
數(shù)十年來,大多數(shù)電機(jī)控制應(yīng)用都依賴于可為其實(shí)現(xiàn)低成本與實(shí)施簡(jiǎn)便性的通用有刷 DC 與步進(jìn)電機(jī),。不過,隨著微處理器 (MCU) 架構(gòu)的不斷創(chuàng)新與集成度的不斷提高,,當(dāng)今開發(fā)人員能夠采用更先進(jìn)與更智能的電機(jī)類型與控制機(jī)制,,以極低的成本提高電機(jī)的精度、性能,、電源效率和使用一系列狀態(tài)簡(jiǎn)化控制復(fù)雜性,。所支持的狀態(tài)越多,對(duì)位置的控制精確度就越高,,但這同時(shí)也意味著需要更復(fù)雜的處理過程壽命,。
高級(jí)電機(jī)類型
AC 電感 (ACI) 電機(jī)能很好地滿足各種不同高性能應(yīng)用的需求,其中包括白色家電,、泵,、風(fēng)扇以及壓縮機(jī)等(如冰箱和 HVAC 系統(tǒng))。由于電機(jī)的內(nèi)部定子和轉(zhuǎn)子由可變電流控制且以不同的速度旋轉(zhuǎn),,因而 ACI 電機(jī)采“持續(xù)”的控制方案來提高定位精度,。PMSM 可實(shí)現(xiàn)低噪聲工作和最小轉(zhuǎn)矩,理想適用于需要高精度位置控制,、超高速度和/或極高轉(zhuǎn)矩的應(yīng)用用異步工作模式,。ACI 擁有優(yōu)異的速度與扭矩控制,能夠以較低的成本實(shí)現(xiàn)卓越的穩(wěn)健性,,且在高速情況下具有出色的效率,。ACI 的主要劣勢(shì)在于其需要復(fù)雜的反饋和控制機(jī)制,才能避免速度變化和較低速度時(shí)的效率不受影響,。
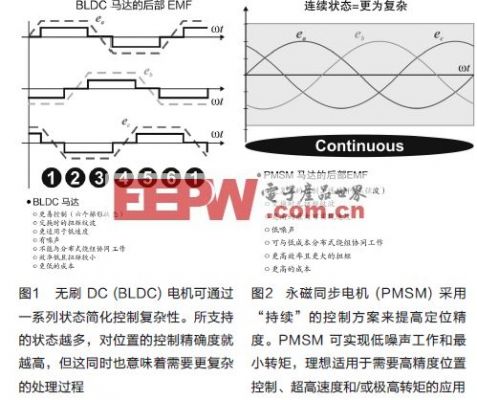
無(wú)刷 DC (BLDC) 電機(jī)采用同步工作模式,,可通過可變電流控制定子磁通量,而定子磁通量則由永磁線圈或電流饋電線圈保持為常量,。同步控制能夠提供非常高的位置精度,,以及更高的電源效率(也就是說,由于磁鐵固有的磁通量,因而驅(qū)動(dòng)電機(jī)所需的電流可以降低),。BLDC 電機(jī)采用一系列狀態(tài)(參見圖 1)對(duì)位置進(jìn)行控制,。所支持的狀態(tài)越多,對(duì)位置的控制精確度就越高,,但這同時(shí)也意味著需要更復(fù)雜的處理過程,。由于 BLDC 為無(wú)刷操作,因而理想適用于維護(hù)和磨損對(duì)總擁有成本影響較大的應(yīng)用領(lǐng)域,。BLDC 是發(fā)展速度最快的一種電機(jī)類型,能針對(duì)中高扭矩實(shí)現(xiàn)高效可靠的操作,,具有高功率密度和可用于易燃環(huán)境等特性,,非常適用于自動(dòng)化、牽引,、精密設(shè)備和白色家電等應(yīng)用,。由于 BLDC 采用簡(jiǎn)單的換向技術(shù),因而這種系統(tǒng)復(fù)雜度較低,、重量較輕,,有助于實(shí)現(xiàn)小尺寸、高效率,、低成本等優(yōu)異特性,,而且在變速及低速情況下均能實(shí)現(xiàn)出色性能。
永磁同步電機(jī) (PMSM) 與 BLDC 電機(jī)的不同之處在于采用了“持續(xù)”的控制方案(參見圖 2),。也就是說,,PMSM 可實(shí)現(xiàn)低噪聲工作、最小的換向轉(zhuǎn)矩紋波,,且能與低成本的分布繞組協(xié)同配合,。其可支持更高的最高可達(dá)速度和更高的效率與轉(zhuǎn)矩,因此非常適用于需要高精度位置控制,、超高速度和/或極高轉(zhuǎn)矩的應(yīng)用,,例如牽引、高精度自動(dòng)化(機(jī)器人)以及混合動(dòng)力/電動(dòng)汽車等,。
