
激光陀螺作為捷聯(lián)慣性導(dǎo)航系統(tǒng)的核心器件,其性能遠(yuǎn)優(yōu)越于傳統(tǒng)的機(jī)電陀螺,已廣泛應(yīng)用于海、陸、空、天等軍用和民用導(dǎo)航領(lǐng)域。
在激光陀螺捷聯(lián)慣導(dǎo)系統(tǒng)中,慣性儀表(激光陀螺和加速度計(jì))直接“捆綁”在載體上,所承受的力學(xué)環(huán)境要比平臺(tái)惡劣。在某些軍用環(huán)境所要求承受的強(qiáng)烈振動(dòng)條件下,由于慣性組合體在力和運(yùn)動(dòng)的激勵(lì)下產(chǎn)生多項(xiàng)誤差,系統(tǒng)姿態(tài)和位置誤差增長較快。研究表明,這些誤差項(xiàng)有一部分具有較好的補(bǔ)償性,可以通過誤差補(bǔ)償減小或消除部分誤差,從而提高系統(tǒng)在強(qiáng)振動(dòng)下的精度。這就需要將慣性儀表在振動(dòng)環(huán)境下的輸出數(shù)據(jù)高速采集并保存下來,然后在PC機(jī)上進(jìn)行離線仿真以確定和分離各項(xiàng)誤差系數(shù)。由于數(shù)據(jù)量龐大,無法直接存儲(chǔ)在導(dǎo)航計(jì)算機(jī)中:例如以8 kHz對(duì)慣性儀表輸出進(jìn)行采樣,每秒的數(shù)據(jù)量約為200 K字節(jié)。而原有捷聯(lián)慣導(dǎo)系統(tǒng)采用RS422接口與外部通訊,其最大波特率為1 M。不足以將高速數(shù)據(jù)傳送給PC機(jī)保存下來。因此,有必要在導(dǎo)航計(jì)算機(jī)外圍擴(kuò)展更高速的USB接口,以實(shí)現(xiàn)導(dǎo)航計(jì)算機(jī)和PC機(jī)之間的高速通訊。USB接口(Universal Serial Bus)是一種通用的高速串行通訊接口。USB2.0理論傳輸速度可達(dá)到480 Mb/s,可以很好地解決數(shù)據(jù)在慣導(dǎo)系統(tǒng)與PC機(jī)之間的高速互傳問題。
1 激光陀螺捷聯(lián)慣導(dǎo)系統(tǒng)的USB接口設(shè)計(jì)
1.1 USB接口芯片CY7C68013A
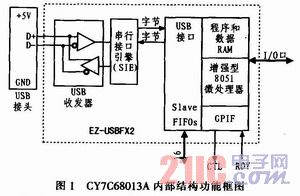
CY7C68013A是CYPRESS公司最新推出的USB2.O控制器,它既負(fù)責(zé)USB事務(wù)處理也兼具微處理器的控制功能,還可作為USB外部芯片的主控芯片,其小巧的體積及較高的性價(jià)比使得該芯片在各種USB設(shè)備上得到了廣泛的應(yīng)用。該芯片包括帶16KB片上RAM的高速8051單片機(jī)、4KBFIFO存儲(chǔ)器以及通用可編程接口(GPIF)、串行接口引擎(SIE)和USB2.0收發(fā)器,6條可編程控制輸出線,9條地址輸出線和6條通用的準(zhǔn)備輸入線。數(shù)據(jù)線寬度可設(shè)為8位也可設(shè)為16位,方便與不同的CPU接口。圖1是CY7C68013A的內(nèi)部結(jié)構(gòu)功能框圖。
由于CY7C68013A硬件邏輯并不復(fù)雜,加上可以充分利用FPGA的靈活性,在導(dǎo)航計(jì)算機(jī)外圍擴(kuò)展CY7C68013A的線路板設(shè)計(jì)工作相對(duì)簡單,將CY7C68013A的總線和控制信號(hào)與DSP導(dǎo)航計(jì)算機(jī)的FPGA相應(yīng)引腳正確相連即可。
USB接口的軟件設(shè)計(jì)要復(fù)雜一些,主要是編寫CY7C68013A自身的固件程序。
1.2 CY7C68013A的固件程序設(shè)計(jì)
CY7C68013A的固件程序主要用于USB芯片的端點(diǎn)配置、頻率設(shè)置、數(shù)據(jù)寬度、可編程標(biāo)志定義、中斷定義及特定功能的8051程序編寫等。固件程序主要完成如圖2所示的任務(wù)流程。
