
0 引言
近年來,隨著經(jīng)濟(jì)的不斷增長,城市化、汽車化的急速發(fā)展,城市道路增長的有限與車輛增加的無限造成了嚴(yán)重的交通擁擠問題,其中以交叉口的交通擁堵問題最為嚴(yán)重。據(jù)數(shù)據(jù)顯示,每年因交通堵塞造成的經(jīng)濟(jì)損失高達(dá)幾十億美元,現(xiàn)已成為制約經(jīng)濟(jì)發(fā)展和城市建設(shè)的瓶頸。可見,交通擁堵現(xiàn)狀亟待解決。而有效地利用當(dāng)前交通信號控制系統(tǒng)的作用,尋找一種更適用于實(shí)際情況的交通信號控制方案又是解決該問題的主要途徑。因此,本文的研究就顯得意義重大。 當(dāng)前存在的交通信號控制方案主要有定時控制、感應(yīng)控制、基于數(shù)學(xué)模型的自適應(yīng)控制和模糊控制等。其中當(dāng)前存在的兩級模糊控制方案是目前控制效果相對較優(yōu)的一種,可以較好地實(shí)現(xiàn)對交叉口交通信號燈的實(shí)時控制。但它仍存在許多問題,其中一個最大的不足在于它不能準(zhǔn)確地顯示出紅、綠燈相位的時間,沒能與能降低闖紅燈率和交通事故率,且具有人性化特征的信號系統(tǒng)顯時裝置結(jié)合運(yùn)用,這也是其不易運(yùn)用到實(shí)際情況的癥結(jié)所在;另外,有些兩級模糊控制在第一級控制模塊中,其采取的輸入變量只考慮了相位排隊(duì)長度和車流到達(dá)率,而沒有考慮各相位車輛等待時間。此時若一個相位的車輛一段時間內(nèi)一直都很少,那照該控制方案就只能讓其一直等待,這必將造成其控制的不合理。
基于此,本文針對當(dāng)前控制效果相對較好的模糊控制的不足之處,同時結(jié)合對當(dāng)前各種常用交叉口交通信號控制方案的全面對比與深入分析,沿用了各種控制方案的優(yōu)點(diǎn),完善和彌補(bǔ)其不足之處,最終設(shè)計(jì)出了一種更適用于實(shí)際情況的新型兩級模糊控制方案。該新方案對隨機(jī)交通流的適應(yīng)性強(qiáng),彌補(bǔ)了定時控制的缺點(diǎn);同時,綜合考慮了綠燈相位和紅燈相位,且對相位繁忙優(yōu)先性進(jìn)行了考慮,彌補(bǔ)了感應(yīng)控制的缺陷;另外,對模糊器進(jìn)行了優(yōu)化,同時與當(dāng)前運(yùn)用成熟的定時控制的信號系統(tǒng)顯時裝置進(jìn)行了有機(jī)結(jié)合,充分發(fā)揮了信號系統(tǒng)顯時裝置的優(yōu)點(diǎn),利用了可視化的時間來降低闖紅燈率和交通事故率,使其更具人性化,對交通現(xiàn)場的適用性更強(qiáng)。
1 交叉口交通平面幾何設(shè)計(jì)設(shè)計(jì)與相位設(shè)計(jì)
通過對當(dāng)前城市交叉口交通平面幾何設(shè)計(jì)和相位設(shè)計(jì)的具體情況進(jìn)行深入調(diào)研并參考了大量文獻(xiàn)后,確定出當(dāng)前相對最優(yōu)的一種交叉口交通平面幾何設(shè)計(jì)方案如圖1所示。交叉路口分東、南、西、北四個通行方向,每個通行方向均有左轉(zhuǎn)、直行和右轉(zhuǎn)三股車流。

針對當(dāng)前存在的各種相位設(shè)計(jì)方案,從其交叉口利用率、安全性、人性化和實(shí)用性等方面綜合分析對比后,確定出當(dāng)前相對最優(yōu)的相位設(shè)計(jì)方案如圖2所示,即南北直行、南北左右轉(zhuǎn)、東西直行和東西左右轉(zhuǎn),行人和非機(jī)動車可以在第1相位和第3相位開通時順利通行。本文將以此為研究對象。