智能控制機(jī)制
對(duì)于如何控制不同類型的電機(jī)而言,,開發(fā)人員有許多選擇,具體取決于保持電機(jī)效率的工作范圍(如高/低速度,、高轉(zhuǎn)矩)以及需要多高的精度(如位置,、速度、轉(zhuǎn)矩等),。每一種控制機(jī)制都在成本,、電源效率、精度和性能方面擁有最佳的平衡點(diǎn),。
簡(jiǎn)單的標(biāo)量控制(也稱為 V/f 或單位頻率電壓)是一種用于驅(qū)動(dòng) ACI 電機(jī)的流行方法,,因?yàn)檫@種方法實(shí)施起來簡(jiǎn)單直接,,且其相應(yīng)的處理要求也不高??赏ㄟ^改變用于驅(qū)動(dòng)電機(jī)的正弦波頻率來管理速度,,無(wú)需控制電流或優(yōu)化轉(zhuǎn)矩。但是,,簡(jiǎn)單的標(biāo)量控制在高速和低速情況下轉(zhuǎn)矩效率均較低,,動(dòng)態(tài)性能不佳,對(duì)變化的響應(yīng)遲緩,,對(duì)設(shè)置點(diǎn)產(chǎn)生過沖,,并在低速情況下內(nèi)部電源損耗非常嚴(yán)重。
磁場(chǎng)定向控制 (FOC) 相對(duì)于簡(jiǎn)單標(biāo)量控制而言,,F(xiàn)OC是一種智能化程度更高的控制機(jī)制,,根據(jù)應(yīng)用的不同,其更高的復(fù)雜性能實(shí)現(xiàn)相對(duì)更出色的低成本性和電源效率以及更高的精度和性能,。此外,,F(xiàn)OC 也稱為矢量控制,能在整個(gè)轉(zhuǎn)矩和速度范圍內(nèi)實(shí)現(xiàn)對(duì) ACI 和 PMSM 電機(jī)(表 1)的最佳控制,。FOC 不僅能在最小化轉(zhuǎn)矩紋波的同時(shí)提升起始轉(zhuǎn)矩,,而且還能有效支持所有速度的最大轉(zhuǎn)矩。其可對(duì)變化進(jìn)行快速響應(yīng)并能在滿負(fù)載條件下保持零速,,從而可在整個(gè)電機(jī)速度范圍內(nèi)確保性能穩(wěn)定可靠,。由于 FOC 采用電流控制模式,因而開發(fā)人員可根據(jù)特定應(yīng)用來相應(yīng)優(yōu)化電源轉(zhuǎn)換器電路和電機(jī)大小,。
梯形與正弦控制是 BLDC 電機(jī)控制兩種最主要的選擇,。由于梯形控制比較簡(jiǎn)單且成本較低,因而傳統(tǒng)上一直屬于首選方法,。但是,,為了實(shí)現(xiàn)更順暢的操作、更及時(shí)的轉(zhuǎn)矩響應(yīng)性以及更低的電氣噪聲,,現(xiàn)在許多開發(fā)人員開始轉(zhuǎn)而采用正弦控制方法,。這不僅能提高性能和效率,還能配合分布繞組工作,,且在較高速度條件下也能表現(xiàn)出更強(qiáng)大的控制能力,,從而有助于 OEM 廠商實(shí)現(xiàn)出色的系統(tǒng)差異化。例如,,梯形控制法的 EMI(電磁干擾)較高,,會(huì)造成電機(jī)系統(tǒng)不穩(wěn)定,從而顯著影響性能,同時(shí)還會(huì)加大人耳可覺察的干擾噪音,。
反饋
高級(jí)控制機(jī)制的更高性能和復(fù)雜性從一定程度而言都與反饋環(huán)路的使用有關(guān),。反饋環(huán)路可對(duì)速度、位置/角度,、電流,、磁通量以及轉(zhuǎn)矩進(jìn)行調(diào)節(jié)。FOC 需要測(cè)量速度以及轉(zhuǎn)子與定子之間的角度,。梯形和正弦控制則需要測(cè)量速度,、位置和電流。
