
一、汽車轉(zhuǎn)向系功能要求與其相應(yīng)機(jī)構(gòu)的分析
汽車轉(zhuǎn)向系統(tǒng)" title="轉(zhuǎn)向系統(tǒng)">轉(zhuǎn)向系統(tǒng)性能很大程度地決定了對汽車操縱的輕便舒適性和安全行駛的穩(wěn)定平順性,也是減少交通事故和提高道路通行能力的重要因素。隨著現(xiàn)代汽車及其相關(guān)技術(shù)的發(fā)展,對汽車轉(zhuǎn)向系統(tǒng)的功能提出了越來越高的要求,現(xiàn)結(jié)合其相應(yīng)機(jī)構(gòu)的運行原理分析如下:
1.對轉(zhuǎn)向盤的操縱要求即輕便靈活又有穩(wěn)定的操作感受
由于車輪轉(zhuǎn)向時輪胎與地面的摩擦阻尼隨車速降低而增大。即在汽車低速轉(zhuǎn)向時,對無助力傳統(tǒng)機(jī)械轉(zhuǎn)向系的方向盤操縱會相當(dāng)費力,為此目前基本已均采用了動力轉(zhuǎn)向系。并對轉(zhuǎn)向助力的控制要求隨車速增加而減小。而在車速很高時由于方向盤的轉(zhuǎn)動力會很輕,為避免對轉(zhuǎn)向盤微小的干擾力而引起汽車偏離方向,削減因路面不平撞擊轉(zhuǎn)向輪的沖擊傳到轉(zhuǎn)向盤而造成“打手”現(xiàn)象,并在轉(zhuǎn)向結(jié)束時轉(zhuǎn)向盤能有自動回正功能使汽車保持穩(wěn)定直線行駛,使駕駛員通過轉(zhuǎn)向盤對轉(zhuǎn)向過程中車輪與地面之間的運動狀況能始終保持適當(dāng)?shù)?ldquo;路感”,在汽車高速行駛時又希望能對轉(zhuǎn)向系統(tǒng)有一種“反向”助力,即適當(dāng)增加轉(zhuǎn)向系的阻尼。
2.對轉(zhuǎn)向操控有較高的靈敏性并能簡化其結(jié)構(gòu)以減小能耗
對轉(zhuǎn)向系操縱時要求車輪快速響應(yīng)使車身能及時轉(zhuǎn)向。這除了盡可能減小轉(zhuǎn)向系各傳動機(jī)構(gòu)的空行程間隙外,還要求用于轉(zhuǎn)向助力的動力控制裝置響應(yīng)快。目前所用的動力轉(zhuǎn)向系統(tǒng)主要有液壓、氣壓和電動三種,前兩種存在能耗大、響應(yīng)慢等缺點。雖然液壓助力轉(zhuǎn)向系統(tǒng)是目前傳統(tǒng)汽車較為普遍采用的裝置。但隨電動汽車的發(fā)展,以及按各相關(guān)控制的特點[1],需采用電子控制電動助力轉(zhuǎn)向系統(tǒng)(EPS,Electric Power Steering)較為合適。由于省去了液壓動力轉(zhuǎn)向系所須的常運轉(zhuǎn)油泵、儲油罐、管路等,電機(jī)只在需轉(zhuǎn)向期間才接通電源轉(zhuǎn)動,即降低了能耗又使結(jié)構(gòu)緊湊減輕車載自重,并不必補(bǔ)充油液和擔(dān)心漏油等,使工作更可靠。這對車載能源不富裕的純電動汽車尤為適用。而現(xiàn)有電動助力轉(zhuǎn)向系統(tǒng)EPS采用的是旋轉(zhuǎn)電動機(jī),需經(jīng)電磁離合器、齒輪減速傳動等機(jī)械機(jī)構(gòu),還存在機(jī)構(gòu)龐雜,占用空間大,響應(yīng)速度較慢等缺點。根據(jù)轉(zhuǎn)向機(jī)構(gòu)最終帶動轉(zhuǎn)向節(jié)臂的橫拉桿均為左右直線運動等特點,為此本文提出用直線步進(jìn)電機(jī)直接帶動左右橫拉桿,使控制更直接,動態(tài)響應(yīng)更快。
