
摘要:飛行試驗振動信號具有采樣率高、數(shù)據(jù)量大、處理復雜的特點,在現(xiàn)有條件下,通過遙測鏈路很難將大量的振動數(shù)據(jù)實時傳輸至地面監(jiān)控系統(tǒng)。針對試飛測試的需要,結合某型號的試飛關鍵技術攻關研究,突破試飛振動數(shù)據(jù)實時處理系統(tǒng)的一些關鍵技術,對被試飛機的振動信號進行實時分析,將分析結果實時發(fā)送至地面監(jiān)控系統(tǒng),以減小遙測傳輸帶寬,真正實現(xiàn)高采樣信號振動數(shù)據(jù)的遙測實時監(jiān)控。
關鍵詞:試飛測試;FPGA;實時監(jiān)控;振動處理
0 引言
在飛行試驗過程中,飛行試驗安全監(jiān)控對飛行試驗的安全起著至關重要的作用。飛行試驗本身具有相當?shù)娘L險性,危及飛機和試飛員安全的因素錯綜復雜、涉及面廣,不但包含飛機本身的因素,還包括許多外界條件。由于不安全事件的突發(fā)性,往往使得試飛員、地面指揮員、機務人員、安全救護員等不能做出及時響應。特別是近幾年隨著航空技術的飛速發(fā)展,飛機的結構日趨復雜,其結構強度、可靠性問題也日益突出,帶來的問題是飛機故障率增高、維護難度加大。而結構強度問題90%是由振動導致或與振動有關。振動出現(xiàn)異常,其結果輕則引起飛行員情緒緊張影響操作;重則損傷機器部件,減少使用壽命,甚至危及飛行安全。
由于振動信號具有采樣率高、數(shù)據(jù)量大、處理復雜的特點,通過遙測數(shù)據(jù)處理系統(tǒng)很難傳輸大量的振動參數(shù)。近幾年對振動信號實時監(jiān)控技術進行了一定的探索和研究,通過遙測鏈路將機載振動數(shù)據(jù)傳到地面,在地面遙測數(shù)據(jù)處理站對數(shù)據(jù)進行分析和實時監(jiān)控。由于前期所作的研究受到各種條件的限制,效果不太理想,因此結合某型號試飛測試的需要,在關鍵技術攻關項目中通過對振動信號進行機上的實時數(shù)據(jù)分析,將分析結果實時發(fā)送至地面監(jiān)控系統(tǒng),以減小遙測傳輸帶寬,真正實現(xiàn)振動信號的遙測實時監(jiān)控。
1 國內外所采用的方法分析
縱觀國外飛機試飛情況,無論是空客的A380,A330,A400M還是波音787,在試飛過程中都非常重視振動參數(shù)的測量,為了使得飛機的各部位振動指標滿足設計要求,在飛機設計的時候就已經在地面建設了“地面振動測試系統(tǒng)”。而對于試飛驗證階段的振動監(jiān)控更加重視,通過專用的振動、應變實時處理系統(tǒng)對所關心的振動點進行實時監(jiān)測。
我院在研制某型直升機傳動系統(tǒng)振動試飛實時數(shù)據(jù)處理系統(tǒng)時,采用軟件技術對振動信號進行了分析處理,可以實時處理2路振動參數(shù),基本解決了該飛機試飛振動數(shù)據(jù)實時處理需求,但是由于遙測帶寬的限制,導致還有一部分振動參數(shù)被取消或降低需求,另外通過遙測傳輸和軟件處理也存在跳點多、時間延遲大的問題。
2 基于POWER PC+FPGA架構的實時分析系統(tǒng)
據(jù)估計,在某型運輸機試飛中,振動、應變參數(shù)將多達數(shù)百個,需要實時監(jiān)控的參數(shù)有數(shù)十路。按照傳統(tǒng)的技術和方法,無法滿足該型號飛機試飛對振動信號實時處理的要求。針對該型號的試飛需求,在該型號關鍵技術攻關項目中提出了采用嵌入式處理器+FPGA架構來設計振動信號機載實時處理單元,在機上實現(xiàn)實時數(shù)據(jù)的工程量轉換、信號實時分析處理及高速存儲,將處理結果重新編碼后送機載測試系統(tǒng)遙測發(fā)送,最終實現(xiàn)振動信號的地面遙測實時監(jiān)控。
