引言
隨著半導(dǎo)體工藝技術(shù)與處理器設(shè)計技術(shù)的不斷提高,嵌入式處理器的速度愈來愈快;而非易失性存儲器的讀取速度卻遠(yuǎn)遠(yuǎn)跟不上CPU的發(fā)展。傳統(tǒng)的單片機運行模式——機器代碼存儲在非易失性存儲器(如ROM,F(xiàn)LASH),在運行時由CPU直接從其中取出指令執(zhí)行——逐漸顯得力不從心。如果繼續(xù)沿用傳統(tǒng)的程序運行模式,那么在絕大多數(shù)時間內(nèi)高速CPU將處于空閑等待狀態(tài),這既浪費了CPU的計算能力,也無法實現(xiàn)高密度數(shù)據(jù)流的實時處理與傳輸。而在短期之內(nèi),半導(dǎo)體工業(yè)界尚無法實現(xiàn)低成本的非易失性高速存儲器技術(shù)。為了解決上述處理器和非易失性存儲器之間速度不匹配的矛盾,工程師們在嵌入式系統(tǒng)領(lǐng)域內(nèi)引用了Boot技術(shù)和Remap技術(shù)。而要正確理解Boot技術(shù)和Remap技術(shù),必須先建立Memory Map(存儲器映射)的概念。
技術(shù)概念描述
Memory Map
計算機最重要的功能單元之一是Memory。Memory是眾多存儲單元的集合,為了使CPU準(zhǔn)確地找到存儲有某個信息的存儲單元,必須為這些單元分配一個相互區(qū)別的“身份證號”,這個“身份證號”就是地址編碼。在嵌入式處理器內(nèi),集成了多種類型的Memory,通常,我們稱同一類型的Memory為一個Memory Block。一般情況下,處理器設(shè)計者會為每一個Memory Block分配一個數(shù)值連續(xù)、數(shù)目與其存儲單元數(shù)相等、以16進(jìn)制表示的自然數(shù)集合作為該Memory Block的地址編碼。這種自然數(shù)集合與Memory Block的對應(yīng)關(guān)系,就是Memory Map(存儲器映射),有時也叫Address Map(地址映射)。實際上,Address Map在字面意義上更加貼切。
需要強調(diào)的是,Memory Map是一個邏輯概念,是計算機系統(tǒng)在(上電)復(fù)位后才建立起來的。Memory Map相當(dāng)于這樣一個數(shù)學(xué)函數(shù):函數(shù)的輸入量是地址編碼,輸出量被尋址單元中的數(shù)據(jù)。當(dāng)計算機系統(tǒng)掉電后或復(fù)位時,這個數(shù)學(xué)函數(shù)不復(fù)存在,只剩下計算機系統(tǒng)中實現(xiàn)這個數(shù)學(xué)函數(shù)的物理基礎(chǔ)——電路連接。也可以這樣認(rèn)為:Memory Map是計算機系統(tǒng)(上電)復(fù)位時的預(yù)備動作,是一個將CPU所擁有的地址編碼資源向系統(tǒng)內(nèi)各個物理存儲器塊分配的自動過程。
Boot/Bootload
Boot在計算機專業(yè)英文中的意思是“引導(dǎo)”,它是計算機系統(tǒng)(上電)復(fù)位后CPU的第一個機器動作。那么,Boot引導(dǎo)的是什么呢?簡要地說,Boot就是引導(dǎo)CPU如何裝入機器指令。最簡單的Boot動作就是8位單片機系統(tǒng)復(fù)位后從復(fù)位向量中取出跳轉(zhuǎn)指令,轉(zhuǎn)移到用戶程序代碼段執(zhí)行的這個過程。
