
摘要:設(shè)計(jì)了一種以飛思卡爾MC9S08GB60 單片機(jī)為控制核心的汽車電控空氣懸架系
統(tǒng)。著重闡述了其硬件電路系統(tǒng)和具體電路設(shè)計(jì),并對(duì)軟件設(shè)計(jì)要點(diǎn)進(jìn)行了介紹。通過在實(shí)驗(yàn)室進(jìn)行臺(tái)架測(cè)試,驗(yàn)證了本系統(tǒng)相對(duì)于被動(dòng)懸架系統(tǒng)有效的改善了懸架動(dòng)行程,車輪動(dòng)載荷及車身垂直加速度三項(xiàng)重要指標(biāo),在實(shí)現(xiàn)車身高度調(diào)節(jié)控制的同時(shí)改善了車輛乘坐的舒適型。且電路結(jié)構(gòu)簡(jiǎn)單,穩(wěn)定性好,有實(shí)用應(yīng)用的價(jià)值。
關(guān)鍵詞:MC9S08GB60 電子控制單元空氣懸架
0 引言
空氣懸架主要有被動(dòng)懸架和可控電子懸架。被動(dòng)懸架一定程度上抑制和降低了車體和車
輪的動(dòng)載和振動(dòng),保證了車輛行駛安全性和乘坐舒適型。但由于被動(dòng)懸架的剛度和阻尼系數(shù)一般按經(jīng)驗(yàn)選取,只在特定環(huán)境下是最優(yōu),而一旦載荷,路況,速度等因素發(fā)生變化,被動(dòng)懸架不能隨之而自動(dòng)調(diào)節(jié),更不能手動(dòng)調(diào)節(jié)。為了克服這一缺陷,電子空氣懸架系統(tǒng)(ECAS)由此產(chǎn)生。ECAS 是目前最先進(jìn)的汽車懸架系統(tǒng),它可以隨著路況,載荷,速度等變化因子自動(dòng)調(diào)節(jié)懸架剛度,車身高度,減少了空氣消耗,且具有反應(yīng)迅速,安裝容易,操作簡(jiǎn)單等優(yōu)點(diǎn),因此可控電子懸架已經(jīng)成為汽車電子領(lǐng)域研究的一個(gè)熱門課題,其有著廣闊的發(fā)展前景。
1 ECAS 的組成及原理
電控空氣懸架系統(tǒng)由電子控制單元(ECU),高度傳感器、空氣彈簧、速度傳感器、減震
器,車高升降控制鍵盤等組成。ECU 通過高度傳感器實(shí)時(shí)檢測(cè)車身高度,間接獲得車身垂直加速度,同時(shí)通過速度傳感器檢測(cè)車輛行駛速度。ECU 內(nèi)保存若干指標(biāo)高度和三級(jí)可調(diào)阻尼值,指標(biāo)高度與彈簧的舒適性、駕駛安全性和與應(yīng)用規(guī)范保持一致。車速在不同的行駛條件下由ECU 自動(dòng)執(zhí)行相應(yīng)的指標(biāo)高度,也可由駕駛員手動(dòng)控制高度和阻尼值。通過比較高度傳感器檢測(cè)結(jié)果和指標(biāo)高度,若高度差超過了一定的公差范圍,電磁閥就會(huì)被激發(fā),通過充放氣將實(shí)際高度調(diào)整到指標(biāo)高度。減震器阻尼力共三檔,根據(jù)車身上升速度、加速度控制減震器,執(zhí)行相應(yīng)的阻尼力,從而滿足汽車行駛平順性和乘坐舒適型的要求。電控空氣懸架組成結(jié)構(gòu)如圖一。
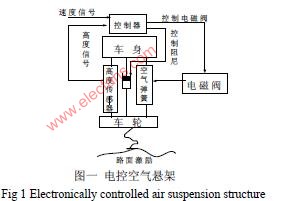
Fig 1 Electronically controlled air suspension structure
2 ECAS 系統(tǒng)各功能模塊的設(shè)計(jì)
ECAS 主要由6 大功能模塊組成,分別是中央處理單元,信號(hào)輸入模塊(即傳感器信號(hào)),信號(hào)輸出模塊(即控制量的輸出),操作界面模塊,電源模塊,其他模塊(外接存儲(chǔ)器,RS485通信,系統(tǒng)的升級(jí)擴(kuò)展端口)。
2.1 MC9S08GB60
單片機(jī)是ECU 的核心部件, 它要經(jīng)常處理大量的輸入和輸出信號(hào), 而且要實(shí)現(xiàn)高精度
