

第一次管道中的現(xiàn)場(chǎng)測(cè)試
作者:
Ricardo Artigas Langer - EngeMOVI
行業(yè):
能源/電力, 石油與天然氣/ 煉油/ 化工
產(chǎn)品:
實(shí)時(shí)模塊, FPGA模塊, LabVIEW, cRIO-9014
挑戰(zhàn):
尋找石油或者天然氣管道的參考位置,并確保空間誤差小于1米
解決方案:
通過使用LabVIEW實(shí)時(shí)模塊和NI CompactRIO,設(shè)計(jì)和實(shí)現(xiàn)一個(gè)實(shí)時(shí)數(shù)據(jù)采集和處理系統(tǒng),以管理在石油或者天然氣管道內(nèi)部通行的慣性導(dǎo)航系統(tǒng)(INS)的數(shù)據(jù)。系統(tǒng)實(shí)現(xiàn)了對(duì)數(shù)據(jù)的采集、預(yù)處理和儲(chǔ)存,還可以利用LabVIEW對(duì)數(shù)據(jù)進(jìn)行后處理,以獲得最終結(jié)果。
"借助于LabVIEW,我們很容易實(shí)現(xiàn)對(duì)PIG(檢管器)的編程,以滿足任務(wù)要求。并且,我們還使用了相同的程序設(shè)計(jì)語言開發(fā)一個(gè)后處理程序,以便轉(zhuǎn)換采集的大多數(shù)數(shù)據(jù)。"

PIG(檢管器)是一個(gè)用于石油和天然氣管道檢驗(yàn)的工具,它插入管道中并且借助于關(guān)內(nèi)液體流動(dòng)產(chǎn)生的壓力前進(jìn)。PIG可以檢驗(yàn)管道的變形和異常腐蝕情況,有助于排查可能造成生態(tài)事故的故障。為了降低成本并且在監(jiān)測(cè)到異常情況后盡快更換管道,我們必須要知道異常現(xiàn)象的參考位置。慣性PIG被設(shè)計(jì)用于檢測(cè)由地形運(yùn)動(dòng)產(chǎn)生的管道移位。
由于慣性PIG在地面以下運(yùn)行,被管道所屏蔽,我們不可能獲得連續(xù)的GPS信號(hào)。所以慣性PIG必須使用INS(慣性導(dǎo)航系統(tǒng))來測(cè)量加速度和角速度,并通過綜合的數(shù)據(jù)分析,獲得儀器的速度、位置和方向。然而,由系統(tǒng)中還夾雜了由偏移和噪音等因素造成的傳感器不精確的問題,隨著時(shí)間的推移,定位準(zhǔn)確度會(huì)下降。
一種避免偏移的有效方式是添加輔助測(cè)量。我們使用里程表和一些沿管道的GPS參考導(dǎo)航點(diǎn),以便及時(shí)更新定位的位置。這些GPS標(biāo)記借助于管道外的傳感器采集到PIG通過的瞬間,并與檢管器的慣性導(dǎo)航系統(tǒng)同步。GPS和INS的結(jié)合的測(cè)量方式被稱作GPS輔助慣性導(dǎo)航。這種結(jié)構(gòu)允許根據(jù)用于動(dòng)態(tài)系統(tǒng)的迭代狀態(tài)估計(jì)法(卡爾曼濾波器Kalman Filter)進(jìn)行軌跡的尋跡和登記。雖然設(shè)置更多GPS點(diǎn)可以減少系統(tǒng)誤差,但是這需要技術(shù)團(tuán)隊(duì)花費(fèi)更多的準(zhǔn)備時(shí)間。因此,我們選擇了更節(jié)省成本的方案。
