
0 引言
“實(shí)時(shí)控制”是指計(jì)算機(jī)對(duì)外部信息以足夠快的速度進(jìn)行處理、并作出反應(yīng)的一種控制。在實(shí)時(shí)控制系統(tǒng)中,通常把各種支持電路統(tǒng)稱(chēng)為接口電路,即控制接口電路,從受控過(guò)程的角度而言,所謂計(jì)算機(jī)控制實(shí)際上就是接口控制,即接口控制著整個(gè)系統(tǒng)。所以,應(yīng)用計(jì)算機(jī)進(jìn)行實(shí)時(shí)控制的硬件設(shè)計(jì)就是控制接口的設(shè)計(jì),所設(shè)計(jì)的控制接口的性能直接影響著整個(gè)實(shí)時(shí)控制系統(tǒng)的性能。所以控制接口的設(shè)計(jì)在計(jì)算機(jī)實(shí)時(shí)控制系統(tǒng)的設(shè)計(jì)中占有十分重要的地位,它把并不面向?qū)崟r(shí)控制的通用計(jì)算機(jī)改造成面向?qū)崟r(shí)控制的計(jì)算機(jī)系統(tǒng),在受控對(duì)象和通用計(jì)算機(jī)之間起著一個(gè)雙向匹配器的作用。一個(gè)設(shè)計(jì)完好的控制接口,不但會(huì)方便軟件設(shè)計(jì),為控制軟件功能的實(shí)施提供強(qiáng)有力的硬件支持,而且還能確保整個(gè)系統(tǒng)安全可靠地運(yùn)行。
下面以某實(shí)時(shí)控制系統(tǒng)為例,來(lái)闡述其控制接口的設(shè)計(jì)。
1 系統(tǒng)的功能及組成
1.1 系統(tǒng)功能
·在引導(dǎo)狀態(tài),控制雷達(dá)天線(xiàn)實(shí)現(xiàn)對(duì)目標(biāo)的搜索;
·在跟蹤狀態(tài),控制雷達(dá)天線(xiàn)實(shí)現(xiàn)對(duì)目標(biāo)的手控及全自動(dòng)跟蹤;
·控制發(fā)射架與天線(xiàn)同步轉(zhuǎn)動(dòng);
·實(shí)施發(fā)射控制。
1.2 系統(tǒng)組成
系統(tǒng)主要由主計(jì)算機(jī)(簡(jiǎn)稱(chēng)主機(jī))和付計(jì)算機(jī)(簡(jiǎn)稱(chēng)付機(jī))及控制接口電路組成,主機(jī)主要完成對(duì)天線(xiàn)的引導(dǎo)控制,付機(jī)主要完成對(duì)天線(xiàn)的手控跟蹤、自動(dòng)跟蹤、全自動(dòng)跟蹤和對(duì)發(fā)射架的控制。
·主機(jī)與付機(jī)通過(guò)8255并行通訊口,實(shí)施應(yīng)答式通訊,完成主機(jī)與付機(jī)的數(shù)據(jù)交換。
·付機(jī)通過(guò)8251串行通訊口,完成對(duì)天線(xiàn)的實(shí)時(shí)控制。
·付機(jī)通過(guò)8255并行通訊口,控制交流D/A變換器形成控制電壓,完成對(duì)發(fā)射架的控制。
2 引導(dǎo)控制接口電路設(shè)計(jì)
該系統(tǒng)在引導(dǎo)狀態(tài)下可控制天線(xiàn)粗略地跟蹤目標(biāo)或用搜索的方式發(fā)現(xiàn)目標(biāo)。
圖1為ε平面的引導(dǎo)控制接口電路。
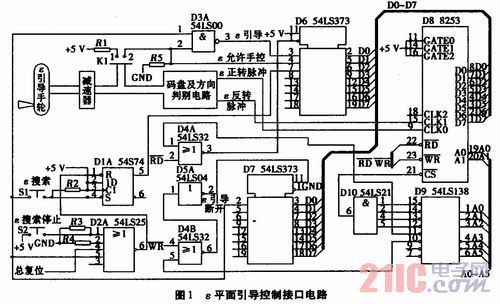
2.1 “引導(dǎo)”和“允許手控”控制信號(hào)的建立和清除
