
光伏發(fā)電系統(tǒng)中光伏電池的輸出特性具有唯一的最大功率點(diǎn)(MPP),需要對(duì)光伏電池的最大功率點(diǎn)進(jìn)行跟蹤(MPPT)。文中分析了幾種常見(jiàn)的最大功率點(diǎn)跟蹤控制方法,對(duì)比分析了它們的優(yōu)缺點(diǎn)。針對(duì)MPPT控制方法中存在的啟動(dòng)特性較差、跟蹤過(guò)程不穩(wěn)定、精度不高等特點(diǎn),采用一種改進(jìn)爬山法,該法以恒定電壓法作為啟動(dòng)特性及采用變步長(zhǎng)進(jìn)行跟蹤控制,并利用Matlab/Simulink搭建了改進(jìn)爬山法的MPPT控制模型,仿真結(jié)果驗(yàn)證該方法的有效性。
面對(duì)日益枯竭的化石能源和不斷惡化的生態(tài)環(huán)境,人類需要進(jìn)行第三次能源結(jié)構(gòu)轉(zhuǎn)換,從礦物能源向可再生能源轉(zhuǎn)換,用可再生能源替代礦物能源,用無(wú)碳能源、低碳能源替代高碳能源。為降低對(duì)傳統(tǒng)能源的依賴,世界對(duì)新型能源的重視越來(lái)越高。太陽(yáng)能是最具潛能的新能源形式之一,其中光伏發(fā)電是太陽(yáng)能利用的有效方式之一。光伏發(fā)電具有許多優(yōu)點(diǎn),如:安全可靠,無(wú)噪聲,無(wú)污染,能量隨處可得,無(wú)需消耗燃料,不受地域限制,規(guī)模大小隨意,無(wú)需架設(shè)輸電線路,可以方便地與建筑物相結(jié)合等,這些優(yōu)點(diǎn)都是常規(guī)發(fā)電和其他發(fā)電方式所不可比擬的。在光伏發(fā)電系統(tǒng)中,要提高系統(tǒng)的整體效率,達(dá)到充分利用太陽(yáng)能資源的目的,一個(gè)重要的途徑就是實(shí)時(shí)調(diào)節(jié)光伏電池的工作點(diǎn),使之工作在最大功率點(diǎn)附近,這一過(guò)程就稱為最大功率點(diǎn)跟蹤。
1 光伏電池模型及輸出特性
1.1 光伏電池的數(shù)學(xué)模型
在光照強(qiáng)度和環(huán)境溫度一定時(shí),光伏電池既非恒壓源,也非恒流源,也不可能為負(fù)載提供任意大的功率,是一種非線性直流電源。其等效電路如圖1所示。圖1中,UJ為PN結(jié)電壓,Id為光伏電池在無(wú)光照時(shí)的飽和電流,Id=Io{EU+IRS) nKT-1}。一個(gè)理想的太陽(yáng)能電池,由于串聯(lián)電阻RS很小,旁路電阻Rsh很大,所以在進(jìn)行理想電路的計(jì)算時(shí),它們均可忽略不計(jì)。由圖1的太陽(yáng)能光伏電池等效電路得出:I=Iph-I0[eq(U+IRS) nKT -1]- U+IR R s sh(1)式中,I為光伏電池輸出電流;I0為PN結(jié)的反向飽和電流;Iph為光生電流;U為光伏電池輸出電壓;q為電子電荷,q=1.6伊10-19 C;k為波爾茲曼常數(shù),k=1.38伊10-23 J/K;T為熱力學(xué)溫度;n為N結(jié)的曲線常數(shù);Rs,Rsh為光伏電池的自身固有電阻。

圖1 光伏電池等效電路
1.2 光伏電池電氣特性
光伏電池的輸出特性主要通過(guò)I-U和P-U特性曲線來(lái)加以體現(xiàn),如圖2所示。
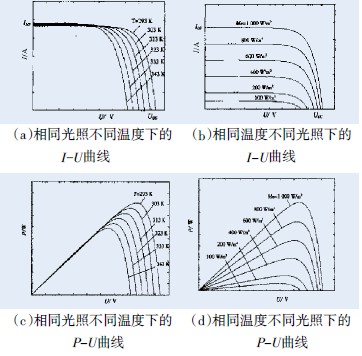
圖2 光伏電池的I-U和P-U特性曲線