和實(shí)時(shí)控制。本設(shè)計(jì)采用了美國飛思卡爾公司的加強(qiáng)型8 位車用微控制器——MC9S08GB60單片機(jī)。該單片機(jī)內(nèi)有64K flash 和4K 的E2PROM,高度集成了四個(gè)串行通信端口(SCI1,SCI2,SPI,I2C) ,最多達(dá)8 個(gè)定時(shí)器(PWM),8 通道的10 位A/D 轉(zhuǎn)換模塊。
2.2 信號(hào)傳感輸入模塊
該模塊主要由3 個(gè)高度傳感器和1 個(gè)速度傳感器構(gòu)成。車身高度傳感器等效電感串聯(lián)
電阻。等效電感0°轉(zhuǎn)角時(shí)對(duì)應(yīng)約20mH,-45°轉(zhuǎn)角時(shí)對(duì)應(yīng)約8mH,+45°轉(zhuǎn)角時(shí)對(duì)應(yīng)約35mH。等效電阻120Ω。為此設(shè)計(jì)了LC 三點(diǎn)式振蕩電路來檢測(cè)車身高度傳感器傳來的信號(hào),即設(shè)計(jì)一個(gè)正弦波發(fā)生器,由TL082 元件及外圍電路構(gòu)成,正弦波的頻率隨高度傳感器等效電感的變化而不斷變化,而后經(jīng)比較器出來一個(gè)頻率隨電感不斷變化的方波,經(jīng)三極管放大和光耦隔離后輸入到MCU 的輸入捕捉端口。MCU 通過檢測(cè)這一不斷變化的頻率來實(shí)現(xiàn)對(duì)高度傳感器傳來信號(hào)的檢測(cè)。電路如圖二所示,對(duì)速度傳感器信號(hào)的檢測(cè)也是通過檢測(cè)其頻率實(shí)現(xiàn)的,原理同高度傳感輸入電路類似。
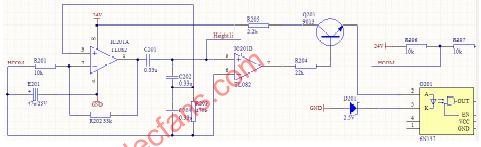
圖二 車身高度檢測(cè)電路
Fig 2 detection circuit of vehicle’s height
2.3 信號(hào)控制輸出模塊
ECU 采用PWM 方式輸出控制電磁閥的開啟,根據(jù)當(dāng)前實(shí)際高度與預(yù)期調(diào)節(jié)高度的偏差來輸出控制信號(hào)。ECU 計(jì)算電磁閥的調(diào)節(jié)脈沖長(zhǎng)度,如果需要調(diào)節(jié)的高度量大、由于沒有過沖危險(xiǎn),ECU 將給出一個(gè)長(zhǎng)的脈沖,同時(shí),快的上升速度將減小脈沖長(zhǎng)度,這樣就能精確控制車輛的高度調(diào)節(jié)速度,極大的避免了高度的過沖及振蕩調(diào)節(jié).對(duì)于電磁閥的驅(qū)動(dòng),本設(shè)計(jì)選用了安森美半導(dǎo)體公司生產(chǎn)的NUD3124 繼電器驅(qū)動(dòng)芯片。NUD3124(汽車版本)器件的高反向雪崩能量容量(350mJ)可以控制大多數(shù)用于汽車應(yīng)用的繼電器。控制信號(hào)經(jīng)過光耦隔離后輸出給NUD3124 驅(qū)動(dòng)芯片,由NUD3124 驅(qū)動(dòng)電磁閥工作,并在NUD3124 的輸出端加了一個(gè)二極管保護(hù)電路。
2.4 電源模塊,操作界面模塊及其他擴(kuò)展功能模塊
ECAS 系統(tǒng)主要有兩種電壓源,一是24V 電壓源,二是3V 電壓源。其中3V 電壓源分?jǐn)?shù)字電壓源和模擬電壓源。24V 電源是由車輛自身電源引出,然后經(jīng)π 型濾波,再經(jīng)穩(wěn)壓管穩(wěn)壓,在經(jīng)過一個(gè)濾波電路最終得到一個(gè)穩(wěn)定的24V 電壓源。3V 電壓源與此類似,只是須要在數(shù)字電源和模擬電源之間加上一個(gè)隔離電阻,以防串?dāng)_。
