位置傳感器控制技術(shù)。在電機運轉(zhuǎn)的過程中,作為控制逆變器換相導(dǎo)通時序的轉(zhuǎn)子位置信號仍然是需要的,只不過這種信號不再由機械式的位置傳感器來提供,而由新的位置檢測信號電路來代替、即以提高電路和控制的復(fù)雜性來降低電機的復(fù)雜性。所以,直流無刷電機無位置傳感器控制技術(shù)的核心和關(guān)鍵就是構(gòu)建一個轉(zhuǎn)子位置信號檢測電路,從軟、硬件兩個方面來間接獲得正觸發(fā)相應(yīng)的逆變器,從而驅(qū)動電 確的轉(zhuǎn)子位置信號,機運轉(zhuǎn)。要做到精確控制需要相當復(fù)雜且快速的運算,一般的微處理是器難以實現(xiàn)的,但是,數(shù)字信號處理器以其強大的運算功能使這種控制方式成為現(xiàn)實。
1 基于反電勢的轉(zhuǎn)子位置檢測方案[2]
直流無刷電機的反電勢幅值是與位置相關(guān)的。這樣,如果它可以精確地檢測到,就可以得到實時的精確轉(zhuǎn)子位置,從而用來控制逆變器的開關(guān)方式。這種方法的缺點是:電機靜止或低速時的反電勢信號為零或很小,難以得到有效的換向信號,因此系統(tǒng)的低速性能差,電機啟動需要特別的硬件電路或?qū)iT的軟件啟動方法。
當電機速度大于零時,每個電周期內(nèi)某相反電勢為零的位置只有兩個,可以從圖1 所示通過過零點時反電勢的斜率來區(qū)分這些位置,每一段對應(yīng)電周期內(nèi)的60°區(qū)間。換向發(fā)生在每一段的邊界處,反電勢過零點和需要換向的位置之間有30°的偏移,需要對其進行補償。
圖1反電勢過零點
在任一時刻只有兩相通電,且流經(jīng)這兩相的電流相反,圖2 所示為W 相用于反電勢檢測時的情況。當U 相內(nèi)流經(jīng)正向電流(定義為流向星型連接中心點的電流),V 相內(nèi)流經(jīng)負相電流時,對應(yīng)圖1 中區(qū)間6Q和1Q時,此置位的1動作。假設(shè)通電相的兩端總是對稱地分別連接到DC 電源地兩個端點上,則星型連接中心點的電壓總是1/2VDC,與加在這兩個通電相繞組上的電壓極性無關(guān)。但是,只有在每相的R、L 和反電勢
都相同,且每相的開關(guān)管壓降都相等的情況下,星型連接中心點的電壓值才為1/2V DCC。假設(shè)現(xiàn)在的情況就是這樣,反電勢過零點將被偏置1/2V DC。
上述方法很容易通過硬件實現(xiàn),即通過分壓電路對三相的端電壓和VDC 分別進行采樣,并將采樣值送入比較器的比較端口,得到的過零點時刻即為1/2VDC 的時刻。使用一個可用的定某相反電勢經(jīng)過時器測量60°(即兩次反電勢過零點之間)的時間。將這個值除以2,然后加載到另一個定時器中,這樣就可以補償正確換向所需的30°偏移量。
2 DSP 控制方案的系統(tǒng)實現(xiàn)[3] [4]
2.1 TMS320LF240x 芯片簡介
TMS320LF240x 系列DSP 是TI 公司為滿足大范圍的數(shù)字電動機控制(DMC)應(yīng)用而設(shè)計的。該芯片具有高性能的16 位定點DSP 內(nèi)核,采用改進的哈佛總線結(jié)構(gòu),具有專門的硬件乘法器,采用流水線操作,具有30MIPS 的處理能力,大多數(shù)指令在單周期內(nèi)即可執(zhí)行完成。同時,該芯片集成了豐富的片內(nèi)外設(shè),包括事件管理器、模數(shù)轉(zhuǎn)換器(ADC )、串行通信接口(SCI)和串行外部設(shè)備接口(SPI)、系統(tǒng)保護(如低電壓檢測和看門狗定時器)等。TMS320LF240x 可以實現(xiàn)用軟件取代模擬器件,完成復(fù)雜的控制算法,方便地修改控制策略,修正控制參數(shù),能滿足無傳感器直流無刷電機控制系統(tǒng)對實時控制的要求。
