
1前言
醫(yī)學(xué)治療儀的服務(wù)對(duì)象是人,由此決定了對(duì)其傳動(dòng)控制系統(tǒng)要求的嚴(yán)格性,尤其是用于治療頸椎病和腰椎間盤突出癥的治療設(shè)備,對(duì)傳動(dòng)系統(tǒng)的安全性和準(zhǔn)確性提出了 更高的要求:絕對(duì)不允許失速,不允許越位,且停車準(zhǔn)確。同時(shí)為了簡(jiǎn)化機(jī)械部分的設(shè)計(jì)及減少相關(guān)的傳感器,從機(jī)電一體化的原則考慮,將大部分控制功能由電氣 控制來完成。
治療儀傳動(dòng)系統(tǒng)要求電機(jī)轉(zhuǎn)速控制在100~250r/min之間,再通過50∶1的機(jī)械減速器減速,傳動(dòng)扭矩>1.5Nm。擺動(dòng)幅度要求為頸椎:±30°~±60°;腰椎:±60°~±100°;起終點(diǎn)均應(yīng)控制在中心位置。轉(zhuǎn)速及擺幅均應(yīng)根據(jù)具體病例可調(diào)。
2智能化全數(shù)字式專用變頻器的設(shè)計(jì)
(1) 考慮到醫(yī)學(xué)治療儀的特殊要求,為了提高變頻器的工作可靠性和控制精度,采用智能化數(shù)字化設(shè)計(jì),同時(shí)也結(jié)合小型化的特點(diǎn),主功率器件采用日本三菱電機(jī)的 IGBT智能功率模塊(IPM)PM20CSJ060。輸入為單相220V交流,經(jīng)單相全橋整流器整流后供給智能功率模塊,輸出為三相220V交流,接 0.5kW三相異步電動(dòng)機(jī)(改為△接法)。
(2) 采用INTEL公司的16位單片機(jī)80C196KC作為系統(tǒng)CPU,它具有運(yùn)算速度快,精度高,指令功能強(qiáng)等特點(diǎn)。并帶有8路10位A/D轉(zhuǎn)換器,可以完 成模擬量和數(shù)字量信號(hào)的檢測(cè)。控制運(yùn)算及數(shù)據(jù)處理,保護(hù)功能的邏輯判斷,給PWM產(chǎn)生電路SA4828送設(shè)定和控制數(shù)據(jù),以及管理鍵盤和數(shù)碼顯示等功能。
(3)SPWM波發(fā)生器采用英國MITEL公司 的增強(qiáng)型運(yùn)動(dòng)控制大規(guī)模集成電路SA4828。該芯片作為一種獨(dú)立于微處理器的外設(shè)形式工作,但它可以受控于任何類型的微處理器而幾乎不需要附加任何邏輯 電路。管腳的配置使其能適用于大部分總線格式,包括復(fù)用的地址/數(shù)據(jù)總線格式和RD/WR或R/W控制模式。由于僅在改變運(yùn)行狀態(tài)時(shí)需要微處理器的介入, 因此工作時(shí)芯片幾乎不占用CPU的資源。
SA4828采用全數(shù)字化操作,載波頻率可達(dá)24kHz。內(nèi)部ROM中存有三種可選的輸出電源波形,諧波抑制技術(shù)可減少功率器件的損耗。16位頻率控制精度,三個(gè)獨(dú)立的幅值寄存器可進(jìn)行三相不平衡補(bǔ)償。利用SA4828設(shè)計(jì)的變頻器硬件結(jié)構(gòu)圖如圖1所示。
圖1采用SA4828的變頻器硬件結(jié)構(gòu)框圖
3SA4828的功能特點(diǎn)及工作原理
3.1SA4828管腳圖及管腳功能說明
SA4828管腳圖如圖2所示。管腳功能說明見表1。

