
0 引言
隨著計算機網(wǎng)絡(luò)技術(shù)和軍事需求的不斷提高,作戰(zhàn)模擬逐步由單機環(huán)境轉(zhuǎn)向網(wǎng)絡(luò)環(huán)境,分布交互式作戰(zhàn)仿真成為研究的重點,各種支撐技術(shù)相繼出臺,最具代表性和發(fā)展?jié)摿Φ氖腔诟邔芋w系結(jié)構(gòu)(High Level Architecture,HLA)框架下構(gòu)建的作戰(zhàn)仿真系統(tǒng)。計算機生成兵力(Computer Generated Forces,CGF)是作戰(zhàn)仿真系統(tǒng)的一個重要組成部分,它通過一定的協(xié)議把分布在模擬器中的個體聯(lián)入同一個虛擬戰(zhàn)場環(huán)境中實現(xiàn)綜合仿真。通過對人類作戰(zhàn)行為足夠的建模,這些實體能不需要人為的交互而自動地對仿真戰(zhàn)場環(huán)境中的事件和狀態(tài)做出反應(yīng)。基于HLA的某自行高炮武器系統(tǒng)模擬訓(xùn)練平臺是采用HLA的技術(shù)、體制和思想構(gòu)建起來的先進仿真訓(xùn)練環(huán)境,它主要完成高炮的戰(zhàn)法演練、日常訓(xùn)練、裝備論證等任務(wù)。高炮CGF是某自行高炮武器模擬訓(xùn)練系統(tǒng)中的一個聯(lián)邦成員,其本身也作為一個獨立的聯(lián)邦,能為受訓(xùn)人員提供交戰(zhàn)對手或援軍的主要兵力實體,其模型的準確性、有效性、真實性將直接關(guān)系到高炮作戰(zhàn)模擬訓(xùn)練的效果。由上可知,構(gòu)建基于HLA的高炮CGF對整個仿真系統(tǒng)科學(xué)、有效地運行具有重要的意義。
1 高炮CGF的設(shè)計思想及原則
1.1 設(shè)計思想
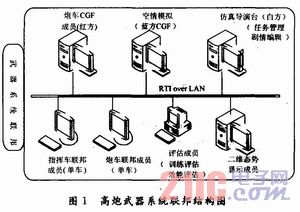
由上可知,高炮CGF是作為一個聯(lián)邦成員加入高炮武器系統(tǒng)模擬訓(xùn)練平臺的,如圖1所示,需要說明的是,高炮CGF本身也是一個聯(lián)邦,它也有自己的聯(lián)邦成員,本文所研究的就是高炮CGF作為聯(lián)邦其本身的構(gòu)建過程。按照聯(lián)邦開發(fā)執(zhí)行過程(Federation Development and Execution Process,F(xiàn)EDEP),根據(jù)明確的聯(lián)邦開發(fā)目標來開發(fā)聯(lián)邦概念模型(Federation Conceptual Model,F(xiàn)CM)。高炮CGF聯(lián)邦的開發(fā)目標是建立一個能夠在高炮武器系統(tǒng)模擬訓(xùn)練平臺中為受訓(xùn)人員提供交戰(zhàn)援軍的智能高炮兵力實體,它不僅具有構(gòu)建各種不同類型和功能的高炮的重用能力,更重要的是通過給定不同的初始化數(shù)據(jù)可快速重構(gòu)出高炮作戰(zhàn)訓(xùn)練所需要的具有不同層次的指揮決策能力和戰(zhàn)術(shù)行為的仿真智能高炮。
1.2 設(shè)計原則
高炮CGF實體采用簡化的動態(tài)模型,具有節(jié)省時間、充分體現(xiàn)對象外在特性、模型易于機動控制的特點。高炮CGF必須符合HLA所提出的聯(lián)邦成員規(guī)則,才能與HLA兼容。HLA為聯(lián)邦和聯(lián)邦成員提出了必須遵循的10條規(guī)則,其中聯(lián)邦成員規(guī)則有5條,分別為:每個聯(lián)邦成員必須具有一個符合HLA OMT規(guī)范的仿真對象模型(Simulation Object Model,SOM);每個聯(lián)邦成員必須能夠更新或反射其在SOM中說明的任何屬性、發(fā)送和接受SOM中說明的交互實例;在聯(lián)邦運行過程中,聯(lián)邦成員應(yīng)能動態(tài)轉(zhuǎn)移或接受在它的SOM中說明的對象屬性所有權(quán);聯(lián)邦成員應(yīng)能改變其SOM中規(guī)定的更新屬性值的條件(例如閾值);聯(lián)邦成員應(yīng)該能管理局部時間,從而允許它和聯(lián)邦中的其他成員協(xié)調(diào)數(shù)據(jù)交換。