執(zhí)行慣性PIG任務(wù)的計(jì)算機(jī)必須滿足一些要求,包括在啟動(dòng)之前對(duì)現(xiàn)場(chǎng)所有傳感器進(jìn)行復(fù)雜狀態(tài)檢查,以避免影響整個(gè)任務(wù)。它還必須在高采集頻率下,在60多個(gè)小時(shí)內(nèi)持續(xù)實(shí)現(xiàn)對(duì)20多個(gè)傳感器的管理。由于系統(tǒng)對(duì)耐溫性要求高,并且必須能夠抵御超過20G的沖擊,還需要足夠的小以放置到PIG內(nèi)部,所以目前沒有任何現(xiàn)成可用的硬盤可以在管道內(nèi)存儲(chǔ)這些數(shù)據(jù)。因此,我們?cè)赑IG內(nèi)實(shí)施了實(shí)時(shí)統(tǒng)計(jì)無損耗浮點(diǎn)數(shù)據(jù)壓縮法。
我們采用了一個(gè)帶有現(xiàn)場(chǎng)可編程門陣列(FPGA)的NI cRIO-9014控制器,它小巧靈活,抗振性好,并且功能強(qiáng)大,足以滿足PIG任務(wù)的苛刻要求。我們還使用了強(qiáng)大而易用的LabVIEW開發(fā)平臺(tái)進(jìn)行編程。圖一中展示了慣性PIG的硬件架構(gòu)。
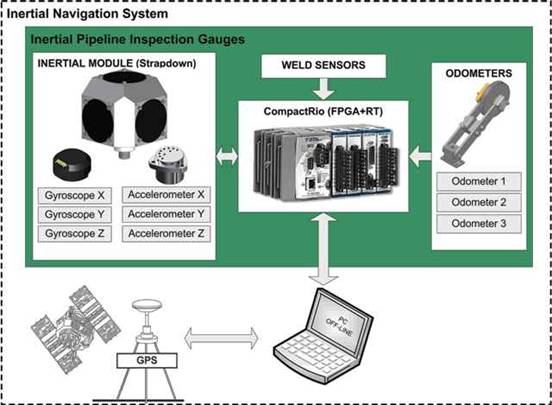
圖1 PIG硬件架構(gòu)
借助于LabVIEW,我們很容易對(duì)PIG進(jìn)行編程,以滿足任務(wù)要求,并且還開發(fā)一個(gè)后處理程序,以便把采集到的大量數(shù)據(jù)轉(zhuǎn)換成管道中焊接點(diǎn)的參考位置。CompactRIO的FTP和TCP功能可以簡(jiǎn)化所有采集的數(shù)據(jù)的采集,還可以使用任何計(jì)算機(jī)或者PDA遠(yuǎn)程配置任務(wù)參數(shù)。
通過對(duì)任務(wù)中計(jì)算機(jī)VI進(jìn)行遠(yuǎn)程訪問,我們可以很容易診斷原型機(jī)的可能故障。這就使團(tuán)隊(duì)能夠集中精神于開發(fā)數(shù)學(xué)算法,而非通信協(xié)議,來進(jìn)行數(shù)據(jù)融合和統(tǒng)計(jì)分析。最終,借助于LabVIEW對(duì)于多核的支持,這些算法在乘以經(jīng)過慣性導(dǎo)航和卡爾曼濾波器的狀態(tài)空間估計(jì)的數(shù)千個(gè)矩陣之后,運(yùn)行的更快。
項(xiàng)目開發(fā)僅用了18個(gè)時(shí)間,還包括了在完成機(jī)械設(shè)計(jì)之前所進(jìn)行的一系列測(cè)試。因?yàn)槲覀冊(cè)O(shè)計(jì)的是能夠輸送液體而非固體的管道,我們必須實(shí)現(xiàn)一個(gè)復(fù)雜的懸浮系統(tǒng),以保證INS的正常工作。檢管器計(jì)算不正確,在管道內(nèi)會(huì)有很多因素會(huì)導(dǎo)致PIG被破壞,例如閥門、轉(zhuǎn)角、縫隙、限位器、液體流量,甚至是非法安裝的用于偷竊燃料的閥門。因此,硬件和軟件的開發(fā)必須與機(jī)械設(shè)計(jì)同時(shí)進(jìn)行,以避免造成整個(gè)項(xiàng)目延遲的。