開發(fā)人員既能夠采用傳感器也能夠采用無(wú)傳感器方案來實(shí)施反饋,。就采用 ACI 電機(jī)的應(yīng)用而言,,可使用測(cè)速計(jì)直接測(cè)量速度。采用 PMSM 的設(shè)計(jì)方案則可使用編碼器或分解器對(duì)位置進(jìn)行跟蹤,,同時(shí)可通過測(cè)量一定時(shí)間內(nèi)的位置變化來計(jì)算速度。傳感器確實(shí)會(huì)增加系統(tǒng)的成本和組件數(shù)量,,但對(duì)高精度系統(tǒng)來說往往是必需的,。
對(duì)于無(wú)傳感器的方案而言,需要通過滑模 (Sliding Mode) 和模型參考自適應(yīng)系統(tǒng) (MRAS) 等“狀態(tài)觀察器”根據(jù)實(shí)時(shí)電流與電壓的測(cè)量結(jié)果對(duì)電機(jī)的速度和角度進(jìn)行建模(也就是進(jìn)行估算),。這種方法的益處是電流和電壓傳感器比位置傳感器(采用單個(gè) DC 分流就能以低成本的方式對(duì)電流進(jìn)行可靠的測(cè)量)便宜得多,,但實(shí)施數(shù)學(xué)電機(jī)建模工作會(huì)占用系統(tǒng)微處理器一定量的 MIPS 資源。

集成型電機(jī)控制
當(dāng)前片上系統(tǒng)集成的發(fā)展趨勢(shì)改變了開發(fā)人員實(shí)施電機(jī)控制的方式?,F(xiàn)在,,支持智能控制機(jī)制實(shí)施的 MCU 成本還不足 2 美元,即便對(duì)大量低成本應(yīng)用而言也足以接受,,有助于提升性能,、效率和精度。舉例來說,,德州儀器 (TI) 的低成本 C2000 Piccolo MCU 可在單顆芯片上控制兩個(gè)電機(jī),,同時(shí)仍能為功率因數(shù)校正 (PFC) 等其他高價(jià)值特性預(yù)留足夠的性能空間。此外,,這種微處理器還集成了眾多基于硬件的特性,,能夠進(jìn)一步提升性能和效率。
● 加速器:基于硬件的處理能將主 MCU 解放出來,,進(jìn)而加快計(jì)算速度并簡(jiǎn)化整體設(shè)計(jì);例如,,控制律加速器 (CLA) 能完全承擔(dān)起整個(gè)閉環(huán) FOC 系統(tǒng)的處理任務(wù);除了可提升電機(jī)控制的精度之外,加速器還能提供更多的處理預(yù)留性能空間,,使開發(fā)人員能夠通過抽象來簡(jiǎn)化設(shè)計(jì),,實(shí)施更高級(jí)的算法和/或采用成本更低的 MCU。
● 電機(jī)控制專用外設(shè):MCU 上的集成外設(shè)不僅能降低系統(tǒng)成本、提高系統(tǒng)精度,,而且還能加速設(shè)計(jì)進(jìn)程;例如,,高分辨率和已同步的 ADC 能讓 MCU 通過 CPU 獲取來實(shí)現(xiàn) ADC 采樣同步,以執(zhí)行時(shí)延極低的高準(zhǔn)確度電流測(cè)量;基于硬件的可編程 PWM 配合增強(qiáng)型特性不僅能優(yōu)化性能,,還能提升效率,,并確保 ADC 采樣不與 PWM 切換同時(shí)發(fā)生;最后,諸如 CAP/QEP 傳感器接口等集成型接口能夠顯著簡(jiǎn)化設(shè)計(jì)工作,、減少組件數(shù),,并降低系統(tǒng)成本。
