
摘要:生活中許多目標(biāo)的高度和水平距離需要進(jìn)行測(cè)量。目前主要的測(cè)量方法,仍以傳統(tǒng)的皮尺丈量為主,測(cè)量效率不高,有時(shí)還很不方便,沒有技術(shù)成熟的數(shù)字式測(cè)高測(cè)距產(chǎn)品。以基本的數(shù)學(xué)方法為理論依據(jù),利用遙控小車做為載體,采用角度傳感器測(cè)量角度、霍爾傳感器測(cè)量水平距離等,通過單片機(jī)LM3S615進(jìn)行數(shù)據(jù)計(jì)算,實(shí)現(xiàn)了對(duì)待測(cè)目標(biāo)物體的高度、水平距離等數(shù)據(jù)的快速、精確和數(shù)字式的測(cè)量,高度測(cè)量精度可達(dá)99.06%,水平測(cè)量精度則可迭98.06%。
關(guān)鍵詞:測(cè)高;測(cè)距;LM3S615;角度傳感器;霍爾傳感器;LCD液晶顯示
目前,國內(nèi)外對(duì)于測(cè)高、測(cè)距的研究主要集中在基于對(duì)衛(wèi)星、雷達(dá)等信號(hào)進(jìn)行的處理,其應(yīng)用范圍主要集中在軍事、海洋或地質(zhì)等數(shù)據(jù)的測(cè)量及勘測(cè)。應(yīng)用于解決日常生活的研究則很少,比如測(cè)量難于用傳統(tǒng)方法測(cè)量的定目標(biāo)高度、水平距離等。即使有研究也主要是采用機(jī)械方法或?qū)鹘y(tǒng)方法進(jìn)行改進(jìn)或修繕。目前發(fā)達(dá)的電子信息科學(xué)技術(shù),給這些日常生活中的高度和距離測(cè)量,提供了新的思路和解決方案。本設(shè)計(jì)將利用遙控小車做為測(cè)量工具,分別采用角度傳感器、霍爾傳感器等傳感器來獲得測(cè)量物理數(shù)據(jù)并通過單片機(jī)進(jìn)行數(shù)據(jù)處理及計(jì)算,從而實(shí)現(xiàn)對(duì)待測(cè)目標(biāo)物體的高度、水平距離等數(shù)據(jù)的快速、精確和數(shù)字式的測(cè)量。
1 理論分析與計(jì)算
1.1 設(shè)計(jì)原理分析及計(jì)算
小車自動(dòng)測(cè)高測(cè)距的過程及相關(guān)參數(shù)如圖1所示。當(dāng)小車停放在A點(diǎn)時(shí),遙控小車的裝置調(diào)整角度,使測(cè)量光點(diǎn)定點(diǎn)到C點(diǎn),測(cè)量并存儲(chǔ)此時(shí)的角度α;之后,遙控控制小車前進(jìn),使小車沿直線行進(jìn)到達(dá)B點(diǎn),并再次調(diào)整測(cè)量裝置,使測(cè)量光點(diǎn)再次定點(diǎn)到C點(diǎn),并測(cè)量記錄此時(shí)的角度β。并對(duì)從A到B的行進(jìn)距離L進(jìn)行測(cè)量和記錄。利用以上數(shù)據(jù),就可以計(jì)算出待測(cè)目標(biāo)的高度H及小車距離待測(cè)目標(biāo)的距離S,計(jì)算式如下式(1)所示。