通常,在計算機系統(tǒng)中,(上電)復(fù)位后除了執(zhí)行Boot動作,還跟隨著一個Load過程。一般情況下,該Load從低速非易失性存儲器中“搬運”一些數(shù)據(jù)到高速易失性存儲器中。Boot和Load連續(xù)執(zhí)行,一氣呵成,我們稱之為Bootload。最典型的例子之一就是DSP實時信號處理系統(tǒng),系統(tǒng)上電后,將存儲在EEPROM中的實時信號處理程序復(fù)制到系統(tǒng)的RAM中,然后CPU直接從RAM中讀取機器指令運行。
Remap
Remap與計算機的異常處理機制是緊密相關(guān)的。
完整的計算機系統(tǒng)必須具備異常處理能力。當(dāng)異常產(chǎn)生時,CPU在硬件驅(qū)動機制下跳轉(zhuǎn)到預(yù)先設(shè)定的存儲器單元中,取出相應(yīng)的異常處理程序的入口地址, 并根據(jù)該入口地址進(jìn)入異常處理程序。這個保存有異常處理程序入口地址的存儲器單元就是通常所說的“異常入口”,單片機系統(tǒng)中也叫“中斷入口”。實際的計算機系統(tǒng)有多種類型的異常,CPU設(shè)計人員為了簡化芯片設(shè)計,一般將所有的異常入口集中起來置于非易失性存儲器中,并在系統(tǒng)上電時映射到一個固定的連續(xù)地址空間上。位于這個地址空間上的異常入口集合就是“異常向量表”。
系統(tǒng)上電后的異常向量表是從低速非易失性存儲器映射得到的。隨著處理器速度的不斷提高,很自然地,人們希望計算機系統(tǒng)在異常處理時也充分發(fā)揮出CPU的處理能力,而非易失性存儲器的讀取速度使得CPU只能以多個空閑等待同期來獲取異常向量,這樣就限制了CPU計算能力的充分發(fā)揮。尤其是非易失性存儲器位寬小于CPU位寬時,這種負(fù)面的影響更加明顯。于是,Remap技術(shù)被引入,以提高系統(tǒng)對異常的實時響應(yīng)能力。
從Remap這個英文單詞的構(gòu)成不難看出,它是對此前已確立的存儲器映射的再次修改。從本質(zhì)上講,Map和Remap是一樣的,都是將地址編碼資源分配給存儲器塊,只不過二者產(chǎn)生的時間不同:前者在系統(tǒng)上電的時刻發(fā)生,是任何計算機系統(tǒng)都必需的;而后者在系統(tǒng)上電后穩(wěn)定運行的時刻發(fā)生,對計算機系統(tǒng)設(shè)計人員來說是可選的。典型的8位單片機系統(tǒng)中,就沒有使用Remap技術(shù)。
完整的Remap過程實際上通常始于系統(tǒng)的Bootload過程。具體執(zhí)行動作為:Bootload將非易失性存儲器中的異常向量復(fù)制到高速易失性存儲器塊的一端,然后執(zhí)行Remap命令,將位于高速易失性存儲器中的異常向量塊映射到異常向量表地址空間上。此后,系統(tǒng)若產(chǎn)生異常,CPU將從已映射到異常微量表地址空間的高速非易失性存儲器中讀取異常向量。具體到典型的ARM7嵌入式系統(tǒng)中,就是由Bootload程序?qū)⑵瑑?nèi)或片外的Flash/ROM中的異常向量復(fù)制到片內(nèi)的SRAM中指定的存在器單元中,然后再執(zhí)行Remap命令。由于片內(nèi)的SRAM數(shù)據(jù)位寬通常與CPU數(shù)據(jù)位寬相等,因而CPU可以無等待地全速跳入異常處理程序,獲得最佳的實時異常響應(yīng)。
LPC2000的Boot和Remap解析