HLA主要由規(guī)則(Rules)、對象模型模板(OMT,Object Model Template)和接口規(guī)范(Interface Specification)3部分組成。在HLA中將仿真應(yīng)用與底層的通信和分布仿真基本功能相分離,由運行時間框架(Run Time Infrastructure,RTI)提供的服務(wù)來實現(xiàn)底層的通信和基本功能,即在一個聯(lián)邦的執(zhí)行過程中,所有的聯(lián)邦成員按照HLA的接口規(guī)范說明所要求的方式同RTI進行數(shù)據(jù)交換,實現(xiàn)成員間的互操作。高炮CG-F、聯(lián)邦通過向RTI請求服務(wù)的方式完成某些操作,并及時更新對象實例的屬性和交互類屬性。
2 高炮CGF系統(tǒng)的仿真模型
通用CGF系統(tǒng)中的模型主要有3種,即物理行為模型、智能行為模型和環(huán)境模型,只有正確地建立這3種模型,最后所得到的CGF對象才是可信的。高炮CGF實體一般行為是指高炮在戰(zhàn)場中的物理行為,中間包含了智能行為的實現(xiàn),智能行為模型建立在物理模型之上,在通過物理模型獲取感知和命令的基礎(chǔ)上,經(jīng)過推理產(chǎn)生決策,并通過物理模型實施決策、產(chǎn)生效應(yīng),作用于戰(zhàn)場環(huán)境。如高炮實體在虛擬戰(zhàn)場環(huán)境中的機動、偵查、開火,射彈散布,以及高炮分隊路徑規(guī)劃、隊形變換、火控運用等聚合級行為。根據(jù)某自行高炮的戰(zhàn)斗行為,將高炮CGF的實體模型進行分類,如圖2所示。
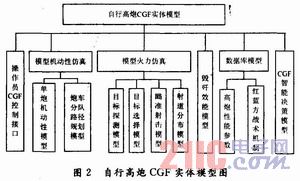
高炮攻防對抗過程可看成是由一系列離散一連續(xù)事件和活動組成,該CGF系統(tǒng)主要由CGF操作員接口和5大模型組成,即機動模型、火控模型、毀殲效能評判模型、數(shù)據(jù)庫模型和智能決策模型。
(1)機動模型。主要包括進攻過程中單炮機動模型,分隊作戰(zhàn)的路徑規(guī)劃模型。
(2)火控運用模型。主要包括目標探測模型,目標選擇模型,瞄準射擊模型,射道分布模型。
(3)評判模型。主要包括紅藍雙方的毀傷結(jié)果,并進行相關(guān)的數(shù)據(jù)統(tǒng)計分析。
(4)數(shù)據(jù)庫模型。主要包括雙方參戰(zhàn)的性能參數(shù),紅藍方的戰(zhàn)術(shù)機制,高炮的位置、配置地域等情況。
(5)智能決策模型。智能決策模型設(shè)計是建模的關(guān)鍵環(huán)節(jié),主要采用人工智能技術(shù)來進行智能決策模型的建立。
3 高炮CGF智能決策模型的實現(xiàn)方案
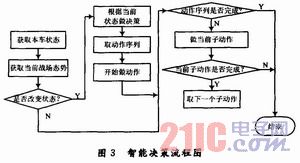
CGF的研究重點在于實體行為,尤其是智能行為的實現(xiàn)。目前,實現(xiàn)CGF的智能行為主要采用人工智能技術(shù)。高炮CGF行為模型中的智能決策模塊將由物理模型傳來的信息根據(jù)知識庫進行決策,模塊內(nèi)部由2大部分組成:接口模塊和決策模塊。其中接口模塊由接收屬性模塊、發(fā)布交互模塊組成。決策模塊分為決策器模塊、數(shù)據(jù)庫管理模塊、戰(zhàn)術(shù)控制規(guī)則數(shù)據(jù)庫和歷史信息庫模塊。決策模塊采用人工神經(jīng)網(wǎng)絡(luò)的智能算法實現(xiàn),決策過程為:決策機制接收當前環(huán)境的狀態(tài)信息,結(jié)合炮車的自身狀態(tài),參照任務(wù)目標做出決策,產(chǎn)生動作控制信息。在高炮CGF系統(tǒng)中,先用模糊邏輯的方法對當前態(tài)勢進行分類,判斷所采用戰(zhàn)術(shù)規(guī)則的類別,再根據(jù)規(guī)則庫實施戰(zhàn)術(shù)決策,并對當選戰(zhàn)術(shù)進行動作規(guī)劃,再將決策結(jié)果作為控制信息傳回給物理模型實體。在智能決策過程中,需要考慮當前狀態(tài)數(shù)據(jù)與規(guī)則條件的匹配、規(guī)則的搜索、沖突消解、匹配失敗的處理等問題,同時還要考慮智能決策的實時性問題。實時決策是指在決策過程中,當某規(guī)則最適合當前態(tài)勢時,能夠迅速啟用該規(guī)則,充分抓住戰(zhàn)機;而當所有規(guī)則都不適合當前態(tài)勢時,要盡快結(jié)束本次決策過程,以便隨時迅速進入下一輪決策,決策流程如圖3所示。
