
引言
隨著人們生活水平的提高,對汽車舒適性的要求也越來越高。汽車空調(diào)的質(zhì)量影響到對整車的評價。由于汽車是直接暴露在太陽或風雪下,而且汽車行駛的速度變化無常,車內(nèi)的空間有限。這都加大了汽車空調(diào)的設(shè)計難度。一般來說汽車空調(diào)由壓縮機,冷凝器,蒸發(fā)器,和膨脹閥組成。汽車空調(diào)壓縮機是汽車空調(diào)的關(guān)鍵零部件,也是主要的運動部件。采用虛擬樣機技術(shù)可以研究汽車空調(diào)壓縮機的運動規(guī)律和動力性能,為設(shè)計和優(yōu)化提供幫助。
虛擬樣機技術(shù)是在產(chǎn)品的設(shè)計開發(fā)中,將分散的零部件設(shè)計和分析技術(shù)融合在一起,在計算機上建造出產(chǎn)品的整體模型,并對該產(chǎn)品在投入使用后的各種工況進行仿真分析,預測產(chǎn)品的整體性能,進而改進設(shè)計,提高產(chǎn)品質(zhì)量。
本文是采用MSC.ADAMS 軟件對一款汽車空調(diào)壓縮機進行運動,動力分析,從而了解其運動規(guī)律,并計算一些聯(lián)接副的受力情況。
1 汽車空調(diào)壓縮機運動機構(gòu)概述
汽車空調(diào)壓縮機可分為往復式和旋轉(zhuǎn)式二大類。往復式的又分曲軸連桿式,軸向活塞式,和徑向活塞式。其中軸向活塞式又分旋轉(zhuǎn)斜盤式和搖擺斜盤式。旋轉(zhuǎn)式又分刮片式,滾動活塞式,三角轉(zhuǎn)子式,渦旋式,螺桿式。本文主要研究5 缸搖擺斜盤式的汽車空調(diào)壓縮機。
搖擺斜盤式的汽車空調(diào)壓縮機的工作原理是通過主軸的旋轉(zhuǎn)帶動斜盤的轉(zhuǎn)動,通過只能進行擺動的行星盤將旋轉(zhuǎn)運動轉(zhuǎn)化為活塞的往復運動,活塞在氣缸里對制冷劑進行壓縮。(見圖1)
圖1 空調(diào)壓縮機核心部件裝配圖
2 搖擺斜盤式壓縮機運動學幾何關(guān)系
搖擺斜盤式壓縮機通過主軸帶動斜盤作圓周運動,行星盤由于導向桿的運動約束,將主軸的周轉(zhuǎn)運動轉(zhuǎn)化為斜盤表面質(zhì)點的軸向往復,并通過連桿帶動活塞,構(gòu)成空間上類曲柄滑塊機構(gòu)。
本模型中,由于受到行星盤上導向桿的約束,活塞3 的連桿連接行星盤一端的球心始終位于軸線與導向桿軸線所確定的平面內(nèi),該活塞的運動處于較為特殊的地位,幾何關(guān)系為平面運動。其余活塞1,5,活塞2,4 互為對等關(guān)系,且均屬空間運動學范疇。
3 活塞運動學公式推導
在研究壓縮機時,活塞的運動規(guī)律十分重要。下面以活塞3 為例,對壓縮機的活塞質(zhì)心運動進行公式推導。
如圖2 所示,對該幾何關(guān)系構(gòu)建封閉矢量多邊形,l1、l2、l3、s4 均為相應的桿矢量,θ1、θ2、θ3、θ4 為桿件的方位角,各桿件矢量方向不影響計算結(jié)果,但方位角均應由x 軸開始,并以沿逆時針方向計量為正。
圖2 活塞3 運動幾何關(guān)系
由于主軸軸線(即斜盤軸線)和行星盤軸線各自在工作結(jié)合面(粗虛線)上的交點有一偏心距,其偏置的結(jié)果正好使得行星盤中心球狀腔的球心(O 點)落在了主軸軸線(X 軸)上。
所以,在固定球輪的頂壓下,行星盤完全繞O 點作擺動,行星盤中心孔腔的球心(O 點)到圓周孔腔(即連桿球鉸鏈落位處)的球心(A 點)之間的距離為曲柄長度,連桿兩球心之間距離為連桿長度,活塞質(zhì)心運動狀態(tài)等效B 點(球鉸鏈球心)運動狀態(tài)。
由于在封閉矢量多邊形中,各矢量之和為零:

4 通過MSC.ADAMS 對壓縮機進行運動動力分析
4.1 分析的基本步驟
汽車空調(diào)壓縮機的仿真過程如下:1. 運用UG 的三維實體建模模塊對壓縮機核心運動機構(gòu)進行三維建模,主要包括主軸、斜盤、行星盤、連桿和活塞五大部件,并在UG 環(huán)境下進行裝配。2. 將建好的實體模型以Parasolid 格式輸出,導入ADAMS 中,添加材料屬性,并根據(jù)默認位置關(guān)系附加運動約束,實現(xiàn)模擬運動無干涉。3. 根據(jù)三種給定的不同工況,計算活塞端面的氣體壓力,將氣體力學方程導入,完成力學約束的添加。4. 根據(jù)工況,在驅(qū)動軸上賦給指定轉(zhuǎn)速,輸出動力學特性曲線,包括活塞質(zhì)心位移曲線、活塞質(zhì)心速度曲線、活塞質(zhì)心加速度曲線和活塞端面力曲線。并對獲取的數(shù)據(jù)進行動力學分析。
4.2 零部件的物理參數(shù)
其幾何參數(shù)和慣性參數(shù)采用三維CAD 實體建模軟件UG-Ⅱ計算得到,如表1 所示。這對幾何形狀極不規(guī)則,采用計算方法很難得到準確數(shù)值的物體,如斜盤等,將大大簡化計算過程。
表1 空調(diào)壓縮核心部件力學參數(shù)

4.3 約束的選定
在ADAMS 的VIEW 模塊對模型中的零件之間的運動副進行約束定義。下表為運動副的約束定義。
表2 空調(diào)壓縮核心部件運動約束

4.4 確定邊界條件(活塞壓力的確定)
4.4.1 仿真工況:
按試驗要求,如表4.2.3-1 所示,仿真過程將在900rps、5500rps、7000rps 三種轉(zhuǎn)速及各自相對應的吸氣壓強、排氣壓強下進行測試。
表3 空調(diào)壓縮機試驗工況

4.4.2 活塞頂部壓力公式推導:
根據(jù)氣體方程:多變過程的 P*VN=C 得出:
壓縮過程:P1=Ps*((L+C)/( .5H11G.cm_dis+d3+C)) N
排氣過程:P2=Pd
膨脹過程:P3=Pd*(C/(.5H11G.cm_dis+d3+C)) N
吸氣過程:P4=Ps
其中:
L=壓縮機平均行程
C=余隙
N=多變指數(shù)
d3=活塞下止點平均位置
.5H11G.cm_dis=活塞質(zhì)心點位置4.4.3 多變指數(shù)的確定
實際熱機中,有些過程工質(zhì)的狀態(tài)參數(shù)p、v、T 等都有顯著的變化,與外界之間換熱量也不可忽略不計,這時它們不能簡化為四種基本的熱力學過程(定容、定壓、定溫和絕熱)。試驗測定了一些過程中1kg 工質(zhì)的壓力p 和v 的關(guān)系,發(fā)現(xiàn)它們接近指數(shù)函數(shù),用數(shù)學表達式描述即:p*vn=定值。該式即多變過程的過程方程式。n 為多變指數(shù),它可以是負無窮到正無窮之間的任意數(shù)值。多變過程比前述幾種特殊過程更為一般化,但也并非任意的過程,它仍根據(jù)一定的規(guī)律變化:整個過程服從過程方程p*vN=定值,n 為某一定值。
實際過程往往更為復雜。譬如柴油機氣缸中的壓縮過程,開始時工質(zhì)溫度低于缸壁溫度,邊吸熱邊壓縮而溫度升高,高于缸壁溫度后則邊壓縮邊放熱,整個過程n 大約從1.6 變化到1.2 左右;至于膨脹過程,由于存在后燃及高溫時被離解氣體的復合放熱現(xiàn)象,情況更為復雜,其散熱規(guī)律的研究已不屬于熱力學的范圍。對于多變指數(shù)n 式變化的實際過程,若n 的變化范圍不大,則可用一個不變的平均值近似地代替實際變化地n;若n 地變化較大,則可將實際過程分成數(shù)段,每一段都近似為n 值不變。
本課題中,由于n 值的變化范圍不大,根據(jù)以往實際工況和以往經(jīng)驗,選取n=1.3。
如圖3 所示,壓縮和膨脹為多變過程,多變指數(shù)n=1.3。膨脹結(jié)束點A 的壓力應小于吸氣壓力Ps,壓縮結(jié)束點B 的壓力應大于排氣壓力Pd,但考慮影響有限,故膨脹結(jié)束點A 的壓力=Ps,壓縮結(jié)束點B 的壓力=Pd。