圖2 SA4828管腳圖
表1 SA4828管腳說明

3.2SA4828內(nèi)部結(jié)構(gòu)框圖及工作原理
圖3為SA4828的內(nèi)部結(jié)構(gòu)框圖,從圖中可以看到SA4828主要由三部分構(gòu)成:
(1)接收并存儲(chǔ)微處理器命令(控制字)的部分,它主要由總線控制、總線譯碼、暫存器R0、R1…R5,虛擬寄存器R14、R15及32位初始化寄存器和48位控制寄存器構(gòu)成;
(2)從波形ROMS讀取調(diào)制波形的部分,它由地址發(fā)生器和波形解壓縮緩沖器構(gòu)成;
(3)三相輸出控制電路及輸出脈沖鎖存電路,每相輸出控制電路又由脈沖刪除電路和脈沖延遲電路組成。
圖3SA4828芯片內(nèi)部框圖
SA4828 芯片具有并行的接口與微處理器進(jìn)行通信。該接口和幾乎所有工業(yè)標(biāo)準(zhǔn)的微處理器諸如8051、8096、6805、68000和TMS320等兼容而不需要 考慮總線的寬度及增加額外的邏輯電路。大多數(shù)的數(shù)據(jù)總線結(jié)構(gòu)可分為復(fù)用地址/數(shù)據(jù)總線和獨(dú)立的地址/數(shù)據(jù)總線,而大部分的微處理器不是WR/RD結(jié)構(gòu)就是R/W結(jié)構(gòu);而該芯片設(shè)計(jì)成可以與上述四種組合中的任一種配合使用。通過一個(gè)配置引腳(MUX)和一個(gè)寄存器選擇引腳(RS)的狀態(tài)來區(qū)別所有的總線格式。
更重要的是,在系統(tǒng)異常情況(過流或過壓)下,一個(gè)緊急關(guān)斷輸入(SETTRIP)能不受微處理器的控制而迅速關(guān)斷所有的PWM輸出,這很好地解決了變頻器的快速保護(hù),避免了因CPU中斷服務(wù)指令周期所造成的延誤。
3.3SA4828芯片的控制功能
對(duì)SA4828芯片的控制是通過微處理器接口將數(shù)據(jù)送入內(nèi)部的兩個(gè)寄存器來實(shí)現(xiàn)的。它們是初始化寄存器和控制寄存器。
初始化寄存器用于設(shè)定和電機(jī)及逆變器有關(guān)的一些基本參數(shù),這些參數(shù)在電機(jī)工作前就被初始化,并且在電機(jī)工作時(shí)一般不允許改變。
控制寄存器在電機(jī)工作過程中控制脈寬調(diào)制波的狀態(tài),從而進(jìn)一步控制電機(jī)的運(yùn)行,比如轉(zhuǎn)速,正/反轉(zhuǎn),起動(dòng)和停止等。通常在電機(jī)工作時(shí)寄存器的內(nèi)容經(jīng)常被改寫以實(shí)現(xiàn)對(duì)電機(jī)的實(shí)時(shí)控制。
由于受到8位數(shù)據(jù)接口的限制,數(shù)據(jù)需首先讀入六個(gè)臨時(shí)寄存器R0、R1…R5中,這些數(shù)據(jù)隨即被送入相應(yīng)的初始化寄存器或控制寄存器。新的數(shù)據(jù)只有在寫入對(duì)應(yīng)的寄存器中時(shí)才能真正地發(fā)揮作用。
數(shù)據(jù)的傳送是通過寫入虛擬寄存器的操作來實(shí)現(xiàn)的。如寫寄存器R14是將初始化數(shù)據(jù)傳送到初始化寄存器中,寫寄存器R15則是將控制數(shù)據(jù)傳送到控制寄存器中。 由于R14、R15并不是實(shí)際的寄存器,因此什么數(shù)據(jù)被寫入并不重要,往這里寫數(shù)據(jù)的操作才真正執(zhí)行往初始化寄存器或控制寄存器中傳送數(shù)據(jù)的操作。
