
在希臘語中ACOPOS有輕而易舉的意思。貝加萊(B&R)公司用它來為新一代的伺服系統(tǒng)命名,因為該系統(tǒng)已經集成在B&R Automation Studio(TM)開發(fā)系統(tǒng)中。
前言
緊湊的外形尺寸和卓越的性能是對現代伺服驅動器的重要要求。貝加萊驅動系統(tǒng)在與所選電機完美匹配的同時亦能兼顧機械性能的要求。對于需要卓越動態(tài)性能和定位精度的應用,ACOPOS系列也有非常適合的同步伺服電機。高能磁路和擁有專利權的線圈排布方式確保了結構的緊湊性。貝加萊可編程控制器(PCC)系統(tǒng)和伺服控制(ACOPOS)系統(tǒng)在啤酒包裝生產線上的應用完全能夠滿足膜包機所有電機的基本運動控制和它們之間的同步運動控制。
系統(tǒng)的配置與方案
一般的,膜包機可以由主驅動、進瓶、分瓶、送紙板、送切膜和熱通道六個部分組成。按照不同的設計思想,各個廠家生產的膜包機的機械結構不盡相同,所選擇的可編程控制系統(tǒng)以及伺服控制系統(tǒng)也不一樣。本文將以國內某知名膜包機為例,介紹貝加萊可編程控制器(PCC)系統(tǒng)和伺服控制(ACOPOS)系統(tǒng)在其中為電氣控制部分的應用。
1.膜包機的硬件機構
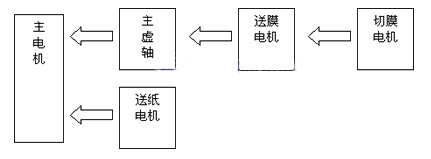
擁有同步電子齒輪、電子凸輪的伺服控制系統(tǒng)早已經取代繁的機械凸輪機構,可以比較容易的按照設計者的要求實現運動對象之間的同步關系。膜包機的幾個運動機構就是使用了伺服電機作為驅動軸,完成了從進瓶、送紙板到送切膜的任務。使用一臺伺服電機的主驅動會作為其他幾根軸的同步對象,所有的角度相位關系也都根據主驅動電機而定。圖1為五個電機在機器中的大致位置。

2.控制系統(tǒng)
使用貝加萊的伺服控制系統(tǒng)完全能夠滿足膜包機所有電機的基本運動控制和它們之間的同步運動控制。集成了包裝過程中的邏輯控制并帶有顯示功能的人機面板PP41,一方面可以通過參數的輸入給運動控制部分傳達命令以及運動特征參數,另一方面可以及時反饋當前機器的運行狀況和報警狀態(tài)。

(1) 現場總線(CAN BUS)
CAN總線具有強有力的錯誤檢測能力及差分驅動功能,在強噪聲十分苛刻的環(huán)境中仍運行良好,因此,在傳媒傳輸和線路設計方面,CAN總線可以很容易的適合大多數應用場合。
通過現場總線(CAN BUS)的連接,人機面板(PP41)和各個伺服控制器之間的通信變得十分可靠,尤其為伺服運動控制系統(tǒng)中的在線修改同步特征參數提供了保證 (圖2)。
(2) 基本運動控制
貝加萊的伺服運動控制系統(tǒng)(ACOPOS SERVO)采用了面向對象型的控制方式。在貝加萊開發(fā)平臺Automation Studio中使用高級語言(Basic 或者 C),只要針對一個伺服控制器創(chuàng)建一個運動對象(Axis Object)后,就可以利用創(chuàng)建的指針完成對電機不同的運動控制。
膜包機的各個電機的單獨調試與尋參、主驅動的起停、以及分瓶電機的配合都會用到基本運動控制。這樣的控制方式目標明確,便于控制程序的編寫。
(3) 同步運動控制