從圖2中可以看出,光伏電池的輸出特性曲線與工作環(huán)境的光照、溫度等因素有著密切的關(guān)系,且具有明顯的非線性特性,在一定的光照及溫度條件下,電池具有唯一的最大功率點(diǎn),所以為了實(shí)現(xiàn)光伏發(fā)電系統(tǒng)的輸出功率的最大化,需要對(duì)光伏電池的輸出功率進(jìn)行最大功率點(diǎn)跟蹤。
2 MPPT控制方法的對(duì)比分析
國(guó)內(nèi)外研究MPPT的算法很多,比較成熟的有恒定電壓法、擾動(dòng)觀測(cè)法/爬山法、電導(dǎo)增量法等。恒定電壓法(CVT)就是將光伏電壓固定在最大功率點(diǎn)附近,該控制方法簡(jiǎn)單容易實(shí)現(xiàn),初期投入少,系統(tǒng)工作電壓具有良好的穩(wěn)定性,但是跟蹤精度差,忽略了溫度對(duì)光伏電池開路電壓的影響,測(cè)量開路電壓要求光伏陣列斷開負(fù)載后再測(cè)量,對(duì)外界條件的適應(yīng)性差,環(huán)境變化時(shí)不能自動(dòng)跟蹤到MPP,造成了能量損失。擾動(dòng)觀測(cè)法(P&O)和爬山法(Hill Climbing)都是通過(guò)不斷擾動(dòng)光伏系統(tǒng)的工作點(diǎn)來(lái)尋找最大功率點(diǎn)的方向,該控制方法控制思路簡(jiǎn)單,實(shí)現(xiàn)較為方便,跟蹤效率高,提高太陽(yáng)能的利用效率,但是擾動(dòng)觀測(cè)法或爬山法的步長(zhǎng)是固定的,如果步長(zhǎng)過(guò)小,就會(huì)導(dǎo)致光伏陣列長(zhǎng)時(shí)間地停滯在低功率輸出區(qū),如果步長(zhǎng)過(guò)大,就會(huì)導(dǎo)致系統(tǒng)振蕩加劇,并且在日照強(qiáng)度變化時(shí)會(huì)產(chǎn)生誤判現(xiàn)象。電導(dǎo)增量法是通過(guò)調(diào)整工作點(diǎn)的電壓,使之逐步接近最大功率點(diǎn)電壓來(lái)實(shí)現(xiàn)最大功率點(diǎn)的跟蹤,該方法能夠判斷工作電壓與最大功率點(diǎn)電壓的相對(duì)位置,能夠快速地跟蹤光強(qiáng)迅速變化引起的最大功率點(diǎn)變化,控制效果好,穩(wěn)定度高,但是該控制算法較復(fù)雜,對(duì)控制系統(tǒng)性能和傳感器精度要求較高,硬件實(shí)現(xiàn)難。除以上幾種常用的MPPT控制方法外,目前不斷出現(xiàn)一些較新、較實(shí)用的MPPT算法,如直線近似法、三點(diǎn)重心比較法等。這些算法既參考了已有的比較成熟的方法,又在其基礎(chǔ)上進(jìn)行了改進(jìn)和創(chuàng)新,跟蹤精度有了進(jìn)一步的提高。同時(shí),以模糊控制法、神經(jīng)網(wǎng)絡(luò)控制法等為代表的新算法的出現(xiàn),也為最大功率點(diǎn)跟蹤控制技術(shù)的快速發(fā)展提供了堅(jiān)實(shí)的數(shù)學(xué)基礎(chǔ)和理論依據(jù)。對(duì)于各種MPPT算法優(yōu)缺點(diǎn)的比較分析如表1所示。由以上研究分析發(fā)現(xiàn),每種MPPT控制方法各有其優(yōu)缺點(diǎn),在實(shí)際工作中需要綜合考慮,根據(jù)不同的環(huán)境采用不同的控制方法,既能提高利用效率又能縮小成本。
表1 MPPT控制方法比較