3.要求轉(zhuǎn)向車輪的運動規(guī)律正確穩(wěn)定
即要求內(nèi)、外側(cè)轉(zhuǎn)向輪的偏轉(zhuǎn)角以及驅(qū)動輪的差速比正確穩(wěn)定,兩者的比值與轉(zhuǎn)向盤的轉(zhuǎn)角始終保持一定的關(guān)系,以確保在轉(zhuǎn)向時各個車輪只有滾動而無滑動現(xiàn)象。通過對汽車轉(zhuǎn)向時其內(nèi)、外側(cè)轉(zhuǎn)向輪和驅(qū)動輪的運動過程分析,為保證各車輪只滾動無滑動,要求四車輪均應(yīng)繞同一圓心轉(zhuǎn)動。設(shè)L為汽車軸距,B為汽車輪距,α、β分別為外、內(nèi)側(cè)轉(zhuǎn)向輪的偏轉(zhuǎn)角,則要求車輪作純滾動條件為: 。說明了外轉(zhuǎn)向輪偏轉(zhuǎn)角ɑ須小于內(nèi)轉(zhuǎn)向輪偏轉(zhuǎn)角β,并同時要求內(nèi)、外側(cè)驅(qū)動輪還需滿足相應(yīng)的差速條件[2]。為滿足內(nèi)、外側(cè)轉(zhuǎn)向輪的偏轉(zhuǎn)角要求,需使其轉(zhuǎn)向機(jī)構(gòu)的左、右橫拉桿與轉(zhuǎn)向節(jié)臂成相應(yīng)角度的梯形即非平行四邊形關(guān)系,這也是各類轉(zhuǎn)向系普遍采用的基本方法。為滿足驅(qū)動輪差速要求有采用機(jī)械差速和電子差速兩種。機(jī)械差速是傳統(tǒng)汽車普遍采用的方法,其機(jī)構(gòu)龐大而復(fù)雜。而電子差速系統(tǒng)EDS是采用電子控制來實現(xiàn),有諸多優(yōu)點,隨電動汽車的發(fā)展,特別是輪轂電機(jī)的應(yīng)用,它將是汽車驅(qū)動輪差速控制的發(fā)展方向。
4.有相應(yīng)的安全可靠性
當(dāng)汽車發(fā)生碰撞時,轉(zhuǎn)向盤等裝置應(yīng)能減輕或避免對駕駛員的傷害。而當(dāng)動力轉(zhuǎn)向系統(tǒng)失效或發(fā)生故障時,應(yīng)能保證通過人力轉(zhuǎn)向仍能進(jìn)行轉(zhuǎn)向操縱。
5.盡可能減小轉(zhuǎn)彎半徑和提高高速轉(zhuǎn)向時的穩(wěn)定性
為減小低速轉(zhuǎn)向時的轉(zhuǎn)彎半徑,便于低速選位停車或窄道轉(zhuǎn)向行駛;以及改善高速轉(zhuǎn)向或在側(cè)向風(fēng)作用時的行駛穩(wěn)定性,還需采用高性能的四輪轉(zhuǎn)向[2]來滿足。
通過上述分析,根據(jù)轉(zhuǎn)向機(jī)構(gòu)最終帶動轉(zhuǎn)向節(jié)臂的橫拉桿均為左右直線運動等特點,為提高轉(zhuǎn)向系的快速響應(yīng)性和滿足在不同車速下有相應(yīng)的助力等功能要求,在此特提出用直線步進(jìn)電機(jī)直接帶動左右橫拉桿的兩種汽車轉(zhuǎn)向系統(tǒng)控制機(jī)構(gòu)。為說明其轉(zhuǎn)向系的結(jié)構(gòu)原理,還得對直線控制電機(jī)" title="直線控制電機(jī)">直線控制電機(jī)先作必要說明。