2 交通信號新型兩級模糊控制思想
新型兩級模糊控制方案的整體控制圖如圖3所示,先通過車輛檢測器檢測出當(dāng)前所有處于紅燈相位的等待車輛數(shù)和各車流方向自上次綠燈以來的紅燈持續(xù)時間,然后將檢測出來的交通流數(shù)據(jù)傳送到新型兩級模糊控制器。
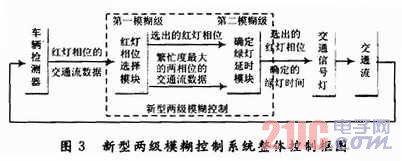
第一模糊控制級接收到車輛檢測器檢測出的紅燈相位等待車輛數(shù)和紅燈持續(xù)時間后,經(jīng)過該模糊控制級處理推出當(dāng)前各紅燈相位的繁忙度,從而可以確定出在當(dāng)前綠燈相位跳轉(zhuǎn)前一瞬間下一個該亮綠燈的等待相位。同時,找出繁忙度最大的2個相位,并返回去得到這繁忙度最大的2個相位的交通流數(shù)據(jù)(即這兩相位的相位等待車輛數(shù))。
第二模糊控制級通過對繁忙度最大的兩個相位的交通流數(shù)據(jù)處理后,推出下一個綠燈等待相位的綠燈時間,并將該綠燈時間傳到交通顯時信號燈上。當(dāng)?shù)鹊缴弦痪G燈相位亮完綠燈后立即讓第一級模糊控制選出的綠燈等待相位顯示綠燈,同時使其顯示綠燈時間,其顯示時間即為第二級模糊控制確定出的綠燈時間。這樣周而復(fù)始的運(yùn)行,即可很好地對交通流進(jìn)行實(shí)時智能控制了。
另外,還充分考慮到在實(shí)際交通信號控制中,控制方案應(yīng)人性化且適用性強(qiáng)。對此,對其紅綠燈顯時控制系統(tǒng)做了如下規(guī)定:顯示綠燈的相位顯示準(zhǔn)確的綠燈運(yùn)行時間;對于紅燈相位,只對下一個綠燈相位就是它的紅燈相位顯示時間,且只在當(dāng)前綠燈相位綠燈時間即將結(jié)束前瞬間(假定5 s),使其顯示準(zhǔn)確的紅燈倒計(jì)時間。顯示了紅燈時間的相位即表示下一相位該它通行,而其他不顯時間的紅燈相位,表示需要多等待,下一相位不是它。這樣充分發(fā)揮了現(xiàn)有顯時交通信號裝置的優(yōu)勢,更易遵守,更具人性化,更適用于實(shí)際交通情況。
3 新型兩級模糊器的設(shè)計(jì)
3.1 第一級模糊控制器的設(shè)計(jì)
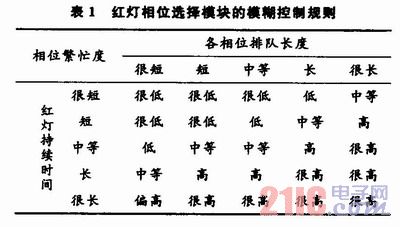
該模糊級為紅燈相位選擇模塊,該模塊為雙輸入單輸出模糊控制,其兩個輸入為:當(dāng)前處于紅燈相位的等待(排隊(duì))車輛數(shù)(qr)和各車流方向自上次綠燈以來的紅燈持續(xù)時間(tr),輸出為各紅燈相位的繁忙度(Ur)。
qr的基本論域?yàn)閇0,30],離散論域?yàn)閧1,2,3,4,5,6,7,8,9,10,11,12,13,14},在離散論域上定義5個模糊子集{很短、短、中等、長、很長};
tr的基本論域?yàn)閇0,120],離散論域?yàn)閧1,2,3,4,5,6,7,8,9,10,11,12},在離散論域上定義5個模糊子集{很短、短、中等、長、很長};Ur的基本論域?yàn)閇0,6],離散論域?yàn)閧1,2,3,4,5,6},在離散論域上定義5個模糊子集{很低、低、中等、高、很高}。
qr,tr,Ur模糊子集的隸屬度函數(shù)如圖4所示,模糊控制規(guī)則如表1所示。

3.2 第二級模糊控制器的設(shè)計(jì)
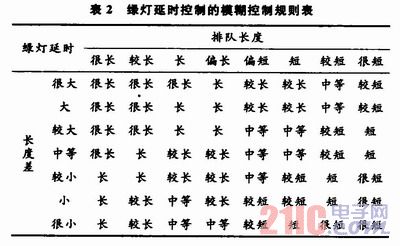
該模糊級為確定綠燈延時模塊,該模塊為雙輸入單輸出模糊控制,其中兩個輸入為:當(dāng)前繁忙度最大相位的排隊(duì)長度(dc)和該相位與繁忙度第二大相位的排隊(duì)長度的差值(長度差xc),輸出為該相位的綠燈延時(tL)。
假定每個相位的最小綠燈時間Gmin=10 s,則相位綠燈總時間Gtime=Gmin+tL。
dc的基本論域?yàn)閇0,30],離散論域?yàn)閧1,2,3,4,5,6,7,8,9,10,11,12,13,14},在離散論域上定義8個模糊子集{很長、較長、長、偏長、偏短、短、較短、很短);xc的基本論域?yàn)閇0,30],離散論域?yàn)閧O,1,2,3,4,5,6,7,8,9,10,11,12},在離散論域上定義7個模糊子集{很大、大、較大、中等、較小、小、很小};tL的基本論域?yàn)閇0,50],離散論域?yàn)閧1,2,3,4,5,6,7,8,9,10,11,12,13},在離散論域上定義7個模糊子集很{很長、長、較長、中等、較短、短、很短}。
dc,xc,tL模糊子集的隸屬度函數(shù)如圖5所示,模糊控制規(guī)則表見表2。

