眾所周知,三相異步電動(dòng)機(jī)以其低成本、高可靠性和易維護(hù)等特點(diǎn),被廣泛應(yīng)用在各個(gè)行業(yè)。特別是機(jī)床設(shè)備中,它作為一種主要的動(dòng)力設(shè)備,常常用來(lái)拖動(dòng)主軸、工作臺(tái)、冷卻泵、油泵等裝置。但是它在直接啟動(dòng)時(shí),由于啟動(dòng)電流高達(dá)額定電流的5~7倍,所以會(huì)對(duì)電網(wǎng)及負(fù)載造成很大的沖擊,影響了周邊電器的工作,增加了機(jī)械傳動(dòng)部件的磨損,降低了設(shè)備的壽命。這里所介紹的基于單片機(jī)AT89C5l的三相異步電動(dòng)機(jī)軟啟動(dòng)器不但可以解決上述問(wèn)題,從本質(zhì)上改善交流電動(dòng)機(jī)的啟動(dòng)特性,而且具有節(jié)電運(yùn)行、過(guò)流保護(hù)、過(guò)載保護(hù)、缺相保護(hù)等功能。
1 工作原理及硬件構(gòu)成
該軟啟動(dòng)器的硬件電路結(jié)構(gòu)框圖如圖1。
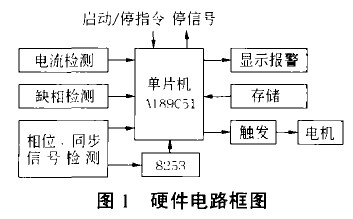
啟動(dòng)時(shí)(接到啟動(dòng)指令),從單片機(jī)輸出口產(chǎn)生移相觸發(fā)脈沖,通過(guò)控制串接在三相異步電動(dòng)機(jī)繞組中的雙向晶閘管的導(dǎo)通角α,使之實(shí)現(xiàn)斜坡方式減壓?jiǎn)?dòng)。在電機(jī)運(yùn)行中,實(shí)時(shí)檢測(cè)電機(jī)功率因數(shù),據(jù)此改變導(dǎo)通角α,實(shí)現(xiàn)節(jié)電運(yùn)行。過(guò)流與過(guò)載檢測(cè)采用常規(guī)電流互感器電路,經(jīng)整流、濾波、放大、A/D轉(zhuǎn)換及隔離后送人單片機(jī),由軟件完成數(shù)據(jù)處理及判斷。缺相檢測(cè)采用同時(shí)檢測(cè)三相電源的方法以判斷缺相故障。每相檢測(cè)電路如圖2所示。在晶閘管導(dǎo)通期間,該電路Vo應(yīng)輸出高電平信號(hào),否則該相缺相(電流為零)。各相的檢測(cè)信號(hào)也送入單片機(jī)進(jìn)行處理及判斷。

相位檢測(cè)與同步信號(hào)產(chǎn)生電路見(jiàn)圖3。A相電流、電壓信號(hào)經(jīng)光耦變?yōu)榉讲ê笏腿氘惢蜷T,定時(shí)/計(jì)數(shù)器8253的通道0(工作于方式2)用于檢測(cè)A相電壓與電流的相位差,電壓過(guò)零時(shí)門控端GATE0得到高電平,開(kāi)始計(jì)數(shù),電流過(guò)零時(shí)GATEo變?yōu)榈碗娖剑?jì)數(shù)停止。單片機(jī)在GATE。低電平期間讀出計(jì)數(shù)值則可得到電壓電流相位差。由8253的通道l、2(工作于方式5)延時(shí)實(shí)現(xiàn)觸發(fā)脈沖的移相控制,A相電壓過(guò)零為同步信號(hào)啟動(dòng)定時(shí)。通道l與單片機(jī)的定時(shí)/計(jì)數(shù)器T0配合控制l、2、3號(hào)晶閘管的導(dǎo)通時(shí)刻,通道2與單片機(jī)的定時(shí)/計(jì)數(shù)器T,配合控制4、5、6號(hào)晶閘管的導(dǎo)通時(shí)刻,T0、T1定時(shí)時(shí)間均為3.3ms,它是利用前一次定時(shí)中斷啟動(dòng)下一次定時(shí),而在一周期內(nèi)分別產(chǎn)生相差3.3ms的三個(gè)觸發(fā)控制脈沖。

啟動(dòng)(停)指令來(lái)自機(jī)床電氣控制系統(tǒng)主控制器,按照加工工藝流程,要求該電動(dòng)機(jī)啟動(dòng)(停)時(shí),主控制器會(huì)發(fā)出啟動(dòng)(停)指令,則軟啟動(dòng)器控制電機(jī)啟動(dòng)(停)。在機(jī)床設(shè)備中往往需要聯(lián)鎖控制,這樣當(dāng)電動(dòng)機(jī)出現(xiàn)故障而停機(jī)保護(hù)時(shí),就需向主控制器回饋一個(gè)停信號(hào),主控制器隨之可以進(jìn)行聯(lián)鎖控制處理
2 控制軟件
該軟件的任務(wù)是控制硬件系統(tǒng)自動(dòng)采集、檢測(cè)輸人信號(hào),對(duì)輸人數(shù)據(jù)進(jìn)行判斷與處理,按要求輸出所需的控制信號(hào)。主程序流程圖如圖4所示。接到啟動(dòng)指令后首先啟動(dòng)電機(jī),之后進(jìn)人循環(huán)工作過(guò)程直至接到停指令或故障停機(jī)。由于有較強(qiáng)功能

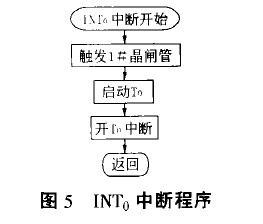
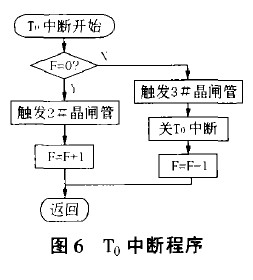
的硬件電路的配合,使得主程序在每次循環(huán)中都能進(jìn)行故障檢測(cè)、電流值采樣顯示、功率因數(shù)角測(cè)量、觸發(fā)脈沖移相和輸出控制,因此做到了控制迅速,采樣、故障診斷兩不誤。INTo與To中斷程序?qū)崿F(xiàn)的是1、2、3號(hào)晶閘管的觸發(fā)脈沖移相與定位控制,其流程圖見(jiàn)圖5、圖6。INT1與T1中斷程序?qū)崿F(xiàn)的是4、5、6號(hào)晶閘管的觸發(fā)脈沖移相與定位控制,其流程圖與圖5、圖6相似。
3 結(jié)束語(yǔ)
采用單片機(jī)控制的三相異步電動(dòng)機(jī)軟啟動(dòng)器具有功能完善、運(yùn)行可靠、使用方便、成本低廉等特點(diǎn),滿足了企業(yè)對(duì)設(shè)備的可靠性、生產(chǎn)效率和資源優(yōu)化等方面的要求,具有一定的應(yīng)用價(jià)值。
參考文獻(xiàn):
[1] 李仁定.電機(jī)的微機(jī)控制[M].北京:機(jī)械工業(yè)出版社,l999
[2] 余永全.ATMEL89系列單片機(jī)原理及應(yīng)用[M].北京:電子工業(yè)出版社,2000.