圖 3 壓縮機整個行程中的P-V 關(guān)系
4.4.4 活塞頂部壓力在運動分析中的體現(xiàn):
4.4.4.1 MSC.ADAMS 中IF 函數(shù)的定義
IF(expr1:expr2,expr3,expr4)
式中,expr1 為控制變量,expr2,expr3 和expr4 均為表達式。
函數(shù)F=IF(expr1:expr2,expr3,expr4)的含義為:
4.4.4.2 在本課題中IF 語句算法
圖4 所示為本課題中壓縮機活塞端面受力IF 語句算法。先由活塞的速度方向(大于零/小于零),判斷活塞運動處于吸氣/膨脹狀態(tài),還是壓縮/排氣狀態(tài),再根據(jù)活塞質(zhì)心位置與膨脹結(jié)束點的關(guān)系確定是吸氣狀態(tài)還是膨脹狀態(tài);根據(jù)活塞質(zhì)心位置與壓縮結(jié)束點關(guān)系確定是壓縮狀態(tài)還是排氣狀態(tài)。
圖4 活塞端面受力IF 語句算法
程序框圖如圖5 所示:
圖5 活塞端面受力IF 語句程序框圖
4.4.4.3 If 語句公式
將在UG 中建好的模型導入ADAMS 后,根據(jù)實際情況施加所需的運動約束。設(shè)定End Time = 10,step = 100,進行初步動態(tài)運行,測量所得數(shù)據(jù)。根據(jù)上述數(shù)據(jù)經(jīng)過計算,得出在三種不同工況下,活塞的排氣點d1,吸氣點d2 的位置,如表5 所示。
表5 壓縮機活塞行程參數(shù)(2)

以活塞3 在工況900rps 下端面受力為例:吸氣壓力Ps=0.358MPa, 排氣壓力Pd=2.97MPa, 排氣起始點位置d1=-80.9924, 吸氣起始點位置d2=-83.9607,活塞平均下止點位置d3=-85.1881, 活塞表面積S=897.2703, 活塞平均行程L=22.5889,余隙C=0.3,多變系數(shù)n=1.3。
900r/min:
Piston_3 氣體方程:
IF( VZ(piston3.cm):
IF(.5H11G.cm_dis3+80.9924:897.2703*2.97,897.2703*2.97,897.2703*0.358*((22.5889+0.3)/( .5H11G.cm_dis3+85.1881+0.3))**1.3),
IF(.5H11G.cm_dis3+80.9924:897.2703* 0.358, 897.2703*2.97, 897.2703 *2.97),
IF(.5H11G.cm_dis3+83.9607:897.2703*2.97*(0.3/(.5H11G.cm_dis3+85.1881+0.3))**1.3, 897.2703*0.358, 897.2703*0.358)
)
在模型上施加運動學約束以及力約束后,進行900rps 的運動仿真,以活塞3 為例,摘取其位移、速度、加速度與受力的曲線圖,根據(jù)先前算出的d1、d2 位置,判定活塞在整個行程中的四個階段的狀態(tài)。一個周期內(nèi)壓縮機進行膨脹——吸氣——壓縮——排氣為一次完整循環(huán)。狀態(tài)判定結(jié)果如圖6 所示。