圖1中,D6、D7(54LS373)分別為輸入、輸出接口芯片,構(gòu)成控制接口電路與計(jì)算機(jī)的輸入、輸出通道。136接收并鎖存標(biāo)志系統(tǒng)狀態(tài)的開(kāi)關(guān)信號(hào),供計(jì)算機(jī)實(shí)時(shí)讀取,以控制系統(tǒng)進(jìn)入相應(yīng)的工作狀態(tài);D7則輸出系統(tǒng)的狀態(tài)信息給控制接口電路。
系統(tǒng)設(shè)定開(kāi)機(jī)的初始狀態(tài)為引導(dǎo)狀態(tài),此時(shí)D7的輸出狀態(tài)量“引導(dǎo)斷開(kāi)”信號(hào)為低電平,從而保證了無(wú)論手輪拉出或推入都會(huì)在D3A(54LS00)的輸出端形成“引導(dǎo)”狀態(tài)量送往計(jì)算機(jī),只是當(dāng)手輪拉出時(shí),微動(dòng)開(kāi)關(guān)K1斷開(kāi),K1的2點(diǎn)被電阻R5拉成低電平,故沒(méi)有“允許手控”信號(hào)形成,只有當(dāng)手輪推入時(shí),微動(dòng)開(kāi)關(guān)K1閉合,“允許手控”信號(hào)形成,并通過(guò)D6送往主機(jī),并通過(guò)付機(jī)通知跟蹤組合可隨時(shí)控制系統(tǒng)進(jìn)入跟蹤狀態(tài)。
手輪推入為“允許手控”信號(hào)的建立時(shí)刻,它的建立不應(yīng)清除先前建立的“引導(dǎo)”信號(hào),即此時(shí)系統(tǒng)仍工作在“引導(dǎo)”狀態(tài)。
當(dāng)輸出接口芯片D7(54LS373)的輸出狀態(tài)量“引導(dǎo)斷開(kāi)”信號(hào)變高時(shí),說(shuō)明跟蹤組合已進(jìn)入了跟蹤狀態(tài),此時(shí)D3A(54LS00)的輸出端變低,即“引導(dǎo)”信號(hào)被清除,使系統(tǒng)脫離“引導(dǎo)”狀態(tài)。
在“跟蹤”狀態(tài)下再次進(jìn)入“引導(dǎo)”狀態(tài)時(shí),只需將手輪拉出,這時(shí),送入計(jì)算機(jī)的“引導(dǎo)”信號(hào)變高,從而控制系統(tǒng)再次進(jìn)入“引導(dǎo)”狀態(tài)。
2.2 引導(dǎo)控制脈沖的產(chǎn)生
在引導(dǎo)狀態(tài)下,轉(zhuǎn)動(dòng)ε、R、β引導(dǎo)手輪(圖中只畫(huà)出了ε平面),便可實(shí)現(xiàn)對(duì)天線(xiàn)的位置控制。引導(dǎo)手輪轉(zhuǎn)動(dòng)時(shí),帶動(dòng)減速機(jī)構(gòu)和各自的光電碼盤(pán)轉(zhuǎn)動(dòng),光電碼盤(pán)輸出的光電脈沖,經(jīng)整形電路、方向判別電路的處理,完成對(duì)光電脈沖的整形和方向的判別,即當(dāng)手輪正轉(zhuǎn)時(shí),輸出正轉(zhuǎn)脈沖,反轉(zhuǎn)時(shí)輸出反轉(zhuǎn)脈沖。ε、R、β三個(gè)平面的正、反轉(zhuǎn)脈沖分別送到可編程接口芯片8253,8253是一種通用的計(jì)數(shù)器/定時(shí)器,它具有三個(gè)功能完全相同的計(jì)數(shù)器和一個(gè)控制寄存器。所以譯碼器D9(54LS138)需分配四個(gè)口地址給一片8253芯片。三個(gè)引導(dǎo)手輪產(chǎn)生的六路脈沖分別送到兩片8253的六個(gè)計(jì)數(shù)器的輸入端(圖中只畫(huà)出了ε平面即一片8253),系統(tǒng)初始化時(shí),計(jì)算機(jī)通過(guò)程序?qū)?253置為外部事件計(jì)數(shù)器,并給每個(gè)計(jì)數(shù)器賦以計(jì)數(shù)初值,工作時(shí),六個(gè)計(jì)數(shù)器分別對(duì)六路脈沖進(jìn)行遞減計(jì)數(shù),計(jì)算機(jī)用閂鎖操作的方式讀人正在計(jì)數(shù)狀態(tài)的計(jì)數(shù)值,形成ε、R、β平面坐標(biāo)位置的控制量。