從上面的技術(shù)描述中可知,典型的Boot、Memory Map和Remap的時間順序應(yīng)該是:Memory Map-〉Boot-〉Remap。但是,LPC2000處理器中這三個動作的順序卻有一點不同,依次為Memory Map-〉Remap-〉Boot-〉Remap,最后一個Remap過程是用戶可選的,可執(zhí)行也可不執(zhí)行。每當(dāng)系統(tǒng)復(fù)位以后,LPC2000處理器就順次執(zhí)行上述四個過程,下面分析這幾個階段。為簡化起見,以總線不開放的LPC2104處理器為例。
LPC2106的片上存儲器分類
LPC2104片內(nèi)的存儲器類型只有兩種:Flash塊和SRAM塊。其中,部分Flash存儲器塊在芯片出廠前由Philips寫入了Bootload程序和64字節(jié)的異常向量表。為方便討論,我們稱這部分Flash塊為Bootload子塊,其大小為8KB。如前所述,在處理器未上電之前或復(fù)位時,F(xiàn)lash塊和SRAM塊僅僅是兩個沒有地址編碼的物理存儲器,與地址編碼尚未建立起實際的映射關(guān)系。
Memory Map
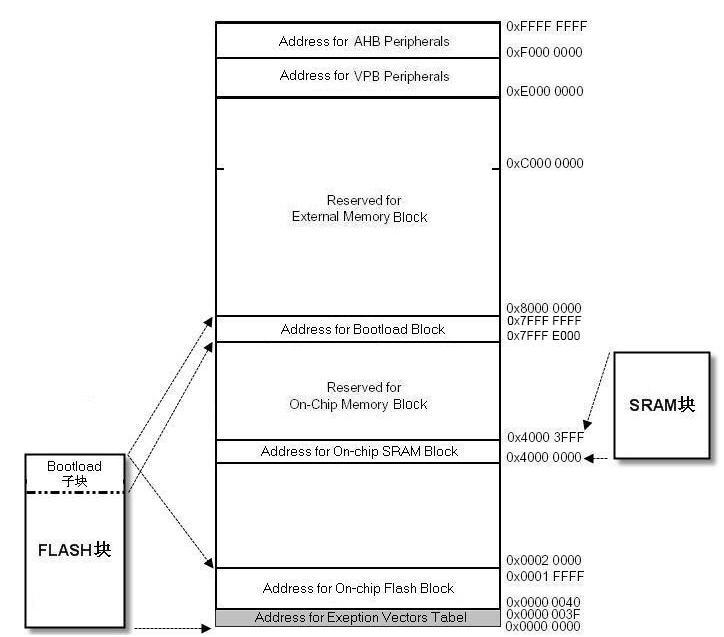
LPC2104處理器(上電)復(fù)位以后,F(xiàn)lash塊和SRAM塊的地址映射結(jié)果為:SRAM占據(jù)0x40000000—0x40003FFF范圍的地址編碼空間;Flash占據(jù)0x00000000—0x0001FFFF范圍的地址編碼空間。該映射結(jié)果是個中間態(tài),只存在極短的時間,應(yīng)用系統(tǒng)開發(fā)人員無法看到這個中間態(tài)。處理器內(nèi)核外圍模塊的地址映射結(jié)果為0xE0000000—0xFFFFFFFF。
Remap
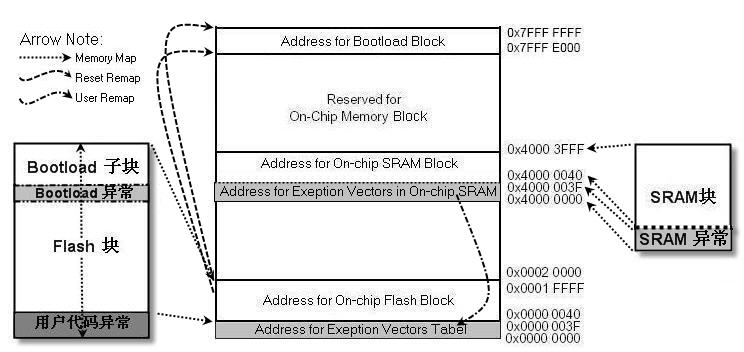
Memory Map完成以后,緊接著LPC2104會作一次Remap,這次Remap操作的對象是Bootload子塊,由處理的內(nèi)部硬件邏輯執(zhí)行完成,不受開發(fā)人員的控制。經(jīng)過Remap后,Bootload子塊被整體Remap到了0x7FFFE000—0x7FFFFFFF的片內(nèi)高地址內(nèi)存空間;同時,原Memory Map后占用0x00000000—0x0000003F地址空間的那部分64 字節(jié)大小的Flash子塊被暫時注銷映射關(guān)系,由Bootload子塊中的異常向量部分取而代之。
至此,F(xiàn)lash塊對內(nèi)存地址空間的占用情況如下:
1、除去因Remap被暫時注銷了映射關(guān)系的那小部分64字節(jié)的Flash子塊外,F(xiàn)lash塊作為一個整體占用的地址編碼空間為0x00000040—0x0001FFFF;
2、同時,Bootload子塊又占用了0x7FFFE000—0x7FFFFFF的地址編碼空間,Bootload子塊中的異常向量表部分占用了0x00000000—0x0000003F。
因此,Bootload子塊中的異常向量表部分實際上是占用了重復(fù)占用了三段地址編碼空間:0x00000000—0x0000003F、0x0001E000—0x0001E03F以及0x7FFFE000—0x7FFFE03F。
圖2中,存儲器的映射順序為:Memory Map-〉Reset Remap-〉Bootload Remap。
SRAM塊和內(nèi)核外圍模塊的映射關(guān)系在Remap之后保持不變,可參見圖1。
* - 本貼最后修改時間:2005-3-10 17:31:19 修改者:andrewpei
* - 修改原因:Append
引言
