
引言
隨著我國(guó)在水情數(shù)據(jù)采集系統(tǒng)的信息化和現(xiàn)代化步伐的加快,需要采集的數(shù)據(jù)種類增多,采集的站點(diǎn)數(shù)增加,對(duì)數(shù)據(jù)采集的速度和質(zhì)量都提出了新的要求,傳統(tǒng)的水情數(shù)據(jù)測(cè)報(bào)系統(tǒng)的RTU(遠(yuǎn)端數(shù)據(jù)采集器)已不能適應(yīng)新的要求,亟需開發(fā)新的產(chǎn)品。
新開發(fā)的RTU,其處理能力要比較強(qiáng),可擴(kuò)展性要比較好,運(yùn)行的軟件系統(tǒng)具有可移植性,可以移植到不同的硬件平臺(tái),可以根據(jù)需要配置不同的傳感器。為此技術(shù)上選用成熟可靠的RTOS 和層次化、構(gòu)件化的設(shè)計(jì)思想構(gòu)建平臺(tái)軟件,保證軟件穩(wěn)定、可靠,擴(kuò)充新業(yè)務(wù)功能時(shí)軟件結(jié)構(gòu)體系保持不變。
RTU 對(duì)外有各種類型的傳感器接口及通信接口,平時(shí)處于守侯狀態(tài),當(dāng)有外部事件或定時(shí)處理事件時(shí),由中斷信號(hào)喚醒CPU 進(jìn)行相應(yīng)的處理,處理完及時(shí)返回低功耗守侯狀態(tài)。
功耗設(shè)計(jì)是一個(gè)很重要的問題。因?yàn)镽TU 是靠電池工作的,這就要求RTU 低功耗工作,考慮到RTU 大部分時(shí)間處于低功耗守候狀態(tài),守候時(shí)僅CPU 在工作,其它部分已關(guān)電,因此CPU 的功耗是設(shè)計(jì)的關(guān)鍵。
1 硬件設(shè)計(jì)
1.1 CPU 選型
早期的遠(yuǎn)端采集單元 RTU 一般選擇單片機(jī),最主要的原因是實(shí)現(xiàn)簡(jiǎn)單。但也帶來了一個(gè)問題,功能擴(kuò)充性特別差,稍作改變,軟硬件就要重新設(shè)計(jì)。另外由于處理能力不強(qiáng),功能的實(shí)現(xiàn)也受到限制。為此,我們選擇近期上市的嵌入式CPU。
我們選擇的原則是性價(jià)比好,功耗低。ARM7 系列處理器能較好滿足需要,目前生產(chǎn)廠商也較多,有ATEMEL 的AT91SAM7X256; 恩智浦NXP 的LPC2214 ;ST 微電子的ST710FZ2;TI 的MSP430 等,通過綜合比較我們認(rèn)為,ST 微電子的ST710FZ2 比較好,該CPU 為32 位ARM7 內(nèi)核的RISC 處理器,具有三級(jí)流水線指令結(jié)構(gòu),是一種高性能、低成本的方案。該CPU 具備多種省電模式,最小待機(jī)電流為30μA。
1.2 RTU 微控制核設(shè)計(jì)
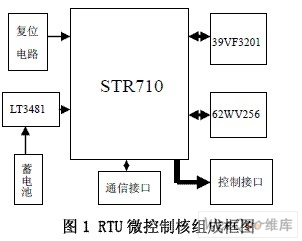
STR710FZ2T6 是一顆基于ARM7TDMI 內(nèi)核的32 位處理器,片上有豐富的資源:256+16K 片上 FLASH,64K 片內(nèi) RAM,4 路12 位AD,4 路硬件串行收發(fā)接口, 5 個(gè)16 位定時(shí)器,1 個(gè)硬件CAN 接口,1 個(gè)RTC 時(shí)鐘,1 個(gè)WDT 看門狗。片上和外部擴(kuò)展資源共同占據(jù)4GB 地址空間,可方便實(shí)現(xiàn)外部存儲(chǔ)器和其它資源的擴(kuò)充。
為了構(gòu)建一個(gè)通用的硬件平臺(tái),對(duì)FLASH 和RAM 作適當(dāng)擴(kuò)展,保證RTU 模塊將來的功能升級(jí)不受限制。FLASH 程序空間擴(kuò)展為4MB,RAM 擴(kuò)展為512KB。FLASH 選用SST 公司的SST39VF3201,容量為32Mb/16 位、低功耗模式典型3μA。RAM 選用ISSI 公司的IS61WV51216,容量為4Mb/16 位、低功耗待機(jī)工作9μW。由此構(gòu)成一個(gè)非常緊湊的微控制器核,如圖1 所示。整個(gè)處理機(jī)核的待機(jī)功耗小于50μA。