![]()
1.2 系統(tǒng)設(shè)計(jì)思想
從測(cè)量過程看,需要進(jìn)行測(cè)量的數(shù)據(jù)有角度α、角度β和小車行進(jìn)距離L。通過對(duì)器件的反復(fù)比較,在本設(shè)計(jì)中,采用安裝在舵機(jī)上的激光光源作為定點(diǎn)C點(diǎn)的裝置;采用角度傳感器來進(jìn)行角度的測(cè)量;采用霍爾傳感器作為距離測(cè)量的傳感器;采用單片機(jī)作為主要控制單元,來控制小車直線行進(jìn)、舵機(jī)轉(zhuǎn)動(dòng)定點(diǎn)、角度及距離數(shù)據(jù)的獲取和計(jì)算及測(cè)量數(shù)據(jù)的LCD顯示等。
2 系統(tǒng)設(shè)計(jì)
1)總體設(shè)計(jì)方案 通過以上分析,可將系統(tǒng)分為5部分:角度檢測(cè)模塊、水平距離檢測(cè)模塊和遙控控制模塊、LCD液晶顯示模塊、信號(hào)處理以及控制模塊。系統(tǒng)框圖如圖2所示。

總體設(shè)計(jì)方案為LM3S615處理器通過角度傳感器,采集第1次角度傳感器測(cè)量信號(hào)并存儲(chǔ),遙控控制小車并調(diào)節(jié)角度通過一段距離,采集第2次角度傳感器測(cè)量信號(hào),同時(shí)利用霍爾傳感器對(duì)兩次測(cè)量間的小車行進(jìn)距離進(jìn)行測(cè)量,最終通過LM3S615處理器通過算法公式得出具體高度并送入LCD12864液晶顯示模塊進(jìn)行顯示。
2)角度信號(hào)檢測(cè)方案設(shè)計(jì) 本設(shè)計(jì)采用巨磁電阻角度傳感器,它是利用巨磁電阻在一定的磁場(chǎng)下電阻值急劇減小這一特性開發(fā)的角度測(cè)量傳感器。它具有線性好、線性范圍寬、體積小、靈敏度高(分辨率可以達(dá)到12位,精度達(dá)到10位,最低分辨率為0.01度)、響應(yīng)頻率高等一系列的優(yōu)點(diǎn)。缺點(diǎn)是成本較高。
3)水平距離檢測(cè)方案設(shè)計(jì) 本設(shè)計(jì)采用霍爾傳感器計(jì)數(shù)的方法進(jìn)行水平距離測(cè)量,它具有體積小、靈敏度高等優(yōu)點(diǎn),而且集成化的霍爾傳感器在感應(yīng)到磁場(chǎng)變化時(shí),會(huì)有一個(gè)數(shù)字量的高低電平跳變的特性,可以利用這個(gè)特性達(dá)到計(jì)數(shù)的目的。
4)控制器模塊設(shè)計(jì) 采用LM3S615ARM作為控制器,Luminary Micro StellarisTM系列的微控制器是首款基于ARM Cortex-M3的控制器,它將高性能的32位計(jì)算引入到對(duì)價(jià)格敏感的嵌入式微控制器應(yīng)用中。考慮到精度以及運(yùn)行速度要求不太高等諸多因素,決定采用LM3S168ARM作為本設(shè)計(jì)的處理器模塊。
3 系統(tǒng)實(shí)現(xiàn)
本系統(tǒng)共包含電源、角度數(shù)據(jù)信號(hào)采集、距離數(shù)據(jù)信號(hào)采集、遙控控制、數(shù)據(jù)信號(hào)控制、數(shù)據(jù)信號(hào)顯示6個(gè)主要模塊。具體介紹如下。
1)控制部分電路設(shè)計(jì) 控制部分必須完成紅外控制部分軟件解碼功能、電機(jī)運(yùn)行控制功能、舵機(jī)控制功能、霍爾傳感器計(jì)數(shù)功能、激光器控制、角度傳感器數(shù)據(jù)采集功能以及LCD控制。控制部分電路如下圖3所示。