隨著半導(dǎo)體工藝技術(shù)與處理器設(shè)計技術(shù)的不斷提高,嵌入式處理器的速度愈來愈快;而非易失性存儲器的讀取速度卻遠(yuǎn)遠(yuǎn)跟不上CPU的發(fā)展。傳統(tǒng)的單片機運行模式——機器代碼存儲在非易失性存儲器(如ROM,F(xiàn)LASH),在運行時由CPU直接從其中取出指令執(zhí)行——逐漸顯得力不從心。如果繼續(xù)沿用傳統(tǒng)的程序運行模式,那么在絕大多數(shù)時間內(nèi)高速CPU將處于空閑等待狀態(tài),這既浪費了CPU的計算能力,也無法實現(xiàn)高密度數(shù)據(jù)流的實時處理與傳輸。而在短期之內(nèi),半導(dǎo)體工業(yè)界尚無法實現(xiàn)低成本的非易失性高速存儲器技術(shù)。為了解決上述處理器和非易失性存儲器之間速度不匹配的矛盾,工程師們在嵌入式系統(tǒng)領(lǐng)域內(nèi)引用了Boot技術(shù)和Remap技術(shù)。而要正確理解Boot技術(shù)和Remap技術(shù),必須先建立Memory Map(存儲器映射)的概念。
技術(shù)概念描述
Memory Map
計算機最重要的功能單元之一是Memory。Memory是眾多存儲單元的集合,為了使CPU準(zhǔn)確地找到存儲有某個信息的存儲單元,必須為這些單元分配一個相互區(qū)別的“身份證號”,這個“身份證號”就是地址編碼。在嵌入式處理器內(nèi),集成了多種類型的Memory,通常,我們稱同一類型的Memory為一個Memory Block。一般情況下,處理器設(shè)計者會為每一個Memory Block分配一個數(shù)值連續(xù)、數(shù)目與其存儲單元數(shù)相等、以16進(jìn)制表示的自然數(shù)集合作為該Memory Block的地址編碼。這種自然數(shù)集合與Memory Block的對應(yīng)關(guān)系,就是Memory Map(存儲器映射),有時也叫Address Map(地址映射)。實際上,Address Map在字面意義上更加貼切。
需要強調(diào)的是,Memory Map是一個邏輯概念,是計算機系統(tǒng)在(上電)復(fù)位后才建立起來的。Memory Map相當(dāng)于這樣一個數(shù)學(xué)函數(shù):函數(shù)的輸入量是地址編碼,輸出量被尋址單元中的數(shù)據(jù)。當(dāng)計算機系統(tǒng)掉電后或復(fù)位時,這個數(shù)學(xué)函數(shù)不復(fù)存在,只剩下計算機系統(tǒng)中實現(xiàn)這個數(shù)學(xué)函數(shù)的物理基礎(chǔ)——電路連接。也可以這樣認(rèn)為:Memory Map是計算機系統(tǒng)(上電)復(fù)位時的預(yù)備動作,是一個將CPU所擁有的地址編碼資源向系統(tǒng)內(nèi)各個物理存儲器塊分配的自動過程。
Boot/Bootload
Boot在計算機專業(yè)英文中的意思是“引導(dǎo)”,它是計算機系統(tǒng)(上電)復(fù)位后CPU的第一個機器動作。那么,Boot引導(dǎo)的是什么呢?簡要地說,Boot就是引導(dǎo)CPU如何裝入機器指令。最簡單的Boot動作就是8位單片機系統(tǒng)復(fù)位后從復(fù)位向量中取出跳轉(zhuǎn)指令,轉(zhuǎn)移到用戶程序代碼段執(zhí)行的這個過程。