對(duì)于低功耗處理機(jī)核,還有一個(gè)重要的考慮是對(duì)外圍接口和接口設(shè)備的電源控制,在待機(jī)時(shí)切斷它們的供電,保證按需啟動(dòng)設(shè)備,為此設(shè)計(jì)擴(kuò)展了一些控制接口。
1.3 RTU 微控制核電源
微控制器核的電源設(shè)計(jì)也是關(guān)鍵的一步。RTU 模塊主控CPU 供電部分有其特殊的需求,分為工作模式和睡眠模式兩種,工作模式下的電流100mA 左右,而睡眠模式下的電流僅為50μA。兩種模式的差異導(dǎo)致了CPU 供電存在一定的難度。
一般開關(guān)電源甚至模塊電源都有較大的靜態(tài)功耗(40mA 左右),選用模塊電源對(duì)主控CPU 的供電相當(dāng)困難。負(fù)載在50μA~500mA 自身靜態(tài)功耗小于50μA 的開關(guān)電源目前很難找到。有少數(shù)專供超低功耗模式CPU供電的LDO電壓調(diào)整器可實(shí)現(xiàn),如SPX3819,其100μA負(fù)載電流時(shí)的靜態(tài)功耗為90μA。但效率太低,70-80%的電能被白白浪費(fèi)了,不適合蓄電池供電。基于以上原因,對(duì)CPU 的供電另選用一款降壓型的開關(guān)穩(wěn)壓器LT3481。它靜態(tài)功耗僅為50μA,而且低輸出時(shí)也有高的效率,50μA 時(shí)達(dá)60%,100mA 高達(dá)86%,特別適合微控制器核供電,如圖1 蓄電池直接連到LT3481,向CPU 提供電源。
2 操作系統(tǒng)的移植
很多領(lǐng)域中使用μC/OS-II,如照相機(jī)業(yè)、航空業(yè)以及工業(yè)機(jī)器人等。從8 位到64 位,μC/OS-II 已經(jīng)在40 多種不同架構(gòu)的微處理器上使用。μC/OS-II 的功能和函數(shù)經(jīng)過考驗(yàn)和測(cè)試,具有足夠的安全性與穩(wěn)定性。為此,操作系統(tǒng)選擇μC/OS-II。μC/OS-II 是一種開放源代碼的單用戶多任務(wù)、完全占先式的硬實(shí)時(shí)內(nèi)核,實(shí)時(shí)性好。μC/OS-Ⅱ本身只包含了任務(wù)調(diào)度、任務(wù)管理、時(shí)間管理、內(nèi)存管理和任務(wù)間的通信與同步等功能,沒有提供輸入輸出管理、文件系統(tǒng)、網(wǎng)絡(luò)之類的額外服務(wù)。但是由于μC/OS-Ⅱ的可移植性和開源性,用戶可以自己添加所需的各種服務(wù)。;一個(gè)基于μC/OS-II 的嵌入式應(yīng)用系統(tǒng)由四部分組成: 應(yīng)用程序代碼、配置程序、移植代碼、核心代碼。操作系統(tǒng)移植通過編寫移植代碼來完成。除了編寫OS_CPU.H、OS_CPU_A.S、OS_CPU_C.C 等幾個(gè)文件外,還要編寫初始化啟動(dòng)代碼。我們通過改寫周立功SmartARM2210 開發(fā)板的這部分代碼完成了移植,并能在自研的核心板上穩(wěn)定運(yùn)行。
3 軟件整體層次結(jié)構(gòu)
RTU 中的程序有應(yīng)用程序、μC/OS-II 操作系統(tǒng)、文件系統(tǒng)、硬件驅(qū)動(dòng)程序,整體層次關(guān)系如圖2。μC/OS-II 沒有提供硬件驅(qū)動(dòng)程序的內(nèi)核接口和用戶接口,為了讓程序移植性好,需要對(duì)設(shè)備驅(qū)動(dòng)程序按類型進(jìn)行統(tǒng)一的封裝,提供統(tǒng)一的編程接口,使應(yīng)用程序開發(fā)人員可以不考慮具體硬件的細(xì)節(jié)就可以編程。給上層應(yīng)用程序提供統(tǒng)一的系統(tǒng)設(shè)備調(diào)用接口,需要對(duì)設(shè)備的訪問操作進(jìn)行抽象,應(yīng)用程序通過硬件驅(qū)動(dòng)程序的上層訪問抽象接口來訪問底層硬件。驅(qū)動(dòng)程序的設(shè)計(jì)借鑒了Linux 系統(tǒng)的成功經(jīng)驗(yàn),同時(shí)考慮到嵌入式操作系統(tǒng)的特殊性,為μC/OS-II 建立了如圖2 中所示的驅(qū)動(dòng)框架模型。驅(qū)動(dòng)主要分兩個(gè)層次:驅(qū)動(dòng)程序的上層訪問抽象接口和硬件設(shè)備驅(qū)動(dòng)層。