光伏發(fā)電系統(tǒng)中光伏電池的輸出特性具有唯一的最大功率點(diǎn)(MPP),需要對(duì)光伏電池的最大功率點(diǎn)進(jìn)行跟蹤(MPPT)。文中分析了幾種常見(jiàn)的最大功率點(diǎn)跟蹤控制方法,對(duì)比分析了它們的優(yōu)缺點(diǎn)。針對(duì)MPPT控制方法中存在的啟動(dòng)特性較差、跟蹤過(guò)程不穩(wěn)定、精度不高等特點(diǎn),采用一種改進(jìn)爬山法,該法以恒定電壓法作為啟動(dòng)特性及采用變步長(zhǎng)進(jìn)行跟蹤控制,并利用Matlab/Simulink搭建了改進(jìn)爬山法的MPPT控制模型,仿真結(jié)果驗(yàn)證該方法的有效性。
面對(duì)日益枯竭的化石能源和不斷惡化的生態(tài)環(huán)境,人類需要進(jìn)行第三次能源結(jié)構(gòu)轉(zhuǎn)換,從礦物能源向可再生能源轉(zhuǎn)換,用可再生能源替代礦物能源,用無(wú)碳能源、低碳能源替代高碳能源。為降低對(duì)傳統(tǒng)能源的依賴,世界對(duì)新型能源的重視越來(lái)越高。太陽(yáng)能是最具潛能的新能源形式之一,其中光伏發(fā)電是太陽(yáng)能利用的有效方式之一。光伏發(fā)電具有許多優(yōu)點(diǎn),如:安全可靠,無(wú)噪聲,無(wú)污染,能量隨處可得,無(wú)需消耗燃料,不受地域限制,規(guī)模大小隨意,無(wú)需架設(shè)輸電線路,可以方便地與建筑物相結(jié)合等,這些優(yōu)點(diǎn)都是常規(guī)發(fā)電和其他發(fā)電方式所不可比擬的。在光伏發(fā)電系統(tǒng)中,要提高系統(tǒng)的整體效率,達(dá)到充分利用太陽(yáng)能資源的目的,一個(gè)重要的途徑就是實(shí)時(shí)調(diào)節(jié)光伏電池的工作點(diǎn),使之工作在最大功率點(diǎn)附近,這一過(guò)程就稱為最大功率點(diǎn)跟蹤。
1 光伏電池模型及輸出特性
1.1 光伏電池的數(shù)學(xué)模型
在光照強(qiáng)度和環(huán)境溫度一定時(shí),光伏電池既非恒壓源,也非恒流源,也不可能為負(fù)載提供任意大的功率,是一種非線性直流電源。其等效電路如圖1所示。圖1中,UJ為PN結(jié)電壓,Id為光伏電池在無(wú)光照時(shí)的飽和電流,Id=Io{EU+IRS) nKT-1}。一個(gè)理想的太陽(yáng)能電池,由于串聯(lián)電阻RS很小,旁路電阻Rsh很大,所以在進(jìn)行理想電路的計(jì)算時(shí),它們均可忽略不計(jì)。由圖1的太陽(yáng)能光伏電池等效電路得出:I=Iph-I0[eq(U+IRS) nKT -1]- U+IR R s sh(1)式中,I為光伏電池輸出電流;I0為PN結(jié)的反向飽和電流;Iph為光生電流;U為光伏電池輸出電壓;q為電子電荷,q=1.6伊10-19 C;k為波爾茲曼常數(shù),k=1.38伊10-23 J/K;T為熱力學(xué)溫度;n為N結(jié)的曲線常數(shù);Rs,Rsh為光伏電池的自身固有電阻。
圖1 光伏電池等效電路
1.2 光伏電池電氣特性
光伏電池的輸出特性主要通過(guò)I-U和P-U特性曲線來(lái)加以體現(xiàn),如圖2所示。
圖2 光伏電池的I-U和P-U特性曲線
從圖2中可以看出,光伏電池的輸出特性曲線與工作環(huán)境的光照、溫度等因素有著密切的關(guān)系,且具有明顯的非線性特性,在一定的光照及溫度條件下,電池具有唯一的最大功率點(diǎn),所以為了實(shí)現(xiàn)光伏發(fā)電系統(tǒng)的輸出功率的最大化,需要對(duì)光伏電池的輸出功率進(jìn)行最大功率點(diǎn)跟蹤。
2 MPPT控制方法的對(duì)比分析
