
編碼器解碼接口在運動控制卡和伺服驅動器中的應用
中國自動化網(wǎng)
摘要: 在數(shù)控機床或其他數(shù)控設備中,往往都會用到光柵尺或編碼器等位置傳感部件,用以來測量機械運動部件的實際運動位置及速度信息。那么光柵尺或編碼器測量到的數(shù)值,就需要專門的接收部件來處理。一般的編碼器輸出的信號是AB(或ABZ)相正交編碼信號,之所以這樣編碼也是為了將方向信息加入碼流,同時也有利抗干擾等方面的處理。
Abstract:
Key words :
引言
在數(shù)控機床或其他數(shù)控設備中,往往都會用到光柵尺或編碼器等位置傳感部件,用以來測量機械運動部件的實際運動位置及速度信息。那么光柵尺或編碼器測量到的數(shù)值,就需要專門的接收部件來處理。一般的編碼器輸出的信號是AB(或ABZ)相正交編碼信號,之所以這樣編碼也是為了將方向信息加入碼流,同時也有利抗干擾等方面的處理。因此在接收這個信號時就需要專門的解碼接口電路,將所得的數(shù)據(jù)也就是實際運動位置/位置信息傳遞給處理單元,或通過總線(比如 PCI)傳遞給數(shù)控設備的中央控制系統(tǒng)中,讓控制系統(tǒng)的軟硬件根據(jù)測來的實際信息與理想(邏輯)信息進行對比,然后根據(jù)比較的誤差結果再去調節(jié)運動部件的位置和速度,或做其他中斷、開關性的輸出動作以達到控制機械運動的目的。甚至,通過一套完整的算法來把位置、速度、力矩等信息納入體系中來,做實時反饋處理,這也就是我們所說的閉環(huán)(半閉環(huán))處理,我們常見的算法就是PID(或PI)算法。這樣以來,就比較方便于讓機械設備在全自動的運行下達到快、準、柔的特性。
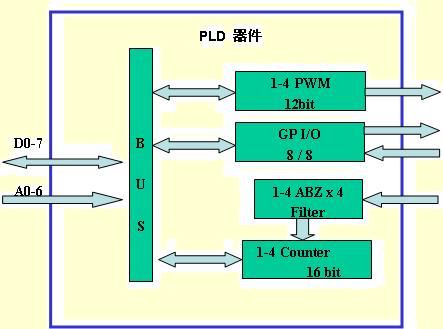
圖1:SM2100功能框圖
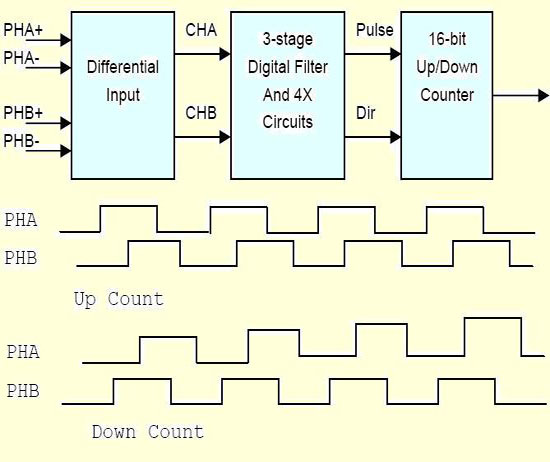
圖2:解碼計數(shù)部分的原理
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權禁止轉載。