通常,在計算機系統(tǒng)中,(上電)復(fù)位后除了執(zhí)行Boot動作,還跟隨著一個Load過程。一般情況下,該Load從低速非易失性存儲器中“搬運”一些數(shù)據(jù)到高速易失性存儲器中。Boot和Load連續(xù)執(zhí)行,一氣呵成,我們稱之為Bootload。最典型的例子之一就是DSP實時信號處理系統(tǒng),系統(tǒng)上電后,將存儲在EEPROM中的實時信號處理程序復(fù)制到系統(tǒng)的RAM中,然后CPU直接從RAM中讀取機器指令運行。
Remap
Remap與計算機的異常處理機制是緊密相關(guān)的。
完整的計算機系統(tǒng)必須具備異常處理能力。當(dāng)異常產(chǎn)生時,CPU在硬件驅(qū)動機制下跳轉(zhuǎn)到預(yù)先設(shè)定的存儲器單元中,取出相應(yīng)的異常處理程序的入口地址, 并根據(jù)該入口地址進(jìn)入異常處理程序。這個保存有異常處理程序入口地址的存儲器單元就是通常所說的“異常入口”,單片機系統(tǒng)中也叫“中斷入口”。實際的計算機系統(tǒng)有多種類型的異常,CPU設(shè)計人員為了簡化芯片設(shè)計,一般將所有的異常入口集中起來置于非易失性存儲器中,并在系統(tǒng)上電時映射到一個固定的連續(xù)地址空間上。位于這個地址空間上的異常入口集合就是“異常向量表”。
系統(tǒng)上電后的異常向量表是從低速非易失性存儲器映射得到的。隨著處理器速度的不斷提高,很自然地,人們希望計算機系統(tǒng)在異常處理時也充分發(fā)揮出CPU的處理能力,而非易失性存儲器的讀取速度使得CPU只能以多個空閑等待同期來獲取異常向量,這樣就限制了CPU計算能力的充分發(fā)揮。尤其是非易失性存儲器位寬小于CPU位寬時,這種負(fù)面的影響更加明顯。于是,Remap技術(shù)被引入,以提高系統(tǒng)對異常的實時響應(yīng)能力。
從Remap這個英文單詞的構(gòu)成不難看出,它是對此前已確立的存儲器映射的再次修改。從本質(zhì)上講,Map和Remap是一樣的,都是將地址編碼資源分配給存儲器塊,只不過二者產(chǎn)生的時間不同:前者在系統(tǒng)上電的時刻發(fā)生,是任何計算機系統(tǒng)都必需的;而后者在系統(tǒng)上電后穩(wěn)定運行的時刻發(fā)生,對計算機系統(tǒng)設(shè)計人員來說是可選的。典型的8位單片機系統(tǒng)中,就沒有使用Remap技術(shù)。
完整的Remap過程實際上通常始于系統(tǒng)的Bootload過程。具體執(zhí)行動作為:Bootload將非易失性存儲器中的異常向量復(fù)制到高速易失性存儲器塊的一端,然后執(zhí)行Remap命令,將位于高速易失性存儲器中的異常向量塊映射到異常向量表地址空間上。此后,系統(tǒng)若產(chǎn)生異常,CPU將從已映射到異常微量表地址空間的高速非易失性存儲器中讀取異常向量。具體到典型的ARM7嵌入式系統(tǒng)中,就是由Bootload程序?qū)⑵瑑?nèi)或片外的Flash/ROM中的異常向量復(fù)制到片內(nèi)的SRAM中指定的存在器單元中,然后再執(zhí)行Remap命令。由于片內(nèi)的SRAM數(shù)據(jù)位寬通常與CPU數(shù)據(jù)位寬相等,因而CPU可以無等待地全速跳入異常處理程序,獲得最佳的實時異常響應(yīng)。
LPC2000的Boot和Remap解析
從上面的技術(shù)描述中可知,典型的Boot、Memory Map和Remap的時間順序應(yīng)該是:Memory Map-〉Boot-〉Remap。但是,LPC2000處理器中這三個動作的順序卻有一點不同,依次為Memory Map-〉Remap-〉Boot-〉Remap,最后一個Remap過程是用戶可選的,可執(zhí)行也可不執(zhí)行。每當(dāng)系統(tǒng)復(fù)位以后,LPC2000處理器就順次執(zhí)行上述四個過程,下面分析這幾個階段。為簡化起見,以總線不開放的LPC2104處理器為例。