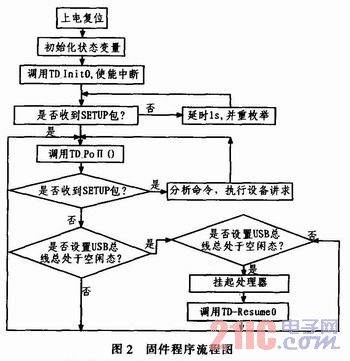
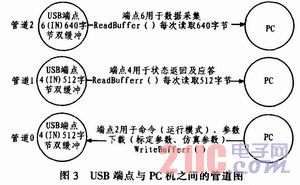
在上述固件程序當(dāng)中,CY7C68013A的初始化子程序TD_Init()的開發(fā)按照以下步驟進(jìn)行:按圖3中的規(guī)則配置端點(diǎn);使CY7C68013A工作在SLAVE FIFO模式,選擇BULK傳輸,使用3個(gè)端點(diǎn)EP2、EP4和EP6,全部采用雙緩沖方式;3個(gè)端點(diǎn)FIFO標(biāo)志分別定義為:FLGA為EP2的4字節(jié)接收可編程標(biāo)志,F(xiàn)IGB為EP6的滿標(biāo)志,F(xiàn)LGC為EP2的空標(biāo)志;數(shù)據(jù)寬度設(shè)為16位。
1.3 丟幀問題及解決措施
在導(dǎo)航計(jì)算機(jī)與PC機(jī)間通過USB接口進(jìn)行了雙向高速通訊測試。測試方法如下:PC機(jī)向?qū)Ш接?jì)算機(jī)傳輸一個(gè)數(shù)據(jù)包,導(dǎo)航計(jì)算機(jī)接收后回傳,PC機(jī)接收后進(jìn)行正確性校驗(yàn)、傳輸、回傳和校驗(yàn)過程循環(huán)進(jìn)行。測試中發(fā)現(xiàn)偶爾有丟幀現(xiàn)象出現(xiàn)。嘗試改變上位機(jī)中數(shù)據(jù)采集與后臺(tái)實(shí)時(shí)寫內(nèi)存線程的優(yōu)先級(jí)和改變CY7C68013A的端點(diǎn)大小及緩沖級(jí)別(如三緩沖、四緩沖)來解決這個(gè)問題,但是丟幀現(xiàn)象依然存在。
經(jīng)過較長時(shí)間的分析與驗(yàn)證,找到了問題所在:PC機(jī)中運(yùn)行的Windows操作系統(tǒng)是一個(gè)多任務(wù)的操作系統(tǒng),同時(shí)運(yùn)行著多個(gè)進(jìn)程,系統(tǒng)在給每個(gè)進(jìn)程分配時(shí)間片時(shí)也是有一定的優(yōu)先級(jí)的,優(yōu)先級(jí)高的進(jìn)程占用時(shí)間片較多,如果PC機(jī)在執(zhí)行某些其他進(jìn)程時(shí)占用時(shí)間超過了一定的限度,就可能導(dǎo)致該讀出的數(shù)據(jù)沒有及時(shí)讀出,而下一幀數(shù)據(jù)又已送到緩沖區(qū),覆蓋前一幀數(shù)據(jù),從而造成丟幀。
解決丟幀的辦法是在DSP的內(nèi)存中設(shè)置一個(gè)圓形緩沖區(qū),如果發(fā)現(xiàn)IN型端點(diǎn)的FIFO已滿(說明PC機(jī)未及時(shí)讀走FIFO中數(shù)據(jù)),則將本幀數(shù)據(jù)存入圓形緩沖區(qū)里,直到FIFO完全為空。
圓形緩沖區(qū)的結(jié)構(gòu)如圖4所示。
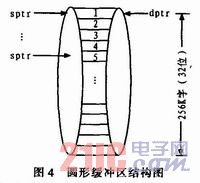
在圖4中,sptr為寫入數(shù)據(jù)指針,dptr為發(fā)送數(shù)據(jù)指針。整個(gè)圓形緩沖區(qū)的大小設(shè)置為256 K字(32位)。若按8 K的數(shù)據(jù)存入速率,可以保存8 s數(shù)據(jù)。在PC機(jī)不能及時(shí)讀取IN端點(diǎn)FIFO數(shù)據(jù)的情況下,這個(gè)圓形緩沖區(qū)可以起到很好的緩沖作用。