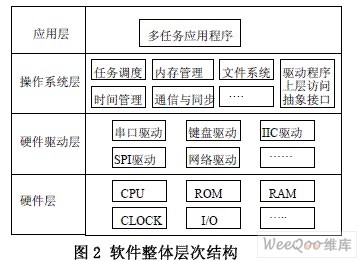
(1)上層訪問抽象接口層:這層包括抽象接口和設(shè)備管理核心數(shù)據(jù)兩部分。通過對(duì)設(shè)備訪問操作的抽象,為上層應(yīng)用提供了5 個(gè)訪問接口API 函數(shù): Open、Read、Write、Ioctrl、Close,用于打開、讀、寫、控制和關(guān)閉設(shè)備。設(shè)備管理核心數(shù)據(jù)結(jié)構(gòu)是驅(qū)動(dòng)框架的核心,為系統(tǒng)中的每個(gè)硬件設(shè)備分配唯一的設(shè)備名,上層應(yīng)用程序通過將設(shè)備名作為參數(shù)傳遞給API 函數(shù)實(shí)現(xiàn)對(duì)相應(yīng)設(shè)備的核心管理數(shù)據(jù)結(jié)構(gòu)的定位尋址,實(shí)現(xiàn)對(duì)設(shè)備的統(tǒng)一訪問控制。
(2)硬件設(shè)備驅(qū)動(dòng)模塊層:這層是硬件設(shè)備驅(qū)動(dòng)模塊功能的實(shí)現(xiàn)層,對(duì)各個(gè)硬件設(shè)備的驅(qū)動(dòng)在相應(yīng)的硬件設(shè)備驅(qū)動(dòng)模塊中完成。分別完成設(shè)備的打開、讀、寫、控制和關(guān)閉功能。
為了使程序具有良好的可讀性、可維性,采用了結(jié)構(gòu)化程序設(shè)計(jì)方法,即"自頂向下,逐步求精"的程序設(shè)計(jì)方法和"單入口單出口"的控制結(jié)構(gòu),從問題本身開始,經(jīng)過逐步細(xì)化,將解決問題的步驟分解為由基本程序結(jié)構(gòu)模塊組成的結(jié)構(gòu)化程序框圖,使每一個(gè)模塊的功能變單純而明確,為下一步軟件的功能擴(kuò)充和修改打下了良好的基礎(chǔ)。
4 功耗的管理設(shè)計(jì)
4.1 外設(shè)的功耗管理
功耗管理,除CPU 核的控制外,還要保證外設(shè)在需要使用時(shí)及時(shí)上電,使用完后立即關(guān)閉,從而達(dá)到降低功耗的目的。對(duì)外設(shè)的功耗管理通過IO 輸出口來控制MOS 管的通斷,從而打開或關(guān)斷外部設(shè)備的電源。
通信電臺(tái)的功耗最大,占系統(tǒng)耗電量的比例大,需要嚴(yán)格的計(jì)算控制。電臺(tái)設(shè)備從上電啟動(dòng)到關(guān)閉分三個(gè)階段:上電啟動(dòng)階段T1,數(shù)據(jù)發(fā)送階段T2,等待數(shù)據(jù)發(fā)送階段T3。
(1)設(shè)備上電的時(shí)機(jī): 信道編碼后,需要發(fā)送數(shù)據(jù)時(shí)打開。
(2)設(shè)備啟動(dòng)時(shí)間T1:設(shè)備從上電到可以發(fā)送數(shù)據(jù)需要一個(gè)過渡時(shí)間,具體的時(shí)間值與設(shè)備有關(guān),需要看具體設(shè)備的手冊(cè)。
(3)數(shù)據(jù)發(fā)送時(shí)間T2:這里的數(shù)據(jù)發(fā)送時(shí)間是指數(shù)據(jù)通過串口發(fā)送出去的時(shí)間,當(dāng)數(shù)據(jù)從串口發(fā)出后,程序會(huì)返回一個(gè)數(shù)據(jù)發(fā)送完畢的信息,T2 時(shí)間由接口設(shè)備自動(dòng)控制。
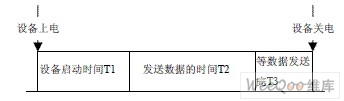
圖3 通信設(shè)備功耗控制示意圖
