
隨著精確制導(dǎo)技術(shù)的不斷發(fā)展,導(dǎo)彈應(yīng)具有直接瞄準(zhǔn)目標(biāo)并打擊其要害部位,這就要求雷達(dá)不僅能對目標(biāo)整體進(jìn)行測量、跟蹤,而且還要從角度上分辨出目標(biāo)不同的部位,因此雷達(dá)必須具有很高的測角精度。但是當(dāng)高分辨導(dǎo)引頭雷達(dá)接近目標(biāo)時,角閃爍成為雷達(dá)測角的主要誤差來源,因?yàn)榇藭r目標(biāo)不再是點(diǎn)目標(biāo),而是由幾個強(qiáng)散射中心組成的分布式目標(biāo),回波信號由這些散射中心的回波矢量合成,這個合成等
效為一個視在中心的結(jié)果,中心位置就是實(shí)際測量的位置。隨著目標(biāo)相對運(yùn)動,散射中心的反射不斷變化,導(dǎo)致回波相位波前面的畸變,波前在接收天線口徑面上的傾斜和隨機(jī)擺動從而產(chǎn)生測角誤差,這種現(xiàn)象稱為“角閃爍”,嚴(yán)重時角閃爍將會導(dǎo)致跟蹤點(diǎn)偏離到目標(biāo)之外。因此角閃爍抑制問題是導(dǎo)引頭雷達(dá)必須解決的問題。
國內(nèi)在高分辨雷達(dá)角閃爍抑制方面作了許多研究,提出了基于和差通道距離像的單脈沖測角,但是這種算法中沒有考慮天線方向的影響,測角精度不高。本文基于此并對其不足有所改進(jìn),從高分辨雷達(dá)角閃爍產(chǎn)生的根本原因入手,提出一種基于高分辨雷達(dá)測角算法。該算法在測角前首先對目標(biāo)回波信號和差通道進(jìn)行一維成像,然后根據(jù)單脈沖雷達(dá)測角原理得到目標(biāo)在各個距離單元的角度信息,最后通過加平均處理得到目標(biāo)幾何中心空間角度。
1 高分辨雷達(dá)的角閃爍特性分析
線性調(diào)頻步進(jìn)信號是高分辨雷達(dá)常用的一種形式,該信號是把步進(jìn)頻率中的常載頻子脈沖換成線性調(diào)頻子脈沖,其優(yōu)點(diǎn)是保持步進(jìn)頻率信號能量和總帶寬不變的同時減少步進(jìn)階梯的周期數(shù),從而提高了系統(tǒng)數(shù)據(jù)利用率。信號的表達(dá)式為

其中,![]() 為基帶線性調(diào)頻子脈沖;線性調(diào)頻子脈沖個數(shù)為N;Tr為子脈沖重復(fù)周期;Tp為時寬;子脈沖帶寬BN=B/N;調(diào)頻斜率K=BN/Tp。相鄰子脈沖間的載頻增量為△f;第一個子脈沖的中心頻率為fo;則第i個子脈沖的中心頻率為fci=fo+iBN;其中i=0,1,2,…,N-1。
為基帶線性調(diào)頻子脈沖;線性調(diào)頻子脈沖個數(shù)為N;Tr為子脈沖重復(fù)周期;Tp為時寬;子脈沖帶寬BN=B/N;調(diào)頻斜率K=BN/Tp。相鄰子脈沖間的載頻增量為△f;第一個子脈沖的中心頻率為fo;則第i個子脈沖的中心頻率為fci=fo+iBN;其中i=0,1,2,…,N-1。
毫米波雷達(dá)發(fā)射信號波長遠(yuǎn)小于目標(biāo)尺寸,工作在目標(biāo)光學(xué)區(qū),后向散射回波可以認(rèn)為目標(biāo)上強(qiáng)散射中心回波合成。設(shè)目標(biāo)上有M個散射中心到雷達(dá)的徑向距離分別Rk,k=1,2,…,M,不考慮目標(biāo)和導(dǎo)引頭之間相對運(yùn)動,則第i個子脈沖回波為