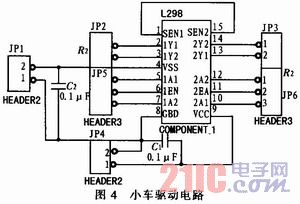
2)驅(qū)動(dòng)電路 本車采用原車自帶的雙直流減速電機(jī),74V就能很好的工作。電機(jī)驅(qū)動(dòng)選用專用驅(qū)動(dòng)芯片L298N,該芯片分別獨(dú)立控制兩路電機(jī)的起停和轉(zhuǎn)向,保證兩路電路的參數(shù)的對(duì)稱,有利于保持小車行駛的穩(wěn)定性和精確性,也降低了電路的設(shè)計(jì)難度。電機(jī)驅(qū)動(dòng)電路如圖4所示。
4 系統(tǒng)軟件設(shè)計(jì)
本系統(tǒng)采用LM3S615ARM作為控制芯片,通過紅外遙控控制小車水平行走,調(diào)節(jié)角度傳感器采集數(shù)據(jù),每次測(cè)量一組數(shù)據(jù)將角度數(shù)據(jù)和水平行駛距離存儲(chǔ)并等待下一次操作。程序流程圖如圖5所示。

5 系統(tǒng)調(diào)試與測(cè)試
5.1 系統(tǒng)調(diào)試
1)舵機(jī)調(diào)試 將舵機(jī)、角度傳感器和激光器安裝好。安裝舵機(jī)時(shí)必須保證舵機(jī)能順時(shí)針旋轉(zhuǎn)90°以上,激光器與小車水平,角度傳感器的輸出電壓小于2 V。
2)小車速度控制 為使小車能走直線,系統(tǒng)使用了兩個(gè)PWM端口控制小車的左右輪速度,將其PWM占空比設(shè)為相同,然后測(cè)試修改占空比直至小車能走直線。
3)紅外軟件解碼 紅外編碼采用了脈沖位置調(diào)制方式(PPM),利用脈沖之間的時(shí)間間隔來區(qū)分“0”和“1”。調(diào)試時(shí)通過改變碼字所對(duì)應(yīng)的時(shí)間,直至能接收到正確的數(shù)據(jù)。
5.2 測(cè)試結(jié)果和結(jié)果分析
5.2.1 測(cè)試結(jié)果
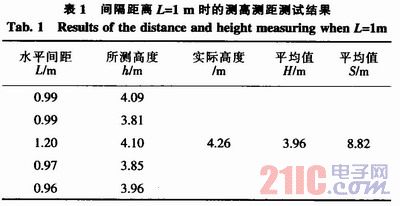
1)離被測(cè)點(diǎn)水平距離9.26 m,以L=1 m為差值不斷前進(jìn),測(cè)同一點(diǎn)高度,記錄如表1所示。
2)離被測(cè)點(diǎn)水平距離9.26 m,以L=2 m為差值不斷前進(jìn),測(cè)同一點(diǎn)高度記錄,如表2所示。

3)離被測(cè)點(diǎn)水平距離9.26 m,以L=3 m為差值不斷前進(jìn),測(cè)同一點(diǎn)高度記錄,如下表3所示。

5.2.2 結(jié)果分析
從以上3表的測(cè)量結(jié)果來看其整體測(cè)量平均值為H=(3.96+4.11+4.22)/≈4.10 m,其絕對(duì)誤差約為16 cm,測(cè)量精度為96.24%。同時(shí)從3表可以看出隨著水平間距的增大其誤差漸漸變小,因此說明角α,β差值越大測(cè)量越精確,高度測(cè)量的最高精度可99.06%,水平距離最高精度可達(dá)98.06%。
6 結(jié)論
本產(chǎn)品基本上達(dá)到了設(shè)計(jì)要求的精度,在選擇好適當(dāng)?shù)牟竭M(jìn)參數(shù)時(shí),高度測(cè)量精度可達(dá)99.06%,水平距離精度可達(dá)98.06%,相對(duì)傳統(tǒng)的測(cè)量方法更加簡單直觀;進(jìn)行一些改裝就能應(yīng)用于實(shí)際生活中,可減少對(duì)目標(biāo)物體的高度和水平距離的測(cè)量時(shí)間和提高測(cè)量精度,具有很高的經(jīng)濟(jì)價(jià)值。