(4)等待數(shù)據(jù)發(fā)送結(jié)束時(shí)間T3:有些通信設(shè)備帶有數(shù)據(jù)緩沖區(qū),當(dāng)數(shù)據(jù)從串口發(fā)送給通信設(shè)備時(shí),不是立即就將數(shù)據(jù)發(fā)送出去,而是先暫存在數(shù)據(jù)緩沖區(qū),此時(shí)如果立即關(guān)閉設(shè)備電源,可能有數(shù)據(jù)沒有發(fā)送完,所以需要一個(gè)等待時(shí)間。
(5)設(shè)備關(guān)電時(shí)機(jī):當(dāng)T3 結(jié)束后,立即關(guān)閉設(shè)備的電源。
實(shí)際編程時(shí)T1 的值根據(jù)具體的設(shè)備的數(shù)據(jù)手冊(cè)來確定;T3 的值也需要根據(jù)具體的設(shè)備來調(diào)試,以接收端能準(zhǔn)確可靠的接收到數(shù)據(jù),T3 的值最小為準(zhǔn)。
4.2 CPU 核的功耗管理
CPU 核在沒有任務(wù)可做時(shí)要進(jìn)入低功耗狀態(tài)STOP 模式,在程序中通過空閑任務(wù)連續(xù)運(yùn)行狀態(tài)來判定。當(dāng)所有的任務(wù)都不運(yùn)行時(shí),操作系統(tǒng)會(huì)自動(dòng)運(yùn)行空閑任務(wù),當(dāng)空閑任務(wù)連續(xù)運(yùn)行超過一定的時(shí)間后(超過程序中需要的最大等待時(shí)間),關(guān)閉所有的外設(shè),讓CPU進(jìn)入STOP 模式。具體的實(shí)現(xiàn)是將原有的空閑任務(wù)程序進(jìn)行修改,增加一個(gè)記數(shù)器,當(dāng)記數(shù)到一定的數(shù)值(即一定的時(shí)間)后,進(jìn)入STOP 模式。
修改后的OS_TaskIdle 程序如下:
void OS_TaskIdle (void *pdata)
{
#if OS_CRITICAL_METHOD == 3 /* Allocate storage for CPU status register */
OS_CPU_SR cpu_sr;
#endif
pdata = pdata;
for (;;)
{
OS_ENTER_CRITICAL();
OSIdleCtr++;
OS_EXIT_CRITICAL();
Count = count +1;
If (count > 某個(gè)數(shù)值)
{ 將CPU 進(jìn)入STOP 模式;
}
OSTaskIdleHook();
}
}
由于空閑任務(wù)隨時(shí)可能被別的任務(wù)搶先,當(dāng)重新執(zhí)行空閑任務(wù)時(shí),如接著搶先點(diǎn)繼續(xù)執(zhí)行,全局變量COUNT 沒有被清零,所以在每個(gè)任務(wù)開始運(yùn)行或執(zhí)行結(jié)束后,都需要對(duì)COUNT 清零,這樣可以保證COUNT 重新記數(shù),在FOR 循環(huán)語句中,當(dāng)COUNT 記數(shù)到一定值,CPU 將進(jìn)入STOP 模式。
5 結(jié)束語
本RTU 微控制器經(jīng)過試運(yùn)行后,功耗滿足要求,靜態(tài)功耗小于500μA/12V,在采用10AH 的蓄電池加太陽能板(容量靈活組合),可以保證系統(tǒng)無日照50 天正常工作。由于采用了μCOS-II 操作系統(tǒng),并編寫了硬件驅(qū)動(dòng)程序的內(nèi)核接口和用戶接口,使程序具有良好的移植性,也方便了應(yīng)用程序開發(fā)人員編寫程序。
本文作者創(chuàng)新點(diǎn):提出了一種基于ARM7 和μCOSII 的RTU 低功耗設(shè)計(jì)方案。采用ARM7 處理機(jī),又根據(jù)RTU 設(shè)備工作特點(diǎn)設(shè)計(jì)了電源功耗管理軟件,實(shí)現(xiàn)了RTU 高的處理能力、低的功耗及長(zhǎng)時(shí)間的電池供電。
該設(shè)計(jì)可大規(guī)模應(yīng)用在全國(guó)水情測(cè)報(bào)系統(tǒng)中,將會(huì)有500 萬以上的經(jīng)濟(jì)效益。