2.2 DSP 控制系統(tǒng)的硬件實現(xiàn)
圖3 是根據(jù)前述控制原理設(shè)計的基于DSP 的直流無刷電機控制系統(tǒng)。該系統(tǒng)主要由直流無刷電機、功率變換器電路、電機轉(zhuǎn)子位置檢測電路、各種保護電路以及以TMS320LF240x 為核心的數(shù)字控制器等構(gòu)成,其中功率變換器電路由整流濾波電路、逆變器電路(IPM 功率模塊)和相應(yīng)的保護電路組成。
圖3 DSP 控制系統(tǒng)
逆變器電路中的IPM 模塊集成了多種保護功能,如過電壓保護、欠電壓保護以及過流保護等,當達到保護閾值時,IPM 模塊通過FO 引腳輸出一個低電平信號,并將此低電平信號送入DSP 的PDPINTx 引腳,觸發(fā)功率驅(qū)動保護中斷,將所有PWM 輸出引腳設(shè)置為高阻態(tài),以此來關(guān)斷驅(qū)動信號,起到保護電路的作用。
轉(zhuǎn)子位置檢測電路采用1/2 電壓采樣法來實現(xiàn),對電機的三相端電壓及直流母線電壓分別進行采樣,并將采樣結(jié)果送入比較器進行比較,從而得到過零點的時刻,其結(jié)果送入DSP 的捕捉端口中。
2.3 DSP 控制系統(tǒng)的軟件設(shè)計
本控制系統(tǒng)采用速度、電流雙閉環(huán)的控制結(jié)構(gòu)。由于采用了面向電機控制的高速DSP,無論是速度環(huán)的設(shè)計,還是電流環(huán)的實現(xiàn),以及各種反饋信號的處理和PWM 控制信號的產(chǎn)生,均采用了數(shù)字信號處理技術(shù),用軟件實現(xiàn)硬件電路的功能,完成直流無刷電機的實時控制。
控制系統(tǒng)的軟件設(shè)計主要包括DSP 初始化程序和電機控制程序兩部分。DSP 初始化程序主要完成系統(tǒng)時鐘的設(shè)定,中斷向量的定義,I/O 端口的初始化,控制寄存器的設(shè)置以及各功能模塊的初始化等;電機控制程序主要負責電機的啟動控制、速度電流雙閉環(huán)控制、系統(tǒng)監(jiān)控和故障處理等,因此電機控制程序包括啟動子程序、電流和位置檢測中斷服務(wù)子程序、速度控制子程序、電流控制子程序、PWM 調(diào)制子程序以及系統(tǒng)監(jiān)控和故障處理子程序等。
進行各種反饋信號的檢測是構(gòu)成雙閉環(huán)控制的前提。位置信號、電流信號的檢測分別由位置檢測中斷服務(wù)程序和電流檢測中斷服務(wù)程序來實現(xiàn),轉(zhuǎn)速的檢測通過軟件計算間接獲得。為了提高系統(tǒng)的動態(tài)性能和穩(wěn)態(tài)精度,本系統(tǒng)電流環(huán)采用PID 調(diào)節(jié)器, 速度環(huán)采用遇限削弱積分分離PI 控制算法。其控制環(huán)路簡圖如圖4 所示。

圖4 電流和速度控制環(huán)路
PWM 調(diào)制子程序根據(jù)檢測到的轉(zhuǎn)子位置信號和電流信號通過事件管理器(EV)產(chǎn)生PWM 調(diào)制信號。通過定時器控制寄存器TxCON 中的位模式將通用定時器的計數(shù)模式設(shè)置為連續(xù)增/ 減計數(shù)模式以產(chǎn)生對稱的PWM 波形。另外,TMS320LF240x 的事件管理器具有可編程的死區(qū)單元,通過死區(qū)定時器控制寄存器(DBTCONx )設(shè)置死區(qū)時間,從而避免逆變器同一橋臂上的兩個功率器件發(fā)生直通故障。
2.4 電機的啟動方案
由于直流無刷電機在靜止及低速運行時難以正確檢測反電勢信號,因此必須解決電機在靜止狀態(tài)下啟動的問題。以往曾有多種啟動方法,但有的要增加復(fù)雜的啟動電路,有的則要與電機特性聯(lián)系密切, ,實現(xiàn)起來難度較大、且可靠性較低。