4 基于HLA的高炮CGF系統(tǒng)設(shè)計
基于HLA的高炮武器系統(tǒng)模擬訓(xùn)練平臺的設(shè)計是聯(lián)邦的開發(fā)過程,高炮CGF仿真子系統(tǒng)的設(shè)計則是聯(lián)邦成員的開發(fā)過程。按照聯(lián)邦成員的開發(fā)過程,應(yīng)對高炮作戰(zhàn)過程、涉及的事件、構(gòu)建的模型、工作時序、輸入輸出信息及與其他仿真成員組之間的關(guān)系等進行分析。
4.1 高炮CGF仿真子系統(tǒng)與其他聯(lián)邦成員的關(guān)系
由高炮武器系統(tǒng)聯(lián)邦結(jié)構(gòu)圖(圖1)可知,高炮CGF仿真子系統(tǒng)(紅方成員)與其他子系統(tǒng)(成員組)之間是通過HLA接口與RTI連接,由RTI實現(xiàn)成員(對象)之間的數(shù)據(jù)交換和控制。
4.2 高炮火控單元射擊指揮過程分析
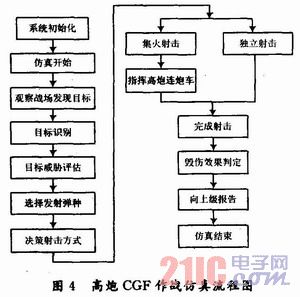
高炮火控單元的射擊指揮過程,即火控單元完成對空中目標射擊的全過程可用下列事件來表征:目標搜索控制、目標跟蹤處理、目標威脅評估及排序、發(fā)生決策、火控分配、發(fā)射和殺傷效果評估及火控轉(zhuǎn)移。
4.3 信息公布訂購關(guān)系
高炮CGF仿真子系統(tǒng)要完成防空作戰(zhàn)過程仿真,必須與其他仿真成員之間發(fā)生信息交互,交互的信息主要有:
(1)與導(dǎo)演臺成員組之間訂購的交互類包括:啟動仿真運行、暫停和結(jié)束的控制信息;顯示方式、內(nèi)容的控制信息;武器系統(tǒng)性能參數(shù)信息。
(2)公布的交互類包括:防空火控單元的類型、數(shù)量及部署位置(坐標)信息;炮彈的飛行軌跡數(shù)據(jù);防空作戰(zhàn)結(jié)果數(shù)據(jù)等。
(3)與戰(zhàn)場環(huán)境成員組之間訂購的交互類包括:被保衛(wèi)陣地的類型、編號、坐標等信息;電子干擾手段、樣式信息等。
(4)公布的交互類包括:防空火控單元的類型、數(shù)量及部署位置信息;預(yù)警雷達類型、數(shù)量、及部署位置信息等。
(5)與藍方成員組之間訂購的交互類包括:空中目標的航跡數(shù)據(jù)(批次、架次、坐標、時間等)信息;攻擊機投放的炸彈航跡數(shù)據(jù)信息等。
(6)公布的交互類包括:炮彈的飛行軌跡數(shù)據(jù);火控單元陣地毀傷信息。
高炮CGF作戰(zhàn)仿真系統(tǒng)的工作流程圖如圖4所示。
4.4 基于HLA的CGF高炮系統(tǒng)決策仿真實例
圖5為基于HLA的高炮CGF系統(tǒng)決策仿真實例,本CGF系統(tǒng)中的RTI采用HLA1.3標準,仿真開始后,目標信息、高炮狀態(tài)和炮手決策參數(shù)從輸入端傳人,經(jīng)過仿真運行,得到炮手決策的相關(guān)參數(shù)和高炮的開火狀況,如圖5所示。
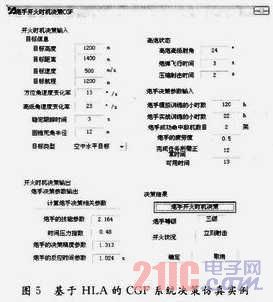
決策結(jié)果炮手立刻開火射擊。該仿真平臺能夠模擬火控系統(tǒng)工作過程的整個場景,實現(xiàn)了比較逼真的火控系統(tǒng)工作過程的決策行為模擬。
5 結(jié)語
在HLA框架下實現(xiàn)高炮CGF,用少量的網(wǎng)絡(luò)節(jié)點達到大量增加戰(zhàn)場實體,擴展作戰(zhàn)仿真規(guī)模的目的。下一步工作中要繼續(xù)完善聯(lián)邦成員的各種模型,使之成為一個具有標準HLA接口和完善功能的聯(lián)邦成員,并按照OMT一致的標準開發(fā)高炮CGF的聯(lián)邦對象模型(Federation Object Model,F(xiàn)OM),給出其核心類表。同時,要進一步提高CGF系統(tǒng)的自治性,將所研制的CGF系統(tǒng)置于分布式虛擬環(huán)境中,以提高基于分布式虛擬戰(zhàn)場環(huán)境的軍事演練的真實水平。