在開發(fā)過程中,我們需要一個(gè)平臺(tái)用于測(cè)試算法。我們?cè)谝惠v自行車上安裝了CompactRIO控制器和傳感器(圖2),并且按照和在管道內(nèi)使用PIG繪制路徑地圖一樣的方式來繪制路徑地圖。

圖2 使用自行車進(jìn)行現(xiàn)場(chǎng)試驗(yàn)
雖然我們從這個(gè)試驗(yàn)平臺(tái)收集了許多數(shù)據(jù),但是自行車比管道具有更多的自由度;因此最終我們用軌道小車(圖3)來代替自行車,它提供了一個(gè)更像最終真實(shí)運(yùn)行條件的試驗(yàn)平臺(tái)。

圖3 使用軌道小車進(jìn)行現(xiàn)場(chǎng)試驗(yàn)
最后,在裝配好PIG機(jī)械結(jié)構(gòu)后,我們?cè)诠艿郎线M(jìn)行了現(xiàn)場(chǎng)試驗(yàn)。之前所提到的每個(gè)現(xiàn)場(chǎng)試驗(yàn)平臺(tái)都具有不同的特性,而LabVIEW可以快速適應(yīng)于每個(gè)現(xiàn)場(chǎng)試驗(yàn)平臺(tái),以保證項(xiàng)目按時(shí)完成。我們利用NI的產(chǎn)品開發(fā)了所有軟件,而一段文本代碼都不用寫。
在巴西和哥倫比亞,在投入商業(yè)使用將近一年的時(shí)間里,CompactRIO控制器經(jīng)受了各種苛刻的考驗(yàn)。其中有一次,由于對(duì)接收程序的錯(cuò)誤操作造成慣性PIG與管道底部正面相撞,撞擊力非常大,破環(huán)PIG小車間的聯(lián)軸器。這些由8毫米粗的鋼條制成聯(lián)軸器完全扭曲,并穿透了PIG外殼,到達(dá)了放置CompactRIO的位置。裂口使整個(gè)隔間都充滿40大氣壓的增壓汽油。雖然CompactRIO的數(shù)據(jù)采集卡被破環(huán)了,但是實(shí)時(shí)控制器在弄干并且清潔后仍然能夠運(yùn)行,使得我們搶救回了40小時(shí)任務(wù)的數(shù)據(jù)。這意味著,即使PIG幾乎完全被破環(huán),我們也能夠收回所有的檢測(cè)數(shù)據(jù),而無需進(jìn)行重復(fù)實(shí)驗(yàn)。
EngeMOVI和NI工程師已經(jīng)經(jīng)過了多次合作,實(shí)現(xiàn)了各種不同的項(xiàng)目:包括慣性PIGs、幾何和磁性PIGs、用于深水管道檢查的水下機(jī)器人、具有冗余運(yùn)動(dòng)功能的焊接機(jī)器人以及最近由NI 9505運(yùn)動(dòng)控制模塊驅(qū)動(dòng)的的機(jī)動(dòng)PIG,這些合作獲得了非常積極的結(jié)果。
我們開發(fā)的首個(gè)慣性PIG可以在直徑為25.3~35.6厘米、長(zhǎng)度為289.7英里的管道內(nèi)行進(jìn)。最大的可接受曲率是1.5D(D為管道直徑),在管道內(nèi)部行進(jìn)的最大速度是8米/秒。初始原型正在不斷被改進(jìn),并在其之上已經(jīng)研制出完整的系列產(chǎn)品,我們深信NI提供的產(chǎn)品將會(huì)不斷地在我們的新產(chǎn)品開發(fā)上扮演重要角色。