本系統(tǒng)采用三段式的方法單純利用軟件來實現(xiàn)電機啟動,將電機的啟動過程分為預(yù)定位、強制運行與同步切換三個階段。在電機靜止時,轉(zhuǎn)子的初始位置未知,需要給設(shè)定的兩相電樞繞組通以短暫的電流,使轉(zhuǎn)子磁極穩(wěn)定在這兩相繞組合成磁場的軸線上,以此作為轉(zhuǎn)子磁極初始位置(即預(yù)定位)。然后按定、轉(zhuǎn)子磁極間正確的空間相位關(guān)系使相應(yīng)的功率器件導(dǎo)通,并以固定的時間進行模式切換,在這段時間內(nèi)反電勢幅值較小,不宜進行過零檢測。隨著電機轉(zhuǎn)速逐漸升高,反電勢也逐漸增大,當反電勢升高到一定程度時,通過端電壓檢測就可以正確檢測到轉(zhuǎn)子位置,此時開啟過零檢測模塊,當連續(xù)多次正確檢測到過零點之后,就可從開環(huán)強制運行階段切換到閉環(huán)同步運行階段,從而完成整個啟動過程。
3實驗結(jié)果
將前述控制方案應(yīng)用在直流變頻空調(diào)壓縮機系統(tǒng)上進行實驗驗證,電機極對數(shù)為2,PWM 載波頻率設(shè)為5 kHz,最大輸出功率為2 kW,調(diào)速范圍為15~ ~110 Hz 。實驗證明,該系統(tǒng)啟動平穩(wěn),調(diào)速控制系統(tǒng)實時性好,具有良好的控制性能。圖5 是無刷直流電機三相電壓的波形,圖6 是無刷直流電機三相電流的波形,從波形圖中可以看出,輸出波形具有較高的質(zhì)量,從而表明該系統(tǒng)采用的控制策略和算法的可行性和和實用性。

圖5 三相電壓波形

圖6 三相電流波形
4結(jié)語
直流無刷電機具有效率高、功率密度大、功率因數(shù)高、體積小、控制精度高等優(yōu)點,其應(yīng)用范圍非常廣泛。直流無刷電機的控制技術(shù)正在從傳統(tǒng)的有位置傳感器的閉環(huán)PID 控制過渡到無位置傳感器的智能控制,其調(diào)速范圍、轉(zhuǎn)矩脈動、系統(tǒng)魯棒性等性能都在不斷提高。
在充分利用了TMS320LF240x 的強大實時計算能力和片內(nèi)豐富的集成器件的基礎(chǔ)上,設(shè)計了基于DSP 的無位置傳感器直流無刷電機的控制方案,并給出了控制系統(tǒng)的軟、硬件結(jié)構(gòu)。該控制系統(tǒng)具有良好的控制性能和調(diào)速性能,可以獲得較好的動態(tài)特性和較高的穩(wěn)態(tài)精度,運行效率高,抗干擾能力強,具有較高的實際應(yīng)用價值。
作者簡介:
梁博(1978-), 男,工程師,清華大學(xué)精密儀器系2000 屆畢業(yè)生,現(xiàn)工作于珠海格力電器研究院,主要研究方向為電力電子技術(shù)。
參考文獻:
[1] 陳伯時,陳敏遜。 交流調(diào)速系統(tǒng)[M]。 北京:機械工業(yè)出版社,2000.
[2] 張琛。 直流無刷電動機原理及應(yīng)用[M]。 北京:機械工業(yè)出版社,1996.
[3] TM S320LF240xA DSP Controllers Reference Guide System and Peripherals [Z]。 Texas Instruments Inc Literature Number: SPRU357B, 2001。
[4] Implementation of a Sensorless Speed Controlled Brushless DC DriveUsing TMS320LF240[Z].TexasInstrumentsInc Literature Number: SPRA072, 1997.