(1)初始化寄存器的編程
初始化寄存器將確定如下參數(shù):載波頻率,電源頻率范圍,脈沖延遲時(shí)間,脈沖取消時(shí)間,波形選擇,醫(yī)學(xué)治療儀專用變頻器的研制幅值控制,計(jì)數(shù)器復(fù)位(這個(gè)功能 可使SA4828內(nèi)部將調(diào)制頻率計(jì)數(shù)器置為0,此時(shí)禁止正常的頻率控制操作,每一相輸出占空比為50%的脈沖),軟件復(fù)位等。這些參數(shù)由相應(yīng)的控制字確 定,而這些控制字在送到32位初始化寄存器之前,先要分別送到4個(gè)8位寄存器R0、R1、R2和R3中。其內(nèi)容如表2所示:
表2 寄存器內(nèi)容

注:不用的位(×)應(yīng)該寫入0,這樣可與以后的產(chǎn)品保持代碼兼容。
①載波頻率選擇
R0中的CFS字稱為載波頻率選擇字,設(shè)n為與CFS字相對(duì)應(yīng)的十進(jìn)制數(shù),則實(shí)際載波頻率fc為:fc= 
式中fk為外部時(shí)鐘頻率。
②輸出電源頻率范圍選擇
R0中的FRS字稱為電源頻率范圍選擇字,設(shè)m為與FRS字相對(duì)應(yīng)的十進(jìn)制數(shù),則實(shí)際的輸出電源頻率fr范圍為:fr= 
③脈沖延遲時(shí)間選擇
R2中的PDY字為脈沖延遲時(shí)間選擇字,設(shè)x為與PDY字相對(duì)應(yīng)的十進(jìn)制值,則實(shí)際的脈沖延遲時(shí)間Tpdy由下式確定:Tpdy= 
④脈沖取消時(shí)間選擇
R1中的PDT字為脈沖取消時(shí)間選擇字,設(shè)y為與PDT字相對(duì)應(yīng)的十進(jìn)制值,則實(shí)際的脈沖取消時(shí)間Tpdt由下式確定:Tpdt= 
應(yīng)該指出的是,由于脈沖延遲電路跟在脈沖刪除電路之后(見圖3),故輸出的PWM脈沖的實(shí)際最小寬度將比設(shè)定的脈沖取消時(shí)間為窄,這個(gè)實(shí)際的最小脈沖寬度為TpdtTpdy。
⑤波形選擇
R3中的WS1、WS0兩位用于確定輸出的電源波形,詳見表3。波形可由具體的數(shù)學(xué)表達(dá)式來表示,具體的形狀見圖4。
表3 WS1、WSO確定的輸出電源波形

圖4 SA4828的內(nèi)部調(diào)制波形
(a)正弦波(b)基波加三次諧波(c)帶有死區(qū)的基波加三次諧波
⑥幅值控制(AC)
R3中的幅值控制位(AC)定義了三相波形幅值的受控方式。當(dāng)AC=0(芯片默認(rèn)值)時(shí),控制寄存器內(nèi)紅色相幅值,寄存器用于控制所有三相調(diào)制頻率的幅值。而當(dāng)AC=1時(shí),采用三個(gè)獨(dú)立的幅值寄存器分別控制對(duì)應(yīng)相調(diào)制頻率的幅值。
⑦計(jì)數(shù)器復(fù)位(CR)
當(dāng)R3中的計(jì)數(shù)器復(fù)位CR=1時(shí),紅色相相位計(jì)數(shù)器設(shè)置為0,此時(shí)禁止正常的頻率控制操作,每一相輸出占空比為50%的脈沖.