2.1 硬件系統(tǒng)設計
2.1.1 硬件工作原理
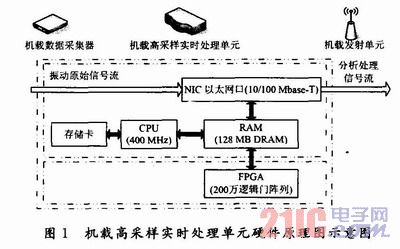
硬件部分包括機載高采樣實時處理單元硬件和地面遙測分析單元硬件,前者主要由嵌入式計算機、FPGA分析單元和系統(tǒng)配置裝置構成,后者是一臺數(shù)據(jù)分析工作站。嵌入式計算機選用400 MHz處理器芯片,10/100 MBase-T以太網口,配以200萬FPGA邏輯門陣列用于實現(xiàn)對振動信號采集、處理、分析等工作,系統(tǒng)配置裝置采用筆記本電腦通過網絡接口完成對機載高采樣實時處理單元的系統(tǒng)配置。振動原始信號流由以太網口輸入,嵌入式系統(tǒng)完成振動數(shù)據(jù)流的解包后將數(shù)據(jù)通過DMA方式直接傳輸至FPGA實時處理芯片,由FPGA模塊完成實時在線的振動數(shù)據(jù)分析處理工作:工程量轉換、頻譜分析、時域統(tǒng)計量計算等,分析處理完后通過DMA方式傳送至嵌入式計算機的DRAM中,嵌入式計算機完成數(shù)據(jù)存儲和數(shù)據(jù)發(fā)送工作。硬件原理示意圖如圖1所示。
2.1.2 接口設計
振動信號的信號電纜、供電電源電纜接口設計按符合MIL-C-38999 I系列航空電連接器設計。提供信號電纜的接口、電源接口以及網絡接口。所有接口以航空電連接器的形式提供。
2.1.3 核心硬件設計
(1)硬件核心邏輯原理結構
系統(tǒng)硬件核心部分由400 MHz處理器芯片,200萬門FPGA芯片及以太網接口芯片及串行通信芯片組成。系統(tǒng)硬件邏輯結構、輸出硬件數(shù)據(jù)流邏輯原理設計及元件組成如圖2所示。
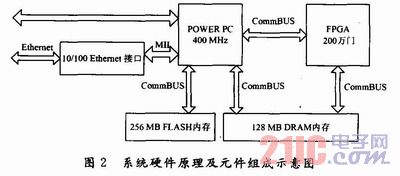
(2)功能
POWER PC核心CPU,內置VxWorks實時操作系統(tǒng),負責系統(tǒng)網絡接口、串行通信接口。Xilinx FPGA芯片,完成自定義FFT頻譜分析及實時信號分析算法。
2.2 實時處理系統(tǒng)軟件設計
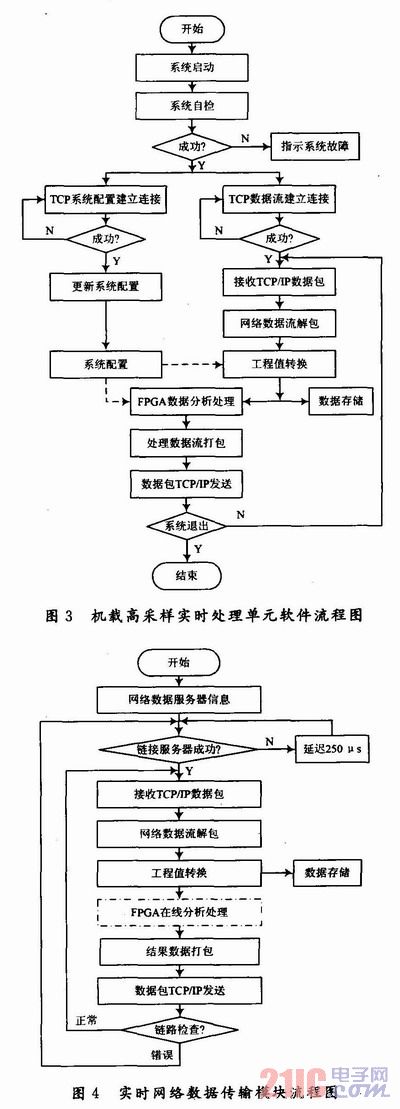
機載振動數(shù)據(jù)實時處理單元開機后,軟件自動運行,首先完成系統(tǒng)的自檢,判斷系統(tǒng)的工作狀態(tài),如果正常則進行下一步工作,同時將設備面板的“工作正常”指示燈閃爍,反之不閃爍。系統(tǒng)正常后,軟件進入循環(huán)連續(xù)的數(shù)據(jù)接收、分析處理與存儲程序,同時處理后的信號發(fā)送至機載數(shù)據(jù)網絡。
高采樣實時處理單元軟件在實時操作系統(tǒng)下運行,使用NI公司的圖形化編程語言LabVIEW RT、高級信號處理包、噪聲振動信號處理包和基于賽靈思公司Xilinx ISE FPGA開發(fā)模塊編制完成。機載高采樣實時處理單元配置軟件全部操作采用圖形化的人機界面,能方便、直接、快速完成機載系統(tǒng)的配置。
機載高采樣實時處理單元軟件流程如圖3所示。
軟件采用模塊化設計的思想,以功能來劃分各個不同的子模塊,主要子模塊完成的功能及實現(xiàn)方法描述如下:
2.2.1 實時網絡數(shù)據(jù)傳輸模塊設計
實時網絡數(shù)據(jù)傳輸模塊運用于機載高采樣實時處理單元中,完成基于實時系統(tǒng)的網絡數(shù)據(jù)接收及發(fā)送工作。
實時網絡數(shù)據(jù)傳輸模塊程序算法及邏輯流程圖如圖4所示。
2.2.2 振動數(shù)據(jù)網絡數(shù)據(jù)流解包打包模塊設計
該模塊運用于機載高采樣實時處理單元中,依據(jù)任務需求,本系統(tǒng)可同時完成12個動態(tài)通道的振動數(shù)據(jù)接收和解包,同時兼顧將分析處理結果按輸入的數(shù)據(jù)格式輸出。