國(guó)內(nèi)外研究MPPT的算法很多,比較成熟的有恒定電壓法、擾動(dòng)觀測(cè)法/爬山法、電導(dǎo)增量法等。恒定電壓法(CVT)就是將光伏電壓固定在最大功率點(diǎn)附近,該控制方法簡(jiǎn)單容易實(shí)現(xiàn),初期投入少,系統(tǒng)工作電壓具有良好的穩(wěn)定性,但是跟蹤精度差,忽略了溫度對(duì)光伏電池開路電壓的影響,測(cè)量開路電壓要求光伏陣列斷開負(fù)載后再測(cè)量,對(duì)外界條件的適應(yīng)性差,環(huán)境變化時(shí)不能自動(dòng)跟蹤到MPP,造成了能量損失。擾動(dòng)觀測(cè)法(P&O)和爬山法(Hill Climbing)都是通過(guò)不斷擾動(dòng)光伏系統(tǒng)的工作點(diǎn)來(lái)尋找最大功率點(diǎn)的方向,該控制方法控制思路簡(jiǎn)單,實(shí)現(xiàn)較為方便,跟蹤效率高,提高太陽(yáng)能的利用效率,但是擾動(dòng)觀測(cè)法或爬山法的步長(zhǎng)是固定的,如果步長(zhǎng)過(guò)小,就會(huì)導(dǎo)致光伏陣列長(zhǎng)時(shí)間地停滯在低功率輸出區(qū),如果步長(zhǎng)過(guò)大,就會(huì)導(dǎo)致系統(tǒng)振蕩加劇,并且在日照強(qiáng)度變化時(shí)會(huì)產(chǎn)生誤判現(xiàn)象。電導(dǎo)增量法是通過(guò)調(diào)整工作點(diǎn)的電壓,使之逐步接近最大功率點(diǎn)電壓來(lái)實(shí)現(xiàn)最大功率點(diǎn)的跟蹤,該方法能夠判斷工作電壓與最大功率點(diǎn)電壓的相對(duì)位置,能夠快速地跟蹤光強(qiáng)迅速變化引起的最大功率點(diǎn)變化,控制效果好,穩(wěn)定度高,但是該控制算法較復(fù)雜,對(duì)控制系統(tǒng)性能和傳感器精度要求較高,硬件實(shí)現(xiàn)難。除以上幾種常用的MPPT控制方法外,目前不斷出現(xiàn)一些較新、較實(shí)用的MPPT算法,如直線近似法、三點(diǎn)重心比較法等。這些算法既參考了已有的比較成熟的方法,又在其基礎(chǔ)上進(jìn)行了改進(jìn)和創(chuàng)新,跟蹤精度有了進(jìn)一步的提高。同時(shí),以模糊控制法、神經(jīng)網(wǎng)絡(luò)控制法等為代表的新算法的出現(xiàn),也為最大功率點(diǎn)跟蹤控制技術(shù)的快速發(fā)展提供了堅(jiān)實(shí)的數(shù)學(xué)基礎(chǔ)和理論依據(jù)。對(duì)于各種MPPT算法優(yōu)缺點(diǎn)的比較分析如表1所示。由以上研究分析發(fā)現(xiàn),每種MPPT控制方法各有其優(yōu)缺點(diǎn),在實(shí)際工作中需要綜合考慮,根據(jù)不同的環(huán)境采用不同的控制方法,既能提高利用效率又能縮小成本。
表1 MPPT控制方法比較
3 改進(jìn)爬山法研究
考慮到爬山法有較好的跟蹤效率,且實(shí)現(xiàn)簡(jiǎn)單等顯著優(yōu)點(diǎn),本文采用一種改進(jìn)爬山法,該方法采用CVT啟動(dòng)及變步長(zhǎng)的控制策略。CVT啟動(dòng)方法是以0.78倍的開路電壓作為爬山法的運(yùn)行初值,能較好地克服爬山法在啟動(dòng)時(shí)產(chǎn)生的采樣誤差的缺點(diǎn),能提高跟蹤速度。變步長(zhǎng)控制法的思想是:當(dāng)距最大功率點(diǎn)比較遠(yuǎn)時(shí),步長(zhǎng)取較大,跟蹤速度加快;當(dāng)距最大功率點(diǎn)比較近時(shí),步長(zhǎng)取較小,慢慢接近最大功率點(diǎn);當(dāng)非常接近最大功率點(diǎn)時(shí),穩(wěn)定在該點(diǎn)工作。該變步長(zhǎng)法能克服爬山法在最大功率點(diǎn)附近振蕩的缺點(diǎn)。改進(jìn)爬山法控制流程圖如圖3所示。