操作界面主要是鍵盤輸入和發(fā)光二極管顯示。當(dāng)司機(jī)要手動(dòng)控制阻尼和車高的時(shí)候,便可通過鍵盤輸入其操作,然后相應(yīng)的發(fā)光二極管亮,顯示其輸入。鍵盤輸入經(jīng)過了濾波,光耦隔離和IC106 濾波及保護(hù),最終送入ECU,然后ECU 輸出控制驅(qū)動(dòng)相應(yīng)發(fā)光二極管點(diǎn)亮。其他模塊主要包括便于日后升級(jí)的接口,以及RS485 通信,大容量存儲(chǔ)器等。大容量存儲(chǔ)器采用了ATMAL 公司的AT24C1024,其通過PTC2/SDA 和PTC3/SCL 與單片機(jī)相連;RS485用典型接法即可,芯片采用max3485;其他未用引腳均通過插槽引出,以便于日后升級(jí)之用。
3 汽車ECAS的軟件設(shè)計(jì)方案
空氣懸架電子控制單元(ECAS)應(yīng)用軟件由系統(tǒng)初始化模塊、判斷手動(dòng)自動(dòng)調(diào)高模塊、信號(hào)采集模塊,鍵盤響應(yīng)模塊,輸出控制模塊等構(gòu)成。主程序?yàn)橐谎h(huán)體,它擔(dān)負(fù)調(diào)節(jié)車身高度和阻尼的任務(wù),車身高度信號(hào)經(jīng)傳感器轉(zhuǎn)換為具有一定占空比的方波信號(hào),然后經(jīng)過與微處理器中預(yù)設(shè)的標(biāo)定高度進(jìn)行比較,輸出控制信號(hào),當(dāng)快達(dá)到標(biāo)定高度時(shí),減小輸出信號(hào)的占空比,以防止過充。具體主程序框圖如圖三所示。
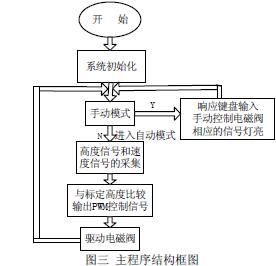
Fig 3 the structured flowchart of main program
4 試驗(yàn)及結(jié)果分析
本設(shè)計(jì)做了兩自由度1/4 車輛空氣懸架試驗(yàn),通過在一定頻率特性下,對(duì)比分析電控空
氣懸架和被動(dòng)空氣懸架在相同的路面激勵(lì)下,得到不同的懸架動(dòng)行程,車輛動(dòng)載荷及垂直加速度,來驗(yàn)證本設(shè)計(jì)的可行性[4],驗(yàn)證本設(shè)計(jì)是否達(dá)到了提高車輛行駛平順性和乘坐舒適型的目的。為下一步將科研成果轉(zhuǎn)換成汽車電子產(chǎn)品提供技術(shù)儲(chǔ)備和試驗(yàn)手段。
本試驗(yàn)系統(tǒng)用到了美國 INSTRON 公司8800 數(shù)控液壓伺服振動(dòng)測(cè)試系統(tǒng)、空氣彈簧、減振器、本文設(shè)計(jì)的控制器、加速度傳感器、車身高度傳感器、速度傳感器,Wavebook 信號(hào)采集器、電腦等。試驗(yàn)原理如圖四所示.試驗(yàn)系統(tǒng)上多加了兩個(gè)傳感器,分別是加速度傳感器和壓力傳感器,加這兩個(gè)傳感器是為了測(cè)出簧上垂直加速度和輪胎動(dòng)載荷。本試驗(yàn)過程中激勵(lì)信號(hào)采用模擬B 級(jí)路面、車速50km/h 的白噪聲隨機(jī)輸入信號(hào),試驗(yàn)時(shí)間30s,采樣間隔0.01s,空氣彈簧工作高度275mm,分別采集空氣懸架加控制器前、后的簧上質(zhì)量垂直振動(dòng)加速度,懸架動(dòng)行程和輪胎動(dòng)載荷。實(shí)驗(yàn)結(jié)果如圖五所示,通過本實(shí)驗(yàn)我們可以看出用本文所設(shè)計(jì)的電控空氣懸架系統(tǒng)明顯在懸架動(dòng)行程,車輛動(dòng)載荷和垂直加速度三項(xiàng)指標(biāo)上都比被動(dòng)懸架有明顯的改善,其中簧上質(zhì)量垂直振動(dòng)加速度的均方根值下降了12.89%說明本文所設(shè)計(jì)的控制器有效地改善了車輪的行駛平順性,得到了較好的懸架特性,有實(shí)際應(yīng)用的價(jià)值!
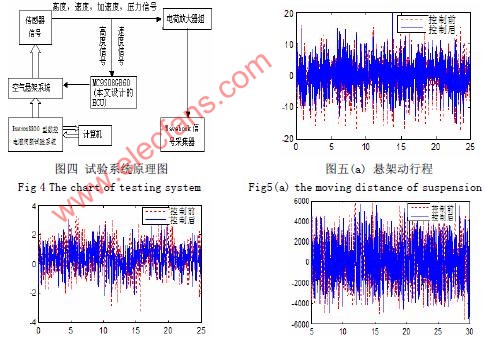
圖五(b) 垂直加速度 圖五(c) 車輪動(dòng)載荷