LPC2106的片上存儲器分類
LPC2104片內(nèi)的存儲器類型只有兩種:Flash塊和SRAM塊。其中,部分Flash存儲器塊在芯片出廠前由Philips寫入了Bootload程序和64字節(jié)的異常向量表。為方便討論,我們稱這部分Flash塊為Bootload子塊,其大小為8KB。如前所述,在處理器未上電之前或復(fù)位時,F(xiàn)lash塊和SRAM塊僅僅是兩個沒有地址編碼的物理存儲器,與地址編碼尚未建立起實際的映射關(guān)系。
Memory Map
LPC2104處理器(上電)復(fù)位以后,F(xiàn)lash塊和SRAM塊的地址映射結(jié)果為:SRAM占據(jù)0x40000000—0x40003FFF范圍的地址編碼空間;Flash占據(jù)0x00000000—0x0001FFFF范圍的地址編碼空間。該映射結(jié)果是個中間態(tài),只存在極短的時間,應(yīng)用系統(tǒng)開發(fā)人員無法看到這個中間態(tài)。處理器內(nèi)核外圍模塊的地址映射結(jié)果為0xE0000000—0xFFFFFFFF。
Remap
Memory Map完成以后,緊接著LPC2104會作一次Remap,這次Remap操作的對象是Bootload子塊,由處理的內(nèi)部硬件邏輯執(zhí)行完成,不受開發(fā)人員的控制。經(jīng)過Remap后,Bootload子塊被整體Remap到了0x7FFFE000—0x7FFFFFFF的片內(nèi)高地址內(nèi)存空間;同時,原Memory Map后占用0x00000000—0x0000003F地址空間的那部分64 字節(jié)大小的Flash子塊被暫時注銷映射關(guān)系,由Bootload子塊中的異常向量部分取而代之。
至此,F(xiàn)lash塊對內(nèi)存地址空間的占用情況如下:
1、除去因Remap被暫時注銷了映射關(guān)系的那小部分64字節(jié)的Flash子塊外,F(xiàn)lash塊作為一個整體占用的地址編碼空間為0x00000040—0x0001FFFF;
2、同時,Bootload子塊又占用了0x7FFFE000—0x7FFFFFF的地址編碼空間,Bootload子塊中的異常向量表部分占用了0x00000000—0x0000003F。
因此,Bootload子塊中的異常向量表部分實際上是占用了重復(fù)占用了三段地址編碼空間:0x00000000—0x0000003F、0x0001E000—0x0001E03F以及0x7FFFE000—0x7FFFE03F。
圖2中,存儲器的映射順序為:Memory Map-〉Reset Remap-〉Bootload Remap。
SRAM塊和內(nèi)核外圍模塊的映射關(guān)系在Remap之后保持不變,可參見圖1。
* - 本貼最后修改時間:2005-3-10 17:31:19 修改者:andrewpei
* - 修改原因:Append
Boot
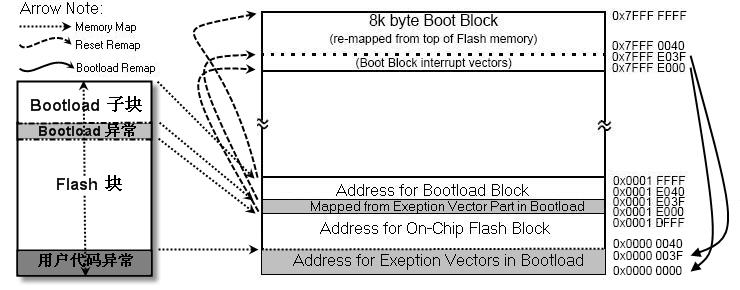
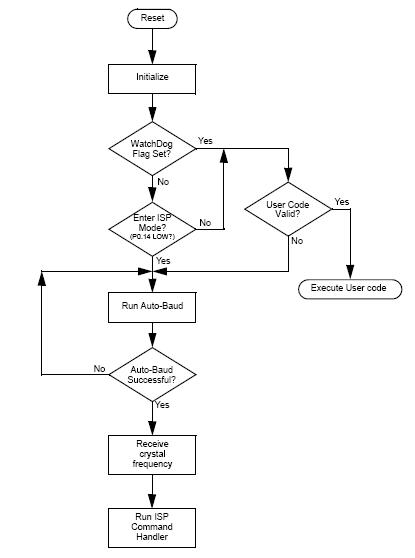