同步運動控制是根據一定的數學模型,一個伺服電機相對于另一個伺服電機要完成一定的運動軌跡所作的控制,也就是通常所說的電子齒輪和電子凸輪的概念。
對于ACOPOS SERVO來說,參與同步的兩臺伺服電機具有主從關系。膜包機的同步運動控制一般是在位置上的同步。在CAN總線上,主軸會把當前的位置信息以一定的微小間隔時間傳送至CAN網絡上,而參與同步的從軸也會實時地取得這些信息,再實時地根據數學模型計算出當前從軸要走的位置,并且運行當前的軌跡。
通過數學模型,我們可以得到從軸相對于主軸的輪廓關系(Profiler)。這些輪廓的特征參數在電機參與同步之前要下載到伺服控制器中。PP41會利用CAN總線完成參數的下載任務。ACOPOS SERVO可以一次設定11組輪廓關系,使用事件(Event)的方式,使從軸可以在設定的輪廓關系組中按照運動的需要方便的跳轉。事件的觸發(fā)可以有很多種,可以使用PP41向下發(fā)送4個SIGNAL信息,也可以是伺服控制器上的2個觸發(fā)信息。因此,我們可以把主從的輪廓關系按照一定的要求分解成幾個階段(State),通過階段之間的跳轉,可以完成不同階段的同步要求。
在膜包機中,送膜電機在接收到送膜信號后,當主電機再運行到一定相位時開始同步運動,直至主電機完成一個周期,送膜電機也完成一次送膜任務。我們可以分成3個階段,即送膜電機等待送膜信號、主電機到達送膜起始相位,以及跟著主電機完成一次送膜任務。送膜時,要根據先慢后快的原則,最后一個階段還可以再次細分成幾個階段。
(4) 虛軸概念
在ACOPOS SERVO中,針對每一個伺服電機而創(chuàng)建的運動對象都具有一個虛擬的軸,也就是虛軸。這個虛軸和實軸一樣,一方面能夠作為從軸,跟著主軸完成同步軌跡,另一方面還能夠作為主軸,讓其他從軸參與同步。由于虛軸概念的引入,使得一個伺服電機也能夠和自己的虛軸發(fā)生同步關系。
如果在送膜電機和主電機之間加一個主虛軸,那么可以把等待送膜信號、等待主電機的起始相位、與主電機完成一個周期這3個階段的輪廓關系加在主虛軸上。送膜電機可以與主虛軸同步,完成先慢后快的幾個階段的同步任務。這樣,可以在主電機不運動的情況下,讓虛軸走一個周期,送膜電機就能夠完成一次送膜任務,也就是手動送膜一次,便于一開始送膜位置的前后調整。
控制過程中的功能實現
ACOPOS SERVO在膜包機中要完成的任務是:驅動推瓶桿和挑膜桿、送紙板、送切膜和分瓶。其中發(fā)生同步關系的任務有送紙板、送膜和切膜。圖3示意了幾個軸之間的主從關系,箭頭左邊為主,右邊為從。送瓶電機雖然沒有參與同步,但是在分瓶過程中,它和壓板、擋板都是以主電機的相位角度作為依據,執(zhí)行著相互關聯的起停,共同完成分瓶任務。
1.白膜的送切
送膜和切膜是膜包機中最重要的環(huán)節(jié),也是控制過程中最困難的部分,尤其是送膜。
根據工藝的要求,當送膜起動后的開始階段,出膜的速度應該和待包的一組瓶的速度保持一致,壓在紙板下膜的部分應該是預先設定的長度,而且不能夠發(fā)生卷曲。剩下的幾個階段要快速出膜,以保證挑膜桿能夠不受阻礙地將后面的薄膜挑出。挑膜的這幾個階段的速度一定也要控制的適當,過快會導致薄膜曲皺,過慢會引起挑膜桿受阻。無論是幾個階段,也不管中間出膜的速度快慢,最終一定要保證主電機在執(zhí)行一個周期后,送膜電機也要正好完成一次送膜。也就是送膜電機和主電機的一次同步。