在程序執(zhí)行的初始時(shí)刻,設(shè)置指針sptr等于dptr。當(dāng)IN端點(diǎn)FIFO滿時(shí),DSP將數(shù)據(jù)按指針sptr存入圓形緩沖區(qū),sptr隨之遞增,而dptr保持不變。當(dāng)IN端點(diǎn)FIFO空時(shí),DSP仍將數(shù)據(jù)按指針sptr存入圓形緩沖區(qū),sptr隨之加1。但此時(shí)將從dptr指針處發(fā)送兩幀數(shù)據(jù)到FIFO中,這種dptr追趕sptr的機(jī)制,將保證圓形緩沖區(qū)不出現(xiàn)溢出現(xiàn)象:即不會(huì)出現(xiàn)sptr超過dptr一圈以上的情況。
1.4 通訊系統(tǒng)軟件整體設(shè)計(jì)
遵循軟件設(shè)計(jì)中盡量較少使用中斷的原則,這里只使用1個(gè)4 K中斷,其他三路信號(hào)都采用查詢方式,中斷分配如圖5所示。
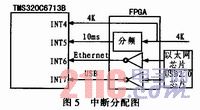
圖6為主程序流程。USB從管道0接收PC機(jī)發(fā)來的命令,命令寫入EP2端點(diǎn)中,此時(shí)在INT7管腳上產(chǎn)生USB中斷。DSP通過查詢INT7中斷,將EP2中的命令及數(shù)據(jù)讀出,對(duì)命令進(jìn)行解析,并執(zhí)行相應(yīng)的指令工作。非周期指令執(zhí)行完后,將接收數(shù)據(jù)寫入EP4端點(diǎn),PC機(jī)從管道1中將數(shù)據(jù)取走;周期指令執(zhí)行完后,將接收數(shù)據(jù)寫入EP6端點(diǎn),PC機(jī)從管道2中將數(shù)據(jù)取走。
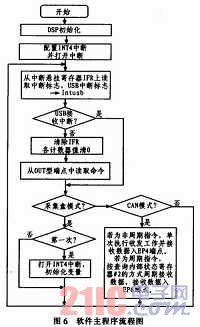
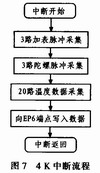
圖7中的4 K中斷流程主要完成陀螺和加速度計(jì)脈沖及溫度數(shù)據(jù)的采集工作,并向EP6端點(diǎn)寫入。
2 通訊效果測試
將激光陀螺慣性導(dǎo)航系統(tǒng)固定于振動(dòng)模擬臺(tái),按照軍用環(huán)境的要求進(jìn)行了近千小時(shí)的振動(dòng)實(shí)驗(yàn)。實(shí)驗(yàn)過程中導(dǎo)航計(jì)算機(jī)高速采集慣性儀表在振動(dòng)環(huán)境下的輸出數(shù)據(jù),并通過USB接口傳輸給PC機(jī)并保存下來。
當(dāng)圓形緩沖區(qū)的兩個(gè)指針各自達(dá)到最大位置后將從0地址重新開始,長時(shí)間雙向通訊的測試結(jié)果表明:將采用上述方法后的輸出數(shù)據(jù)與串口輸出數(shù)據(jù)進(jìn)行比對(duì),發(fā)現(xiàn)無丟幀現(xiàn)象產(chǎn)生。在導(dǎo)航計(jì)算機(jī)上進(jìn)行離線仿真以確定和分離各項(xiàng)誤差系數(shù),通過實(shí)時(shí)誤差補(bǔ)償減小了部分誤差,從而提高了系統(tǒng)在強(qiáng)振動(dòng)下的精度。當(dāng)然,PC機(jī)在與導(dǎo)航計(jì)算機(jī)的數(shù)據(jù)傳輸過程中,建議盡量減少運(yùn)行的任務(wù)數(shù)量,特別是占用CPU時(shí)間較多的任務(wù),如殺毒、音頻視頻解碼等。
3 結(jié)論
本文將基于CY7C68013A的USB接口技術(shù)應(yīng)用于慣導(dǎo)系統(tǒng)數(shù)據(jù)通信,創(chuàng)新性的設(shè)立圓形緩沖區(qū)解決了USB接口數(shù)據(jù)傳輸過程中的丟幀問題。近千小時(shí)測試結(jié)果表明:上述USB接口通訊裝置可實(shí)現(xiàn)導(dǎo)航計(jì)算機(jī)和PC機(jī)間高速實(shí)時(shí)數(shù)據(jù)傳輸且期間無丟幀現(xiàn)象發(fā)生,表明該裝置具有良好的穩(wěn)定性與可靠性。