式中,Tk=2Rk/c為第k個散射點(diǎn)延遲,將回波信號與本振信號混頻,輸出視頻信號為

由式(3)可以看出,調(diào)頻步進(jìn)信號視頻回波由兩部分組成,信號處理可以分為兩個步驟:首先在各個PRT內(nèi)進(jìn)行線性調(diào)頻信號脈沖壓縮,其次對壓縮后進(jìn)行PRT之間的IDFT處理。
不考慮目標(biāo)和導(dǎo)引頭之間的相對運(yùn)動,線形調(diào)頻信號![]() 的脈沖壓縮結(jié)果為
的脈沖壓縮結(jié)果為
取采樣時刻為t=iTr+τk可得采樣后第i個子脈沖的回波輸出為
這樣就實(shí)現(xiàn)了對N個脈沖串的壓縮,合成一個大帶寬脈沖信號,其總帶寬B=N△f,距離分辨率為△R=c/2B。當(dāng)△R目標(biāo)徑向尺寸時,IDFT處理所得的序列幅度{x(m)| m=1,2,…,M}反映了目標(biāo)上強(qiáng)散射中心的雷達(dá)散射截面積在徑向距離軸上的投影分布,稱為目標(biāo)的一維距離像。
2 高分辨雷達(dá)的角閃爍抑制
高分辨雷達(dá)由于在和、方位差、俯仰差3個通道都實(shí)現(xiàn)了高分辨處理,因此在3個通道均可以得到目標(biāo)高分辨距離像。以方位差通道為例,設(shè)目標(biāo)上有M個散射中心,第i(i=1,2,…,M)個散射中心的強(qiáng)度為ui,和通道目標(biāo)距離像用于目標(biāo)檢測,如果在和通道檢測到目標(biāo),則根據(jù)單脈沖測角原理,把目標(biāo)區(qū)域的通過和通道檢測的目標(biāo)譜峰所對應(yīng)的距離單元的方位差通道一維像幅度用對應(yīng)的和通道一維像幅度歸
一化,就可以得到目標(biāo)在該距離單元的方位角。即
![]()
式中,u∑(i)為和通道目標(biāo)距離像第i個散射點(diǎn)的幅度;u△(i)是差通道目標(biāo)距離像第i個散射點(diǎn)的幅度;Re表示取實(shí)部。F(θ)為雷達(dá)接收天線方向函數(shù),用sin函數(shù)來描述
![]()
式中,θo為天線等信號軸指向;θk為波束最大值方向與等信號軸方向的夾角;F'(θ)為其導(dǎo)數(shù)。由此可以求得以距離單元m為變量的目標(biāo)方位角度值,同樣方法可以求出以距離單元m為變量的目標(biāo)俯仰角度值。
目標(biāo)譜峰檢測的目的是為了去除弱散射截面距離單元對角度平滑的影響,使之不參與目標(biāo)幾何中心角度的估計過程。因?yàn)楦鶕?jù)角閃爍原理,幅度越小的單元對應(yīng)的角閃爍越大,最后經(jīng)過加權(quán)平滑處理后目標(biāo)徑向幾何中心的方位角為

式中,am為加權(quán)平滑算子,一般取線性加權(quán)算子W(am)=1。
高分辨距離像單脈沖測角算法步驟總結(jié)如下:
(1)回波信號高分辨出處理,得到3個通道的一維距離像。
(2)以和通道距離像用于目標(biāo)檢測,得到超過檢測電平的距離單元數(shù)目m。
(3)對兩個差通道的距離像用對應(yīng)距離單元m處距離像幅度用和通道幅度進(jìn)行歸一化,得到θm。
(4)把各個距離單元處的角度數(shù)據(jù)合成為整個目標(biāo)的幾何中心角度θ。
3 仿真與實(shí)測結(jié)果分析
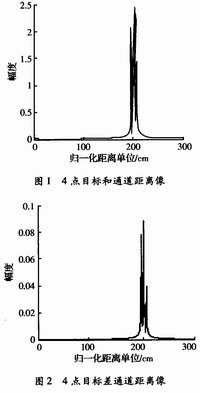
為了驗(yàn)證算法的有效性,設(shè)目標(biāo)上有4個強(qiáng)散射中心,信號參數(shù):帶寬B=200 MHz,初始頻率fo=60 MHz,脈沖個數(shù)N=20。目標(biāo)參數(shù):ri是第i個散射中心與雷達(dá)的相對徑向距離,r=[196,198,200,202],單位:cm,θi是第i個散射中心相對雷達(dá)視線的方位角,θ=[0.0410,-0.010 2,0.019 0,-0.050],單位:弧度,所有散射點(diǎn)散射強(qiáng)度均相等均為1。根據(jù)以上一維成像算法可以得到目標(biāo)和通道、差通道距離像分別如圖1和圖2所示。采用高分辨距離像測角算法測量的角度θ=[0.042 0,-0.014 2,0.020,-0.056],從以上可以看出測的目標(biāo)角度與實(shí)際目標(biāo)散射中心的角度是相當(dāng)吻合,均勻加權(quán)后得到目標(biāo)徑向幾何中心的方位角θ=-2.05×10-3。
下面以某導(dǎo)引頭雷達(dá)對某飛機(jī)跟蹤過程為例仿真,信號和目標(biāo)參數(shù)如上,跟蹤距離為390~210 m,目標(biāo)在水平面內(nèi)做勻速運(yùn)動,目標(biāo)上有4個強(qiáng)散射點(diǎn)。圖3是分別采用點(diǎn)目標(biāo)測角算法與高分辨測角算法得到的跟蹤角度與目標(biāo)真實(shí)角度值偏差比較,可以看出后者的誤差遠(yuǎn)小于前者,已經(jīng)處于目標(biāo)尺寸范圍之內(nèi)。

4 結(jié)束語
從目標(biāo)角閃爍產(chǎn)生的根本原因入手,分別在和差通道對回波信號進(jìn)行一維成像處理后,通過高分辨測角算法求出其對應(yīng)距離單元的方位角與俯仰角,然后將多個距離單元角度進(jìn)行加權(quán)平均處理,得到目標(biāo)徑向幾何中心對應(yīng)的空間角度。仿真結(jié)果表明,能夠很好地抑制角閃爍引起的角度測量偏差,是提高角跟蹤精度的有效途徑之一。