二、直線控制電機(jī)簡介
所謂直線電動機(jī)其實就是把旋轉(zhuǎn)電動機(jī)沿徑向剖開拉直演變而成,它是由電能直接轉(zhuǎn)換成直線機(jī)械運動的一種推力裝置。就控制理論來說直線電動機(jī)用于直線位移機(jī)構(gòu),將使控制變得更直接,動態(tài)響應(yīng)更快,并且由于省去許多機(jī)械傳動件,使其機(jī)械結(jié)構(gòu)更簡捷,消除了機(jī)械間隙,有利于提高精度、傳動剛度、能量轉(zhuǎn)換效率以及降低噪聲等。為提高數(shù)控伺服系統(tǒng)的控制精度和快速響應(yīng)性,作者早在1986年就提出了用恒溫直線電機(jī)驅(qū)動的數(shù)控伺服裝置的發(fā)明專利[3]。而相隔十幾年后,用直線電機(jī)驅(qū)動的各類超高速精密數(shù)控機(jī)床[4]就開始不斷涌現(xiàn),如在1996年芝加哥國際制造技術(shù)博覽會(IMTS-96’)等先后展出,世界行內(nèi)專家把該類機(jī)床稱為“下一代新機(jī)床”。
從直線電機(jī)的工作原理來講,它與旋轉(zhuǎn)電機(jī)一樣,同樣也有直流、交流、步進(jìn)、永磁等類型。而從結(jié)構(gòu)來講,它又有動圈式、動鐵式、平板型、圓筒型等多種形式,即直線電機(jī)可演變生化出比旋轉(zhuǎn)電機(jī)更多的種類。大到磁懸浮列車、直線打樁機(jī)……小到遙控電動窗簾、繪圖儀位移機(jī)構(gòu)等各種技術(shù)領(lǐng)域都可有其應(yīng)用實例。并且電機(jī)的結(jié)構(gòu)形式可按其應(yīng)用機(jī)構(gòu)的需要來選擇更適應(yīng)的方案。隨著現(xiàn)代電機(jī)直接轉(zhuǎn)矩控制技術(shù)、機(jī)電一體化及相關(guān)技術(shù)的不斷發(fā)展完善,將使直線電機(jī)的應(yīng)用領(lǐng)域越來越廣泛。多種技術(shù)相互交叉、滲透、融為一體地應(yīng)用于某一領(lǐng)域,是當(dāng)今技術(shù)發(fā)展的重要趨勢之一。
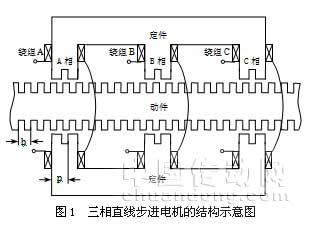
如圖1所示為三相直線步進(jìn)電機(jī)的結(jié)構(gòu)示意圖。直線電機(jī)的動件、定件相當(dāng)于旋轉(zhuǎn)電機(jī)的轉(zhuǎn)子、定子。動、定件上均開有如圖所示的齒槽,并用硅鋼片沖制疊壓而成。動件、定件的齒距須滿足一定的關(guān)系式,設(shè)電機(jī)相數(shù)為m,動件齒距為b,則定件的齒距p=(k+1/m)b,k為任意正整數(shù)。為電機(jī)繞組引線方便,通常做成動鐵式,即帶繞組線圈的為定件,它固定在電機(jī)外殼上,而動件可采用直線滾動導(dǎo)軌來上下固定,使其能左右移動,也可直接與被驅(qū)動進(jìn)行直線位移的機(jī)械部件相連。