振動數(shù)據(jù)流解包打包模塊算法及流程圖如圖5所示。

2.2.3 實時振動分析處理模塊設計
由板載的FPGA邏輯門陣列完成基于硬件級的數(shù)據(jù)分析處理工作:數(shù)據(jù)工程量轉換、可任意選擇不小于12通道,由板載FPGA完成自定義頻率分辨率實時振動頻譜分析;由板載PFGA完成自定義多個關鍵單頻點、頻域帶通范圍振動能量及時域統(tǒng)計量分析。
實時振動分析處理模塊流程及算法如圖6所示。
時域參數(shù)分析處理算法實現(xiàn):提取原始振動信號的有效值、峰值、峭度、峰值指標、裕度指標和脈沖指標等,最能反映飛機飛行振動狀態(tài)的時域指標。
2.2.4 實時數(shù)據(jù)存儲模塊設計
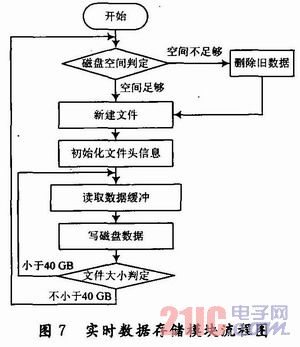
實時數(shù)據(jù)存儲模塊運用于機載高采樣實時處理單元中,用于存儲在測試過程中記錄的振動數(shù)據(jù),根據(jù)測試需求用于存儲數(shù)據(jù)的空間不小于4 GB。
實時數(shù)據(jù)存儲模塊算法及流程圖如圖7所示。
2.2.5 配置及數(shù)據(jù)導出模塊設計
通過網絡接口,配置及數(shù)據(jù)導出模塊完成對機載高采樣實時處理單元的系統(tǒng)設置工作:選擇遙測分析的通道、設定頻帶范圍、譜線精度、時域統(tǒng)計參數(shù)配置以及系統(tǒng)設置的各項配置參數(shù);選擇需要導出的數(shù)據(jù)文件,完成數(shù)據(jù)導出工作。
配置及數(shù)據(jù)導出模塊算法及流程圖如圖8所示。

頻域分析設置圖形用戶接口界面如圖9所示。

數(shù)據(jù)顯示模塊圖形用戶接口界面如圖10所示。
3 關鍵技術
可靠實時的完成高速振動PCM流信號的接收、解包、分析和存儲成為機載高采樣實時處理單元需要解決的關鍵性技術,地面遙測分析單元的關鍵在于如何運用有效的數(shù)據(jù)處理方法對采集的數(shù)據(jù)進行分析,從而得出可信有效的振動分析結果。在該處理單元的研制中,突破了以下幾方面的關鍵技術。
3.1 基于實時系統(tǒng)高速振動數(shù)據(jù)流信號的輸入輸出技術
由嵌人式實時系統(tǒng)完成高速振動網絡數(shù)據(jù)流信號的接收及處理數(shù)據(jù)流的發(fā)送,在網絡帶寬允許的情況下,嵌入式實時系統(tǒng)精確的定時精度保證了基于網絡數(shù)據(jù)傳輸?shù)目煽啃耘c可快速性。
3.2 基于FPGA平臺的多通道實時并行頻譜計算及數(shù)據(jù)分析技術
由于采用基于FPGA邏輯門陣列為數(shù)據(jù)處理平臺,從而確保系統(tǒng)整個數(shù)據(jù)處理時間在微秒級的量級,從而保證大批量數(shù)據(jù)處理不會成為系統(tǒng)的瓶頸,保證了系統(tǒng)的實時性。
3.3 振動信號分析處理技術
通過使用各種頻域分析、時域分析及時頻域分析技術,同時結合型號試飛的需求以及在振動分析處理方面積累的經驗和分析處理方法,形成了滿足飛行試驗振動數(shù)據(jù)分析方法。
4 結語
飛行試驗振動信號實時監(jiān)控迄今為止僅在某型直升機槳葉測振中進行,而且效果很不理想。本文所采用的方法可以實現(xiàn)多路信號的實時監(jiān)控,而且可以針對不同科目的不同需求,在飛行前進行配置加載,同時還能夠實現(xiàn)算法的選擇、通道數(shù)量的選擇以及所監(jiān)控數(shù)據(jù)的結果形式的選擇。該項目不僅使用于飛行試驗振動數(shù)據(jù)的實時監(jiān)控,同時可以擴展到航天、艦船以及航空工業(yè)其他領域中。作為裝機的機載測試設備,工程化后還能夠為試飛院帶來經濟效益。