圖6 位移、速度、加速度與受力的曲線圖5 分析結(jié)果
5.1 運動學分析
在轉(zhuǎn)速為900rpm、吸氣壓強為0.358Mpa、排氣壓強為2.97Mpa 的工況下,如圖7 和圖8 所示,由于正五邊形的對稱性,所有活塞的位移幅值和端面受力曲線基本一致,相位差為2π /5。
圖7 活塞位移曲線(900rpm)
圖8 活塞壓力曲線(900rpm)
在活塞端面受力曲線中可以很明顯的看到兩段壓力恒定的直線,對應了壓縮機工作中的吸氣和排氣狀態(tài)(上端為吸氣,下端為排氣),兩段曲線則分別對應了膨脹和壓縮狀態(tài)(左端為壓縮,右端為膨脹),和上文利用速度方向和活塞質(zhì)心位置判定結(jié)果一致。
由于導向桿的約束所帶來的對稱性,使得靠近導向桿軸線的活塞(1 和5),其速度幅值要略大于遠離軸線的活塞(2 和4)速度幅值,如圖9 所示。導向桿所帶來的對稱性在加速度曲線圖中尤為明顯,如圖10 所示,且處于對稱軸線上的活塞3 的加速度曲線變化平穩(wěn)而光滑,遠離軸線的活塞(1 和5)的加速度曲線則出現(xiàn)了一定的畸變,加速度的峰值相對原相位出現(xiàn)了超前或滯后的現(xiàn)象。
圖9 活塞速度曲線(900rpm)
圖10 活塞加速度曲線(900rpm)
出現(xiàn)這種情況在很大程度上是由于導向桿的運動約束造成的“軸對稱性”而非理想狀態(tài)下的空間對稱性,五個活塞在機構(gòu)上并不處于完全對等的地位所致。在滿足了五個活塞在周向位移的要求的同時,因為連桿與行星盤的球鉸鏈球心有不同程度的空間運動,使得速度和加速度的傳遞出現(xiàn)了不同的結(jié)果。
5.2 動力學分析
通過分析可得導向桿頭部的受力情況(圖11)和壓縮機的功耗(圖12)。通過導向桿的受力曲線我們可將其作為有限元分析的邊界條件,分析其應力,應變,和疲勞。
通過將模擬所得的功耗同實際情況的功耗進行比較,按標準在該工況下功耗應為2.75KW,同模擬所得的曲線平均在2.7KW 是相當接近的,從而也可證明分析的精度是非常高的。

圖11 導向桿頭部受力曲線
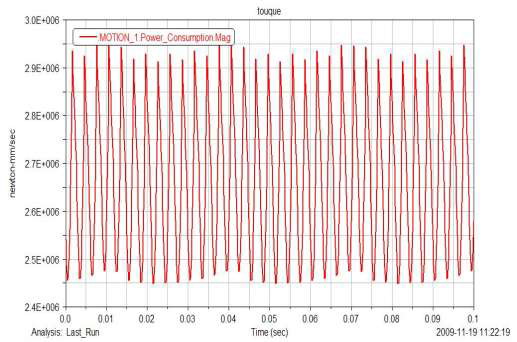
圖12 壓縮機功耗曲線
6. 結(jié)語
通過分析,我們發(fā)現(xiàn)理論公式推導,和試驗數(shù)據(jù)同軟件運動學動力學仿真所得數(shù)據(jù)能達成較好的一致性。這說明前期三維實體建模和實體模型上的力學模型搭建的正確性,并進一步驗證了軟件動力學仿真的可行性。這不僅節(jié)省了大量的人力物力資源,更重要的是縮短了產(chǎn)品設(shè)計周期以減短了產(chǎn)品的生產(chǎn)制造周期,提高了優(yōu)化設(shè)計的便捷性,降低了成本。