電機(jī)的外形根據(jù)需要可做成長矩形或圓筒形等多種形式。步進(jìn)電機(jī)是按變磁阻原理運行,即遵循“磁阻最小原理”——磁通總是要沿磁阻最小的路徑閉合。如在圖中所示動件相對定件的位置時,給A相繞組通電勵磁,則A相磁極所產(chǎn)生的磁場力就會力求使磁路磁阻減少,即對動件產(chǎn)生向右移的磁拉力,使得動件的凸極齒盡可能多地與A相磁極的凸齒對齊,于是動件在其磁拉力的作用下向右移動了1/3動件齒距b(即圖示C相與動件齒對齊的位置)。如果依次輪流對A→B→C三相繞組通電,則動件向右位移;而通電順序為B→A→C時,動件就向左位移。按制造工藝及精度使動件的齒距做得越小,則每一脈沖的位移量(脈沖當(dāng)量)就越小。以上描述的是三相單三拍通電方式,實際使用時一般采用三相六拍或三相雙三拍通電方式,三相六拍通電順序為:A→AB→B→BC→C→CA→A;三相雙三拍通電順序為:AB→BC→CA→AB。三相六拍的脈沖當(dāng)量比三相三拍小一半。
三、用直線步進(jìn)電機(jī)控制的汽車轉(zhuǎn)向系統(tǒng)結(jié)構(gòu)原理
用直線步進(jìn)電機(jī)控制的轉(zhuǎn)向系統(tǒng)是在前述所提到的電子控制電動助力轉(zhuǎn)向系統(tǒng)EPS[1]基礎(chǔ)上進(jìn)一步改進(jìn)而成,即用直線步進(jìn)電機(jī)來替代EPS用旋轉(zhuǎn)電機(jī)對轉(zhuǎn)向器中齒條的助力,省去了電磁離合器、減速機(jī)構(gòu)及其傳動件,使其結(jié)構(gòu)更緊湊、控制更直接、響應(yīng)更快。也為更方便地實施高性能的四輪轉(zhuǎn)向(4WS)機(jī)構(gòu),在此提出兩種結(jié)構(gòu):由直線步進(jìn)電機(jī)控制轉(zhuǎn)向助力的系統(tǒng)可用于傳統(tǒng)二輪轉(zhuǎn)向(2WS)系統(tǒng)或四輪轉(zhuǎn)向(4WS)的前輪轉(zhuǎn)向機(jī)構(gòu);由直線步進(jìn)電機(jī)控制轉(zhuǎn)向力的系統(tǒng)主要用于四輪轉(zhuǎn)向的后輪轉(zhuǎn)向機(jī)構(gòu)。現(xiàn)分別說明如下:
1.用直線步進(jìn)電機(jī)控制轉(zhuǎn)向助力的汽車轉(zhuǎn)向系統(tǒng)
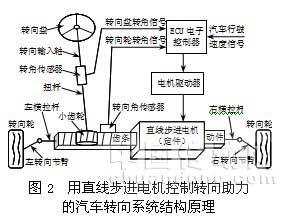
如圖2所示,其直線步進(jìn)電機(jī)的動件直接與轉(zhuǎn)向器齒條相連,整個直線步進(jìn)電機(jī)套裝在轉(zhuǎn)向器齒條機(jī)構(gòu)上,幾乎不占用空間。它也是在原先結(jié)構(gòu)最簡單的無助力機(jī)械轉(zhuǎn)向系中增加一臺直線步進(jìn)電機(jī),由直線步進(jìn)電機(jī)的直線推力來直接助力駕駛員對轉(zhuǎn)向器的操縱力矩,由于對轉(zhuǎn)向器的助力并不很大,齒條的直線位移量也不長,用一臺小型直線步進(jìn)電機(jī)足以驅(qū)動。其控制原理與EPS基本類同,只不過對電機(jī)的驅(qū)動需改用前述步進(jìn)電機(jī)脈沖分配方式。