
CTSC-200系列PLC在多層立體車庫(kù)中的應(yīng)用
中國(guó)自動(dòng)化網(wǎng)
摘要: 隨著汽車的急增致使城市停車難問(wèn)題不斷惡化,這時(shí)作為向空間、向高層發(fā)展的占地面積少、停車率高、布置靈活的自動(dòng)化立體停車設(shè)備應(yīng)需而生,有效的解決城市停車難的問(wèn)題。
Abstract:
Key words :
一、概述
隨著汽車的急增致使城市停車難問(wèn)題不斷惡化,這時(shí)作為向空間、向高層發(fā)展的占地面積少、停車率高、布置靈活的自動(dòng)化立體停車設(shè)備應(yīng)需而生,有效的解決城市停車難的問(wèn)題。
目前市面上常見(jiàn)的機(jī)械式立體停車庫(kù)有:升降橫移類、垂直循環(huán)類、巷道堆垛類、多層循環(huán)類、垂直升降類、水平循環(huán)類、平面移動(dòng)類和簡(jiǎn)易升降類等8種,其中升降橫移類以其結(jié)構(gòu)簡(jiǎn)單、操作方便、安全可靠、造價(jià)低等優(yōu)點(diǎn),成為國(guó)內(nèi)車庫(kù)市場(chǎng)發(fā)展的趨勢(shì)。
二、系統(tǒng)結(jié)構(gòu)及工作原理
升降橫移類機(jī)械停車庫(kù)利用托盤移位產(chǎn)生垂直通道,實(shí)現(xiàn)高層車位升降存取車輛。其車位結(jié)構(gòu)為2維矩陣形式,可設(shè)計(jì)為多層和多列。由于受收鏈裝置及進(jìn)出車時(shí)間的限制,一般為2~4層,2層、3層者居多,現(xiàn)以典型的地上3×3升降橫移式為例,說(shuō)明停車庫(kù)的運(yùn)行原理。

此立體車庫(kù)運(yùn)行原理是:底層只能平移,頂層只能升降,中間層既可平移又可升降。除頂層外,中間層和底層都必須預(yù)留一個(gè)空車位,供進(jìn)出車升降之用。當(dāng)?shù)讓榆囄贿M(jìn)出車時(shí),無(wú)需移動(dòng)其他托盤就可直接進(jìn)出車;中間層、頂層進(jìn)出車時(shí),先要判斷其對(duì)應(yīng)的下方位置是否為空,不為空時(shí)要進(jìn)行相應(yīng)的平移處理,直到下方為空才可進(jìn)行下降動(dòng)作,進(jìn)出車完成后再上升回到原位置。其運(yùn)動(dòng)的總原則是:升降復(fù)位,平移不復(fù)位。
三、電氣系統(tǒng)控制方案
車庫(kù)控制方式分為3級(jí)——手動(dòng)、半自動(dòng)和全自動(dòng)。手動(dòng)是在現(xiàn)場(chǎng)用手操作器對(duì)每個(gè)托板進(jìn)行點(diǎn)動(dòng)控制,應(yīng)用于車庫(kù)檢修、突然停電、緊急停機(jī)和車庫(kù)故障4種情況;半自動(dòng)為通過(guò)觸摸屏上的按鈕由PLC實(shí)現(xiàn)自動(dòng)邏輯控制;全自動(dòng)是由計(jì)算機(jī)給出存取命令由PLC來(lái)執(zhí)行任務(wù)(要求配備“操作器”)。其中,手動(dòng)方式為最高優(yōu)先級(jí),而半自動(dòng)或全自動(dòng)方式用于正常進(jìn)出車處理,其中半自動(dòng)方式優(yōu)先級(jí)高于全自動(dòng)。在計(jì)算機(jī)脫機(jī)情況下,PLC控制面板可以完成所有存取車操作,而且本設(shè)計(jì)要求手動(dòng)、半自動(dòng)、全自動(dòng)之間必須能夠互鎖。
控制框圖如下:
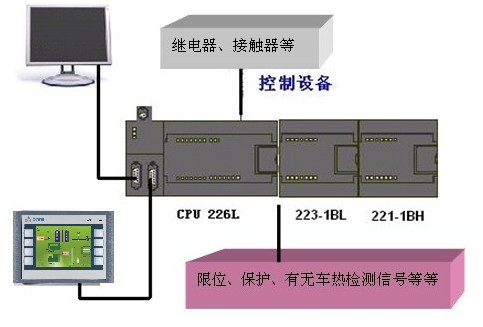
計(jì)算機(jī)連接到控制室,觸摸屏安裝在車庫(kù)現(xiàn)場(chǎng)。
立體車庫(kù)的電氣系統(tǒng)需要監(jiān)視和控制的數(shù)字量點(diǎn)數(shù)非常多,尤其是一些車位比較多的大型立體車。
四、應(yīng)用總結(jié)
CTSC-200PLC有自身帶40點(diǎn)的I/O輸入輸出,還可擴(kuò)展7個(gè)模塊,最大可達(dá)到256點(diǎn)的數(shù)字量I/O點(diǎn)數(shù),可實(shí)現(xiàn)大型立體車庫(kù)的控制需求。
CO-TRUST CTSC-200系列通過(guò)各種抗干擾測(cè)試和嚴(yán)格的工業(yè)環(huán)境測(cè)試,其穩(wěn)定、可靠的性能,加上編程軟件的豐富指令,實(shí)現(xiàn)軟件的優(yōu)化設(shè)計(jì),縮短進(jìn)出車的時(shí)間,大大提高了系統(tǒng)的性能和工作效率。
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。