4 改進(jìn)爬山法仿真分析
光伏發(fā)電系統(tǒng)最大功率點(diǎn)跟蹤器采用Boost

圖3 改進(jìn)爬山法控制流程圖
DC/DC變換電路來(lái)實(shí)現(xiàn),通過(guò)調(diào)節(jié)PWM波的占空比控制功率的輸出。在Boost變換器的電路中串入MPPT控制系統(tǒng),利用Matlab/simulink搭建仿真模型,編寫S函數(shù)作為MPPT的控制模塊,對(duì)光伏電池的最大功率點(diǎn)進(jìn)行追蹤,MPPT仿真模型如圖4所示。

圖4 MPPT仿真模型
對(duì)短路電流3.2 A、開路電壓22 V、最大功率點(diǎn)電流2.94 A和最大功率點(diǎn)電壓17 V的光伏電池模塊組成17伊1的光伏電池陣列進(jìn)行仿真,即其短路電流和光伏電池陣列的開路電壓分別為3.2 V和374 V,光伏電池陣列最大功率點(diǎn)電流和最大功率點(diǎn)電壓分別為2.94 A和289 V。光伏陣列輸入光強(qiáng)為1 000 W/m2,溫度為25 益。為了形成對(duì)比,對(duì)不加MPPT控制器的光伏發(fā)電系統(tǒng)、加爬山法MPPT控制器的光伏發(fā)電系統(tǒng)和加改進(jìn)爬山法MPPT控制器的光伏發(fā)電系統(tǒng)分別進(jìn)行仿真實(shí)驗(yàn),仿真結(jié)果如圖5所示。

圖5 MPPT仿真圖形
由圖5可見(jiàn),未加MPPT控制的光伏電池輸出功率振蕩范圍很大,輸出功率很不穩(wěn)定。爬山法MPPT控制系統(tǒng)能較好地跟蹤到最大功率點(diǎn),但是在最大功率點(diǎn)處還有一定振蕩。改進(jìn)爬山法的MPPT控制系統(tǒng)有效地改善了爬山法的缺點(diǎn),在最大功率點(diǎn)附近振蕩小,跟蹤速度也比較快,提高最大功率跟蹤的效率。
5 結(jié)論
綜上所述,通過(guò)對(duì)幾種常見(jiàn)的MPPT控制方法的比較研究,可以看出,恒定電壓法控制簡(jiǎn)單且易實(shí)現(xiàn),但跟蹤精度差,在外界環(huán)境變化時(shí),會(huì)產(chǎn)生較大誤差;爬山法簡(jiǎn)單實(shí)用、跟蹤效率高,但在最大功率點(diǎn)附近會(huì)發(fā)生振蕩,存在誤差;電導(dǎo)增量法雖然跟蹤快速穩(wěn)定,但由于實(shí)際的光伏發(fā)電系統(tǒng)中電壓和電流的檢測(cè)所依賴的傳感器精度的有限性,采用電導(dǎo)增量法很難達(dá)到預(yù)期的最大功率跟蹤效果。所以本文采用一種改進(jìn)爬山法,并對(duì)其進(jìn)行仿真實(shí)驗(yàn),仿真實(shí)驗(yàn)證明基于變步長(zhǎng)的改進(jìn)爬山法能夠克服爬山法存在的振蕩現(xiàn)象和能量的損失,并且結(jié)合CVT啟動(dòng)能夠更加快速地實(shí)現(xiàn)最大功率點(diǎn)跟蹤。因此改進(jìn)爬山法克服了常規(guī)跟蹤算法中存在的效率低、能量損失大、不穩(wěn)定等的缺點(diǎn),可以很好地適應(yīng)各種場(chǎng)合對(duì)光伏系統(tǒng)MPPT控制的要求,是一種較理想的MPPT控制方案。