2.3 “搜索”控制信號(hào)的建立和清除
系統(tǒng)在引導(dǎo)狀態(tài),可用“搜索”的方式控制天線(xiàn)發(fā)現(xiàn)目標(biāo)。由圖1可見(jiàn),搜索狀態(tài)量的建立是通過(guò)按鈕S1和觸發(fā)器D1A(54S74)完成的,54S74是兩個(gè)獨(dú)立的正沿觸發(fā)的D型觸發(fā)器,每個(gè)觸發(fā)器都有獨(dú)立的直接置位、直接復(fù)位的功能。為了信號(hào)的可靠傳輸,我們將54S74接成直接置位、直接復(fù)位的工作方式,它的輸入端接收開(kāi)關(guān)或按鈕的動(dòng)作,當(dāng)置位條件滿(mǎn)足時(shí),其輸出端便建立起相應(yīng)的狀態(tài)量,并通過(guò)接口芯片D6(54LS373)送入計(jì)算機(jī),從而控制天線(xiàn)進(jìn)行搜索。D1A(54S74)的復(fù)位端(第1腳)接有由或非門(mén)D2A(54LS25)構(gòu)成的狀態(tài)量清除電路,當(dāng)系統(tǒng)“復(fù)位”時(shí),或按下“搜索停止”時(shí),均可使觸發(fā)器D1A(54S74)復(fù)位,以清除先前建立的“搜索”狀態(tài)量。
3 跟蹤控制接口電路設(shè)計(jì)
3.1 跟蹤控制信號(hào)的建立和清除
系統(tǒng)在引導(dǎo)狀態(tài)下,當(dāng)雷達(dá)天線(xiàn)發(fā)現(xiàn)目標(biāo)后,可分別將引導(dǎo)組合的ε、R、β引導(dǎo)手輪推入,產(chǎn)生三個(gè)平面的“允許手控”指令,經(jīng)由主機(jī)、付機(jī)從而控制天線(xiàn)進(jìn)入跟蹤狀態(tài)。在跟蹤狀態(tài),ε、R、β三個(gè)平面均有“手控”“自動(dòng)”、“天線(xiàn)自動(dòng)”三種工作方式,其跟蹤精度依次而高。圖2為ε平面跟蹤控制電路圖。由圖可見(jiàn),“允許手控”、“手控”、“自動(dòng)”、“天線(xiàn)自動(dòng)”這四個(gè)控制信號(hào)組成一個(gè)有序的狀態(tài)量鏈條,它們的建立必須依從以下的順序依次建立,而不能超越。
允許手控→手控→自動(dòng)→天線(xiàn)自動(dòng).
其中,“允許手控”是基礎(chǔ),當(dāng)將引導(dǎo)手輪拉出時(shí),上述鏈條立即失效,系統(tǒng)又回到引導(dǎo)狀態(tài)。
由圖2可見(jiàn),當(dāng)按下“手控”按鈕S1時(shí),可建立“手控”控制信號(hào),控制系統(tǒng)由“引導(dǎo)”狀態(tài)進(jìn)入“手控”狀態(tài),或由“自動(dòng)”、“天線(xiàn)自動(dòng)”狀態(tài)回到“手控”狀態(tài)。
當(dāng)按下“自動(dòng)”按鈕S2時(shí),可建立“自動(dòng)”控制信號(hào),控制系統(tǒng)由“手控”狀態(tài)進(jìn)入“自動(dòng)”狀態(tài)。
當(dāng)按下“天線(xiàn)自動(dòng)”按鈕S3時(shí),可建立“天線(xiàn)自動(dòng)”控制信號(hào),控制系統(tǒng)由“自動(dòng)”狀態(tài)進(jìn)入“天線(xiàn)自動(dòng)”狀態(tài)。它并不清除先前建立的“自動(dòng)”控制信號(hào)。