⑧軟件復(fù)位(RST)
R3中的RST=1時(shí),將整個(gè)芯片復(fù)位為初始化默認(rèn)狀態(tài),它的效果與硬件復(fù)位腳RST等同。
(2)控制寄存器的編程
控制寄存器是一個(gè)48位寄存器,控制寄存器的數(shù)據(jù)以8位為一個(gè)單元分別讀入臨時(shí)寄存器R0~R5中,然后通過寫虛擬寄存器R15將R0~R5中的數(shù)據(jù)傳送到控制寄存器。其內(nèi)容如表4所示。
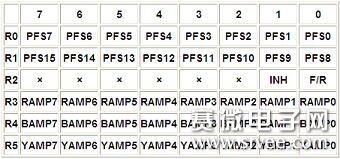
①電源頻率選擇
輸出電源頻率可在最大電源頻率范圍內(nèi)線性地調(diào)節(jié),它由一個(gè)16位的電源頻率選擇字"PFS"決定,整個(gè)電源頻率范圍被劃分為65536等分。由于PFS字跨 越兩個(gè)臨時(shí)寄存器R0、R1,所以當(dāng)改變輸出電源頻率時(shí),必須在寫虛似寄存器R15之前同時(shí)刷新這兩個(gè)臨時(shí)寄存器的值。
電源頻率fp由下式?jīng)Q定: fp=Pfs
fp=Pfs
式中:Pfs為16位PFS選擇字的十進(jìn)制值。
②電源幅值選擇
輸出電源的幅值正比于內(nèi)部ROM中的采樣值和8位幅值選擇字(RAMP、BAMP、YAMP)的值。幅值的百分比計(jì)算公式如下: APOWER=100%
APOWER=100%
式中:A為8位幅值選擇字的十進(jìn)制值。
值得注意的是,初始化寄存器中的幅值控制位(AC)決定了紅色相幅值寄存器的值是否用于控制所有的三相輸出幅值。
③正/反轉(zhuǎn)選擇
三相PWM輸出的相位決定于R2中的F/R選擇位:
F/R=0正轉(zhuǎn)相序?yàn)榧t黃蘭;
F/R=1反轉(zhuǎn)相序?yàn)樘m黃紅。
在正反轉(zhuǎn)切換時(shí),輸出波形仍保持連續(xù)。
④輸出禁止選擇
當(dāng)R2中的輸出禁止位(INH)有效(為1)時(shí),所有的PWM輸出變?yōu)榈碗娖綘顟B(tài),而芯片內(nèi)部其他操作并不受影響。該位被釋放后所有的輸出立即恢復(fù)原狀。
需要注意的是,輸出禁止電路在脈沖刪除和脈寬延遲電路之后,因此在輸出禁止的初期有可能產(chǎn)生一些過窄的脈沖。
3.4SA4828芯片編程實(shí)例
本例的變頻器采用12.288MHz時(shí)鐘。初始化寄存器設(shè)計(jì)的具體參數(shù)如下:
載波頻率3kHz
電源頻率15Hz
脈沖取消時(shí)間10μs
脈寬延遲時(shí)間5μs
電源波形抑制了三次諧波的波形
幅值控制三相幅值對(duì)稱
(1)初始化寄存器編程實(shí)例
①設(shè)定載波頻率由fc= 得2n=
得2n= =8
=8
則n=3R0中的CFS字為011H
②設(shè)定輸出電源頻率范圍由fr=2m 得2m=
得2m= =2
=2
則m=1,R0中的FRS字為001H。
③設(shè)定脈寬延遲時(shí)間由Tpdy= =5μs
=5μs
可得x=64- (Tpdy×fc×512)=56.32
取整數(shù)56,則R2中的6位PDY字為111000H
④設(shè)定脈沖取消時(shí)間
由于實(shí)際輸出PWM脈沖的最小脈寬為TpdtTpdy,所以在設(shè)定最小脈沖取消時(shí)間時(shí),應(yīng)加上脈寬延遲時(shí)間。
因此在本例中實(shí)際最小脈沖寬度應(yīng)為10μs+5μs=15μs由Tpdt= 
可得y=128- (Tpdt×fc×512)
=128-(15.2×10-6×3×103×512)
≈104.65
取整數(shù)104,則R1中的PDT值為01101000H
⑤設(shè)定波形選擇,幅值控制等
選 擇輸出波形為基波加三次諧波,故WS1=0,WS0=1,無用戶輸出選擇,故OPT1=0, OPTO="0"。設(shè)定幅值控制位AC=0,選擇三相平衡幅值控制方式,正常工作時(shí)計(jì)數(shù)器復(fù)位和軟件復(fù)位均無效,故 CR="RST"=0。所以R3中的二進(jìn)制代碼為00000001。綜上所述,初始化寄存器中:
R0=0010001123H
R1=0110100068H
R2=0011100038H
R3=0000000101H
(2)控制寄存器編程實(shí)例
根 據(jù)治療儀控制的具體要求,變頻器輸出頻率最高不超過10Hz,相應(yīng)電機(jī)轉(zhuǎn)速為280r/min。由于輸出頻率需要隨時(shí)調(diào)整,利用80C196KC單片機(jī)的 模擬量輸入通道CH0,輸入經(jīng)5.1kΩ電阻和10kΩ電位器將+5V電源電壓分壓后提供的電壓信號(hào)。80C196KC的模擬量轉(zhuǎn)換為10位精度,給分壓 電位器提供的最高電壓約3.3V左右,采樣碼為680。由于SA4828的輸出電源頻率精度為16位,必須將10位采樣值左移6位,然后將其低位送入臨時(shí) 寄存器R0,高位則送入R1。
由于采用VVVF控制,幅值與電源頻率成正比,可得頻率設(shè)定電位器的采樣值,A×15/50,再右移2位后送入臨時(shí)寄存器R3。由于采用三相平衡幅值,R4、R5可以不賦值。
輸出禁止無效,故INH=0,正反轉(zhuǎn)F/R是周期性改變的,開始半擺為正轉(zhuǎn),F(xiàn)/R=0,故R2=0,以后每次要改變方向時(shí),將R2的D0位取反即可。
擺幅控制則可通過一只10kΩ電位器將+5V電源電壓分壓后送入80C196KC的模擬量輸入通道CH1實(shí)現(xiàn)。
4治療儀控制功能的實(shí)現(xiàn)
4.1失速控制
通過將SA4828的最高調(diào)制頻率設(shè)定為10Hz,其轉(zhuǎn)速為280r/min,稍高于250r/min,留有一定的調(diào)節(jié)余量。
4.2擺幅控制
當(dāng)電機(jī)以最高轉(zhuǎn)速250r/min旋轉(zhuǎn)時(shí),經(jīng)1/50減速器后,轉(zhuǎn)速為5r/min=1800°/min=30°/s。100°/(30°/s)=3.33s。200°/(30°/s)=6.67s。若以100ms為控制周期,則全擺幅周期T為:T=67× 
式中:t為擺幅輸入采樣值;
f則為轉(zhuǎn)速輸入采樣值。
剛開始的第一次擺動(dòng)應(yīng)從中間開始正轉(zhuǎn),故T1=T/2。經(jīng)過以上處理,就將位置控制變成了定時(shí)時(shí)間控制,不僅省去了不易調(diào)整的位置開關(guān),也使轉(zhuǎn)速及擺幅的控 制方便多了。通過兩只電位器就可實(shí)現(xiàn)快速、便捷的控制。停車時(shí),由操作人員根據(jù)目測(cè),到中心位置時(shí)按下轉(zhuǎn)/停開關(guān)即可準(zhǔn)確停車,且每次轉(zhuǎn)動(dòng)時(shí)均從中心位置 開始正轉(zhuǎn)半幅,然后全幅往復(fù)運(yùn)行。由于通過SA4828實(shí)現(xiàn)了0Hz直流制功,即實(shí)現(xiàn)了準(zhǔn)確停車,又不會(huì)將電機(jī)制動(dòng)時(shí)產(chǎn)生的再生能量反饋回直流環(huán)節(jié)的極性 電容,避免了泵升電壓的產(chǎn)生。
5結(jié)論
(1)用SA4828設(shè)計(jì)的變頻器,接口簡(jiǎn)單,功能強(qiáng),控制精度高,使用方便,能構(gòu)成高性能的變頻調(diào)速系統(tǒng),SA系列PWM控制器在變頻調(diào)速領(lǐng)域具有很好的應(yīng)用前景。
(2)16位單片機(jī)控制提高了系統(tǒng)的智能化,控制速度快,系統(tǒng)性能改變方便,控制、保護(hù)、人機(jī)界面功能強(qiáng)。
(3)通過在醫(yī)學(xué)治療儀上的實(shí)際應(yīng)用證明,變頻控制系統(tǒng)工作安全可靠,頻率控制精度及穩(wěn)定度高,輸出諧波含量小,低速運(yùn)行特性好,起動(dòng)轉(zhuǎn)矩大,停車準(zhǔn)確、迅速。轉(zhuǎn)速及擺幅調(diào)節(jié)極其方便。作為特殊應(yīng)用的專用變頻器設(shè)計(jì),具有推廣價(jià)值。