LPC2104有效的異常向量表地址編碼空間是0x00000000—0x0000003F(嚴(yán)格來說應(yīng)該是0x00000000—0x0000001F)。處理器復(fù)位后的Boot動作就是從0x00000000處起始字中取出跳轉(zhuǎn)指令,開始程序的執(zhí)行。由于處理器復(fù)位后,映射到0x00000000—0x0000003F地址空間的異常向量表源于Bootload子塊,因此CPU實際上開始執(zhí)行的是Philips在芯片出廠前寫入的Bootload程序。
進(jìn)入Bootload后,程序首先檢查看門狗溢出標(biāo)志是否置位。
若看門狗溢出標(biāo)志置位,則表明當(dāng)前的系統(tǒng)復(fù)位是內(nèi)部軟復(fù)位,CPU下一步將對Flash塊中的異常向量表進(jìn)行加和校驗。如果加和檢驗結(jié)果為零,Bootload程序?qū)⒊蜂NBootload子塊中異常向量表部分在0x00000000—0x00000003F地址空間上的映射,恢復(fù)Flash塊的異常向量表在這64字節(jié)地址空間上的映射關(guān)系(如圖3),然后跳轉(zhuǎn)到異常向量表地址0x00000000處轉(zhuǎn)入用戶程序的執(zhí)行。如果加和校驗結(jié)果不為零,Bootload程序?qū)⑦M(jìn)行UART0接口的波特率自動偵測,隨時響應(yīng)ISP宿主機的編程請求,執(zhí)行處理器芯片的ISP編程工作。
若Bootload沒有發(fā)現(xiàn)看門狗溢出標(biāo)志置位,則表明當(dāng)前的系統(tǒng)復(fù)位是外部硬復(fù)位,CPU將采樣P0.14引腳的外部邏輯電平輸入。如果為0,Bootload執(zhí)行UART0的自動波特率偵測,隨時響應(yīng)ISP宿主機的編程請求;如果為1,Bootload的后續(xù)動作將與前面檢測到看門狗溢出標(biāo)志置位的程序執(zhí)行完全相同。
Remap(可選)
最后這一步可選的Remap動作完全處于用戶的控制之下,Remap的對象是片內(nèi)SRAM存儲器塊的異常向量部分,共計64字節(jié)大小。用戶可以編程決定何時Remap、Remap之后是否再修改異常向量表以及如何修改異常向量表等等。需要強調(diào)的是,引發(fā)Remap動作的指令與建立SRAM塊中異常向量的所有功能代碼全部駐留在Flash塊的用戶編程區(qū)中,是用戶應(yīng)用軟件的一部分。
曾經(jīng)有網(wǎng)友對Philips在LPC2000系列處理器中引入這個可選的Remap功能提出質(zhì)疑:LPC2000系列處理器片內(nèi)的Flash塊被分割成了兩組,每組都配備了相互獨立的128位寬度的讀取緩沖,在絕大多數(shù)情況下,CPU從Flash塊的訪問是全速進(jìn)行的,不存在有等待的狀況;另一方面,一般應(yīng)用LPC2000的嵌入式系統(tǒng)并不需要動態(tài)地改變異常向量表。因此,對片內(nèi)SRAM進(jìn)行Remap后,并不能提高處理器對異常的響應(yīng)能力,實際意義不大。
事實上,LPC2000系列處理器引入SRAM的Remap功能對于IAP操作具有重要的意義。相對于其它基于ARM7DMI內(nèi)核的處理器而言,LPC2000系列處理器有一個獨具特色的功能—IAP。在IAP擦除/寫入操作時,片上Flash塊,包括該塊上的異常向量部分,是無法被訪問讀取的,為了在IAP擦除/寫入操作時有效地響應(yīng)異常,必須在調(diào)用IAP擦除/寫入操作之前,將SRAM中的異常向量部分提前映射到系統(tǒng)的異常向量表地址空間上。(待續(xù))