在切膜機構上,不同的廠家設計的也不一樣。目前有兩種機構采用的較多,一種是在送膜電機軸上采用電磁離合器吸合一個切刀綁定后旋轉一圈;另外一種是把切刀作為一個獨立的電機軸和送膜電機軸保持同步。切膜值得重視的是切刀旋轉切膜的瞬間線速度應該大于薄膜被切點的線速度,否則薄膜可能會刮壞、切不斷,甚至造成切刀齒崩壞。科時敏公司的膜包機采用獨立的切刀電機軸,和送膜電機參與同步的切刀可以更直接的調整同步時幾個同步階段的快慢,保證了每次切膜的位置精度,同時還可以參與彩膜控制。
白膜的送切還應該注意一個很重要的問題:不同裹包速度下的膜長控制。為了保證送膜后膜輥筒不再因為慣性而繼續(xù)出膜,都會在膜輥筒旁邊加上剎車裝置。受了剎車裝置的拉拽因素的影響,再加上送膜輥筒的摩擦因素,使得實際的膜長在不同的裹包速度下會有變化。換句話說就是如果送膜電機的一次送膜量不變,那么,隨著裹包速度的增加,實際的送膜長度會越來越短。因此,我們需要增加一個不同裹包速度的送膜補償量。
2.分瓶
分瓶控制在膜包機中,一直都是一個不可忽視的問題,分瓶裝置的分瓶好壞直接會影響后面的裹包速度,從而影響整個生產線的速度。目前,分瓶裝置也有兩種機構采用的較多,一種是使用兩個電機軸,與主電機保持一快一慢的同步關系;另外一種是使用壓板、擋板和進瓶電機軸根據主電機的相位相互配合的啟停。第二種方式的分瓶裝置阻止了倒瓶現象,提高了分瓶速度。
3.入口進瓶與熱通道出瓶
除了送切膜和分瓶,入口進瓶與熱通道出瓶也不能降低控制要求。入口和熱通道分別都應該配置一個變頻器,平穩(wěn)的控制進出瓶的輸送。根據工藝的要求,入口輸送帶與熱通道輸送帶的速度應該和主電機保持一個比例關系。這樣可以保證主電機、入口輸送、分瓶、熱通道輸送作到一個基本同步。入口輸送的快慢控制著瓶之間的松緊,從而對分瓶的好壞產生影響。熱通道輸送的快慢加上溫度的高低也會使裹包后的膜收縮程度不同。因此,前后輸送的同步配合也是一個需要考慮的因素。
彩膜送切的探討
白膜沒有位置的限制,可以從任何一個位置開始,只要保證每次送切的膜長一致就可以。相比之下,彩膜送切的位置與膜長所要求的精度高很多。除了薄膜長度以外,送切后彩膜的圖案對稱度也是一個檢驗的標準。一般地,印制出來的彩膜都會在兩段對稱圖案的后面留有一個空白段,是待切部分。每一個空白待切部分的薄膜邊緣都會有一個黑色的一小塊色標印記(Print)。利用一個光電傳感器可以在送膜過程中捕獲這一個印記,從而讓伺服控制器得到這個信息。工藝上要求,印記一旦被檢測到,送膜電機會完成一段位移,然后開始切膜。如果送膜電機一直以一定的速度運動,那么,切膜電機從檢測到印記與送膜電機同步到最后完成切膜應該是容易控制的。但是,送膜電機仍然需要和主電機保持同步,完成先慢后快的軌跡。當然,勻速送切彩膜方式可以用作第一次的手動校準。因此,本次在科時敏的膜包機中采用了一種動態(tài)控制送膜長度的方法來控制彩膜的送切,達到了一定的工藝要求。其實,彩膜的送切應該還有其他很好的方法值得研究,國外的先進經驗也是值得借鑒的。
結束語
熱收縮薄膜包裝機在整個啤酒生產線中是最后一個環(huán)節(jié),也是影響最終啤酒產量的一個重要因素。國內的啤酒生產廠家也是最近一兩年才開始使用國產的膜包機。因此,無論從機械、電氣,還是到整個系統(tǒng)的控制,都還有一定的有效升級空間。