
基于最新版NI LabVIEW圖形化系統(tǒng)設(shè)計(jì)軟件,LabVIEW Robotics 環(huán)境繼續(xù)提供工業(yè)級(jí)系統(tǒng)設(shè)計(jì)軟件的能力。結(jié)合LabVIEW Robotics與LabVIEW 2010,新的編譯器技術(shù)和優(yōu)化得以實(shí)現(xiàn),您可以自動(dòng)受益于20倍的平均運(yùn)行時(shí)間性能的提升。諸如導(dǎo)航,定位和視覺(jué)處理等計(jì)算密集型算法將可以更快地實(shí)現(xiàn),提高您的機(jī)器人的性能。
感知
傳感器驅(qū)動(dòng)對(duì)任何自主或半自主的系統(tǒng)來(lái)說(shuō)都是是至關(guān)重要的,并且其設(shè)計(jì)和維護(hù)的繁瑣過(guò)程常常會(huì)浪費(fèi)很多設(shè)計(jì)時(shí)間。為了開(kāi)發(fā)LabVIEW Robotics模塊,NI復(fù)用了 很多高效的和可維護(hù)的方法來(lái)實(shí)現(xiàn)機(jī)器人傳感器驅(qū)動(dòng)的發(fā)展。新的驅(qū)動(dòng)程序包括以下內(nèi)容:
•Vishay TEMT6000X01環(huán)境光傳感器
•Maxon電機(jī)編碼器
•Devantech SRF02聲納測(cè)距儀驅(qū)動(dòng)
•Devantech TPA81熱傳感器驅(qū)動(dòng)
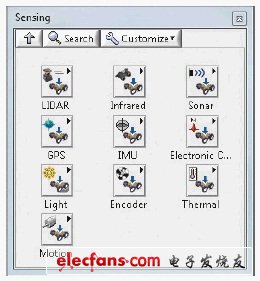
圖1. LabVIEW Robotics 2010模塊提供了一系列傳感器驅(qū)動(dòng),可方便地連接到任何您需要的傳感器,以節(jié)省您寶貴的系統(tǒng)整合和驅(qū)動(dòng)程序開(kāi)發(fā)時(shí)間
思考
一旦您的機(jī)器人可以通過(guò)傳感器的數(shù)據(jù)來(lái)得到一個(gè)可視化的環(huán)境,它需要確定性決策算法,以完成一項(xiàng)任務(wù)或行為。算法設(shè)計(jì)是LabVIEW Robotics軟件的所在,它可以幫助您更加快速地設(shè)計(jì)一個(gè)自主系統(tǒng)。您可以打開(kāi)和修改諸如A*算法或卡爾曼過(guò)濾器等基本算法來(lái)使他們最適合您的應(yīng)用需求。您可以在說(shuō)明書(shū)或網(wǎng)上找到以下新算法的改進(jìn)在和示例程序:
•光學(xué)字符識(shí)別
•阿克曼轉(zhuǎn)向
•基于柵格地圖的A*搜索算法
•基于視覺(jué)避障功能的LabVIEW機(jī)器人起步包
•遙控操作模式的LabVIEW機(jī)器人起步包
圖2. 機(jī)器人社區(qū)既是一個(gè)提供最新傳感器驅(qū)動(dòng)和范例程序的家園,又是一個(gè)分享代碼和創(chuàng)意的論壇
運(yùn)動(dòng)
一旦您的機(jī)器人系統(tǒng)已經(jīng)做出了如何應(yīng)對(duì)其環(huán)境的決定,它需要與馬達(dá)或其他類型的促動(dòng)器通信來(lái)開(kāi)始動(dòng)作。 LabVIEW機(jī)器人2010包含以下新的支持多種的運(yùn)動(dòng)的促動(dòng)器驅(qū)動(dòng),可以應(yīng)用在從地面車輛到昆蟲(chóng)型和人型機(jī)器人很大的范圍內(nèi):
•Dynamixel智能伺服電機(jī)
•Lynxmotion SSC -32伺服控制器
•德州儀器的裝有CAN總線的MDL- BDC24有刷直流電機(jī)控制模塊
NI提供了LabVIEW機(jī)器人社區(qū)來(lái)回答您的問(wèn)題,使您得到有用的參考設(shè)計(jì)。在這里,您可以與您的同行更方便地共享算法和應(yīng)用程序。