具體實施可參照有關(guān)EPS[1]中的電子控制器ECU與其控制邏輯等進(jìn)行,并借用EPS中相關(guān)傳感器。即根據(jù)轉(zhuǎn)向盤轉(zhuǎn)角信號控制直線步進(jìn)電動機(jī)位移量,利用轉(zhuǎn)向輪轉(zhuǎn)角信號來實現(xiàn)閉環(huán)控制,精確控制其位移量,根據(jù)車速進(jìn)行相應(yīng)的助力。在低速時給予較大助力,隨車速提高而減小助力,車速高到一定范圍時停止助力,而在汽車高速行駛時又希望能對轉(zhuǎn)向系統(tǒng)有一種“反向”助力,即適當(dāng)增加轉(zhuǎn)向系的阻尼。這一點對于現(xiàn)有的轉(zhuǎn)向系較難做到,而采用直線步進(jìn)電機(jī)助力就很容易實現(xiàn),根據(jù)直線步進(jìn)電機(jī)工作原理可知,只要保持其電機(jī)的通電狀態(tài)即可使該直線位移裝置具有一定自鎖力,控制其通電電流大小即可改變定、動件之間的磁拉力大小。從而可按車速信號根據(jù)要求來控制其轉(zhuǎn)向助力的大小,隨著車速的提高即減小繞組通電電流,其轉(zhuǎn)向助力也隨之減小;當(dāng)車速高于相應(yīng)速度(一般為30km/h)時就取消給轉(zhuǎn)向系助力,即停止給直線步進(jìn)電機(jī)供電;而當(dāng)車速高到一定程度時,希望能給轉(zhuǎn)向系逐漸增加其阻尼,可使直線步進(jìn)電機(jī)繞組保持通電狀態(tài)而產(chǎn)生自鎖力,控制其電流大小即能改變對轉(zhuǎn)向系的阻尼大小。達(dá)到對轉(zhuǎn)向盤的操縱即輕便靈敏又穩(wěn)定可靠。
2.用直線步進(jìn)電機(jī)控制轉(zhuǎn)向力的汽車轉(zhuǎn)向系統(tǒng)
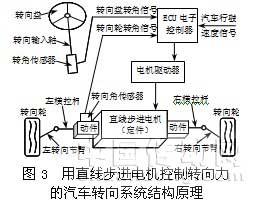
如圖3所示,它進(jìn)一步簡化了轉(zhuǎn)向系的結(jié)構(gòu),去掉轉(zhuǎn)向盤至橫拉桿中間的所有傳動鏈,包括齒輪輸入軸扭桿及齒輪齒條付。轉(zhuǎn)向盤內(nèi)安裝有轉(zhuǎn)向盤轉(zhuǎn)角傳感器,并適當(dāng)增加其轉(zhuǎn)動阻尼,獨立安置于駕駛室內(nèi)。而直線步進(jìn)電機(jī)的動件兩端直接與左右橫拉桿相連,電子控制器根據(jù)轉(zhuǎn)向盤的轉(zhuǎn)向角度信號及車速信號,來控制直線步進(jìn)電機(jī)動件進(jìn)行左右位移,經(jīng)橫拉桿、轉(zhuǎn)向節(jié)臂傳動,進(jìn)而控制車輪轉(zhuǎn)向。在確保系統(tǒng)可靠性的前提下,該方案的優(yōu)點是結(jié)構(gòu)更簡單、所占體積更小、成本低、控制更直接、響應(yīng)更快。但一旦系統(tǒng)發(fā)生故障,汽車就無法轉(zhuǎn)向。而用在四輪轉(zhuǎn)向4WS系統(tǒng)的后輪轉(zhuǎn)向機(jī)構(gòu)中卻是優(yōu)選的方案。它的應(yīng)用有望使汽車四輪轉(zhuǎn)向4WS系統(tǒng)的性價比進(jìn)一步得以提高。