4 仿真研究
為了驗(yàn)證新型兩級模糊控制器的控制效果,用Matlab結(jié)合VB編寫了新型兩級模糊控制的仿真程序,并與當(dāng)前廣泛運(yùn)用的感應(yīng)控制和定時控制進(jìn)行了比較。假定路口各方向車輛到達(dá)交叉口是隨機(jī)的且服從均勻分布,利用VB中的隨機(jī)函數(shù)產(chǎn)生12個方向車流每秒鐘到達(dá)的車輛數(shù),到達(dá)率為0~0.4輛/s,設(shè)某車流紅燈轉(zhuǎn)變?yōu)榫G燈后車輛以1輛/s的速率離開等候的車隊(duì),以通過交叉口的平均車輛延誤作為評價指標(biāo)。分別對新型模糊控制、感應(yīng)控制和定時控制在不同的交通條件下各進(jìn)行10次仿真比較,每次仿真時間均為1 200 s,10次仿真的平均結(jié)果如表3所示。

從仿真結(jié)果表3中可知,采用新型兩級模糊控制方法從整體控制效果上看,在平均車輛延誤上比感應(yīng)控制方法提高了13.290 8%,比定時控制方法提高了22.820 1%,可見優(yōu)勢明顯。
5 動態(tài)模擬演示
為了使其更具可觀性與實(shí)用性,更易于運(yùn)用到交通現(xiàn)場,我們還對新型兩級模糊控制進(jìn)行了動態(tài)模擬演示。其動態(tài)模擬演示圖如圖6所示。
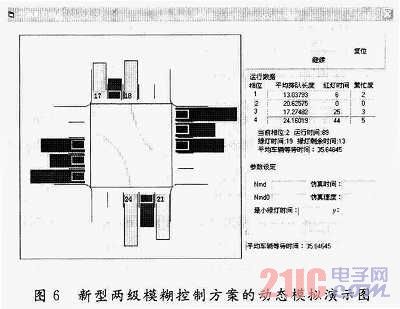
可以對交通參數(shù)進(jìn)行隨意設(shè)定從而實(shí)現(xiàn)不同情況下的動態(tài)模擬,在演示圖中可以通過繁忙度知道下一綠燈相位應(yīng)為何相位,通過當(dāng)前相位可以知道正處于綠燈的相位,且由綠燈時間可知整個相位的總綠燈時間,由綠燈剩余時間可以準(zhǔn)確的知道其剩余綠燈時間。這樣就使新方案更具可觀性與實(shí)用性。對于實(shí)際交通流時,只需把檢測到的實(shí)時數(shù)據(jù)輸入,通過新型兩級模糊控制器就可以實(shí)現(xiàn)實(shí)時在線控制了。
6 結(jié)語
本文確定當(dāng)前相對最優(yōu)的交叉口平面幾何設(shè)計(jì)與相位設(shè)計(jì),并設(shè)計(jì)出一種更適用于實(shí)際情況的新型兩級模糊控制方案。另外,利用Mat-lab軟件和VB編程軟件對新方案進(jìn)行了仿真比較,驗(yàn)證了新方案的有效性和優(yōu)越性,同時還對其進(jìn)行了動態(tài)模擬演示,使其更具可觀性與真實(shí)性,更易于運(yùn)用到交通現(xiàn)場。該新方案實(shí)用性強(qiáng)、易于推廣、利于環(huán)保。只需在現(xiàn)有的交通控制系統(tǒng)中把新型控制程序輸入其交通控制的微型計(jì)算機(jī)中,即可實(shí)現(xiàn)其實(shí)時在線控制,充分發(fā)揮了計(jì)算機(jī)的高速處理與計(jì)算能力。也大大降低了交通信號設(shè)備的改造費(fèi)用,具有可觀的經(jīng)濟(jì)效益。同時,交通流的通暢、車輛排隊(duì)時間的縮短能有效地減少汽車尾氣的排放量,更能適應(yīng)當(dāng)前全球的低碳經(jīng)濟(jì)計(jì)劃。