● 實(shí)時(shí)調(diào)試支持:電機(jī)控制應(yīng)用面臨的一個(gè)特殊挑戰(zhàn),,就是要在電機(jī)不間斷運(yùn)行的情況下,,持續(xù)提供中斷的同時(shí)進(jìn)行系統(tǒng)調(diào)試;為了實(shí)現(xiàn)這一目標(biāo),需要讓基于硬件的實(shí)時(shí)調(diào)試電路系統(tǒng)幫助開發(fā)人員以非侵入式的方式直接存取內(nèi)部微處理器資源;此外,,基于硬件的調(diào)試還可對(duì)已部署的系統(tǒng)進(jìn)行現(xiàn)場(chǎng)故障排除,。
加速開發(fā)進(jìn)程
獲得設(shè)計(jì)與調(diào)試所需的軟硬件是最大限度加速開發(fā)進(jìn)程的關(guān)鍵。比方說,,通用硬件平臺(tái)能幫助開發(fā)人員實(shí)現(xiàn)設(shè)計(jì)的可擴(kuò)展性,,能針對(duì)不同應(yīng)用實(shí)現(xiàn)軟件的重復(fù)使用,如從簡(jiǎn)單的電機(jī)應(yīng)用直到高端的高精度應(yīng)用等,。此外,,提供豐富電機(jī)控制庫(kù)的可視開發(fā)工具也能進(jìn)一步擴(kuò)展平臺(tái)的價(jià)值,使開發(fā)人員能夠?qū)F(xiàn)有框架進(jìn)行快速調(diào)諧以適用于特定的應(yīng)用領(lǐng)域,,從而實(shí)現(xiàn)高級(jí)別的功能,。
可視開發(fā)工具使開發(fā)人員能夠?qū)F(xiàn)有框架進(jìn)行快速調(diào)諧以適用于特定應(yīng)用,從而實(shí)現(xiàn)高級(jí)別的設(shè)計(jì),。例如雙通道無(wú)傳感器 FOC 式 PMSM 系統(tǒng)的增量構(gòu)建,。在這一點(diǎn)上,開發(fā)人員能夠確認(rèn)目標(biāo)獨(dú)立的模塊,、占空比以及 PWM 更新,。此外,對(duì)電機(jī)表現(xiàn)建模的功能還可幫助開發(fā)人員在電機(jī)斷連時(shí)確認(rèn) PWM 操作,,從而可避免意外熔斷,。
開發(fā)人員通常可通過采用定點(diǎn) MCU 來降低系統(tǒng)成本,,不過代價(jià)是要手動(dòng)管理數(shù)學(xué)精度與分辨率問題,。采用諸如 TI IQMath 等庫(kù)抽象化算法設(shè)計(jì),算法代碼可在 MCU 以及應(yīng)用,、控制機(jī)制與電機(jī)類型之間進(jìn)行移植,。此外,,抽象性還可簡(jiǎn)化第三方電機(jī)控制軟件與開發(fā)平臺(tái)(如 Mathworks 的 Embedded Target 與 Visual Solutions 的 VisSim 等)之間的集成,促進(jìn)代碼重復(fù)使用,,而且即便在浮點(diǎn)與定點(diǎn) MCU 之間也可實(shí)現(xiàn)代碼的“上下”移動(dòng),。
專為電機(jī)控制應(yīng)用設(shè)計(jì)的高集成 MCU 的推出使開發(fā)人員不僅能夠降低現(xiàn)有系統(tǒng)成本,而且還可采用更智能的控制機(jī)制提高系統(tǒng)性能,、精度以及效率,。開發(fā)人員通過了解其可使用的不同電機(jī)類型與控制方法,就可選擇適當(dāng)?shù)姆椒ㄅc控制智能水平來構(gòu)建易于擴(kuò)展的高穩(wěn)健系統(tǒng),,該系統(tǒng)不但支持各種增值特性,,而且還可充分利用長(zhǎng)期的代碼投資。