當(dāng)按下“天線(xiàn)自動(dòng)斷開(kāi)”按鈕S4時(shí),可控制天線(xiàn)由“天線(xiàn)自動(dòng)”狀態(tài)回到“自動(dòng)”狀態(tài)。
3.2 跟蹤控制脈沖的產(chǎn)生
在“手控”和“自動(dòng)”工作狀態(tài),系統(tǒng)對(duì)天線(xiàn)的控制是通過(guò)轉(zhuǎn)動(dòng)跟蹤操縱臺(tái)上的兩個(gè)模球從而控制天線(xiàn)對(duì)目標(biāo)進(jìn)行跟蹤的。其中的一個(gè)模球控制ε/R兩個(gè)平面,即當(dāng)其水平方向轉(zhuǎn)動(dòng)時(shí),可產(chǎn)生ε平面的控制脈沖,當(dāng)其垂直方向轉(zhuǎn)動(dòng)時(shí),可產(chǎn)生R平面的控制脈沖;另一個(gè)模球則控制盧平面。圖2僅畫(huà)出了ε平面的模球示意圖。
模球是一個(gè)在任意方向都可以轉(zhuǎn)動(dòng)的球體,緊挨著球體,裝有兩個(gè)互成90度的磨擦輪,當(dāng)球體轉(zhuǎn)動(dòng)時(shí),磨擦輪將其分解為X、Y兩個(gè)向量,兩個(gè)磨擦輪分別帶動(dòng)一個(gè)光碼盤(pán),模球轉(zhuǎn)動(dòng)時(shí),光碼盤(pán)輸出脈沖,其脈沖個(gè)數(shù)比例于模球在本方向上的轉(zhuǎn)角,可見(jiàn),一個(gè)模球可以同時(shí)控制兩個(gè)座標(biāo)。由于機(jī)械裝配的保證,模球轉(zhuǎn)動(dòng)時(shí),兩個(gè)光碼盤(pán)分別輸出A、B兩組脈沖,兩組脈沖在相位上相差90度,用此相位差可判別手輪轉(zhuǎn)動(dòng)的方向。光碼盤(pán)輸出的控制脈沖經(jīng)過(guò)整形判別電路之后產(chǎn)生正轉(zhuǎn)脈沖和反轉(zhuǎn)脈沖,分別送到可編程接口芯片8253進(jìn)行計(jì)數(shù),其計(jì)數(shù)值被計(jì)算機(jī)實(shí)時(shí)讀取,經(jīng)處理后控制天線(xiàn)運(yùn)動(dòng)。
4 發(fā)射控制接口電路設(shè)計(jì)
4.1 發(fā)射控制信號(hào)的產(chǎn)生
當(dāng)天線(xiàn)和發(fā)射架處于同步狀態(tài)時(shí),可以擇機(jī)進(jìn)行發(fā)射。
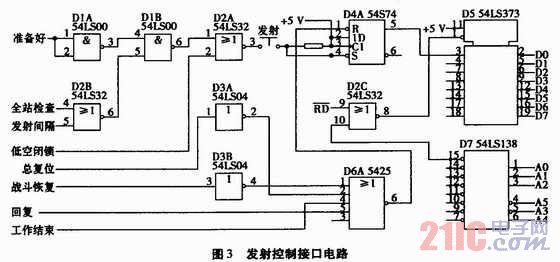
發(fā)射控制接口電路見(jiàn)圖3。
由圖3可見(jiàn),允許發(fā)射電路由D1(54LS00)、D2(54LS32)構(gòu)成,當(dāng)發(fā)射架送來(lái)“準(zhǔn)備好”信號(hào),且發(fā)射架不在低空限制區(qū)域,發(fā)射時(shí)間在發(fā)射間隔之外時(shí),按下“發(fā)射”按鈕,即有“發(fā)射”信號(hào)在觸發(fā)器D4A(54S74)的輸出端形成并通過(guò)輸入接口芯片D5(54LS373)送計(jì)算機(jī)(付機(jī)),經(jīng)處理后控制發(fā)射架發(fā)射。
4.2 發(fā)射狀態(tài)的恢復(fù)
由圖3可見(jiàn),發(fā)射狀態(tài)的恢復(fù)電路由D3A、D3B(54LS04)和D6A(54LS25)組成。其恢復(fù)邏輯如下:
5 結(jié)束語(yǔ)
用于實(shí)時(shí)控制系統(tǒng)的接口電路要求具有高度的合理性、可靠性和可維性。在滿(mǎn)足性能的前提下,要盡可能的簡(jiǎn)單、實(shí)用。要精心設(shè)計(jì),反復(fù)試驗(yàn),才不致于造成不應(yīng)有的損失和遺憾。