1 引言
隨著發(fā)射臺信息化建設(shè)的深入開展,為了實現(xiàn)發(fā)射機房監(jiān)控" title="機房監(jiān)控">機房監(jiān)控系統(tǒng)的全自動化" title="全自動化">全自動化控制,我臺丙機房5部150kW短波發(fā)射機" title="短波發(fā)射機">短波發(fā)射機新建了天線" title="天線">天線自動控制系統(tǒng)。天線控制系統(tǒng)作為發(fā)射機房監(jiān)控系統(tǒng)的一個子系統(tǒng),可以受遠(yuǎn)端監(jiān)控機房的控制,為機房監(jiān)控系統(tǒng)提供天線控制接口和數(shù)據(jù)上傳接口;能夠提供手動方式或自動方式,獨立完成對天線同軸開關(guān)和場地轉(zhuǎn)換開關(guān)的切換控制;自動狀態(tài)下,天控系統(tǒng)根據(jù)運行時間表自動倒換工作;可以對天線的控制操作和故障進行記錄、統(tǒng)計和查詢;同時可以完成對天線、假負(fù)載工作狀態(tài)的監(jiān)測。下面對我機房的天線自動控制系統(tǒng)作一簡要介紹。
2 天線自動控制系統(tǒng)的基本結(jié)構(gòu)
天線自動控制系統(tǒng)采用了工業(yè)控制計算機加帶光耦隔離的DI/O板的設(shè)計方案。帶光耦隔離的DI/O板主要由若干個光電耦合器組成,可以使天線自動控制單元與受控對象之間進行電隔離,確保系統(tǒng)工作的穩(wěn)定性。其中,工控機采用研華原裝IPC-610(P42.8G,512M,80G硬盤,comb光驅(qū),10/100M自適應(yīng)網(wǎng)卡),17寸工業(yè)觸摸屏顯示器作為顯示終端;開關(guān)量輸入采用研華PCI-1752(64路入PC104總線輸入板),輸出卡采用研華PCI-1754(64路出PC104總線輸出板)。
2.1 系統(tǒng)組成
天線自動控制系統(tǒng)主要包括硬件和軟件兩個部分。
硬件系統(tǒng)包括如下三個部分:
(1)管理控制中心:主要由工控機和DI/O卡構(gòu)成(含觸摸屏、鼠標(biāo)、鍵盤等外圍設(shè)備)。
(2)天線控制和狀態(tài)采樣單元:主要由控制和采樣電路構(gòu)成。
(3)受控單元:主要由同軸開關(guān)和場地開關(guān)組成。
軟件系統(tǒng)用LABVIEW語言進行編寫,主要包含:自動運行、手動運行、數(shù)據(jù)記錄等。
2.2 系統(tǒng)控制原理
圖 1為天線自動控制系統(tǒng)控制原理框圖。該系統(tǒng)由工業(yè)控制計算機對系統(tǒng)進行管理和控制,控制時,由軟件系統(tǒng)通過DI/O卡對控制電路發(fā)出控制指令,控制電路根據(jù)控制指令對執(zhí)行單元(受控對象:同軸開關(guān)和場地開關(guān))進行相應(yīng)控制動作,從而使天線轉(zhuǎn)到被指定的相應(yīng)位置;同時,采樣電路對受控對象的開關(guān)狀態(tài)進行采樣,通過DI/O卡反饋給工業(yè)控制計算機。
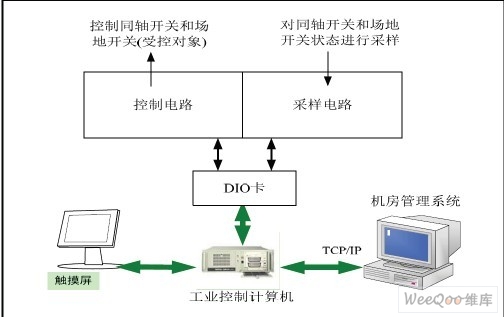
圖1 天線自動控制系統(tǒng)控制原理框圖
3 硬件控制部分
3.1 受控對象的位置關(guān)系
天線自動控制系統(tǒng)的受控對象主要是同軸開關(guān)和場地開關(guān),它們均受控于控制電路。圖2為同軸開關(guān)(KT)和場地開關(guān)(K)控制原理圖。
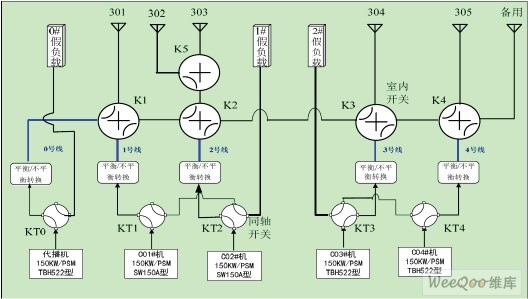
圖2 同軸開關(guān)(KT)和場地開關(guān)(K)控制原理圖
同軸開關(guān)KT0-KT4有兩種工作狀態(tài),即:天線位和假負(fù)載位。天線位表示發(fā)射機連接到對應(yīng)天線上;假負(fù)載位表示發(fā)射機連接到對應(yīng)假負(fù)載上。場地開關(guān)K1、K2、K3、K4、K5也有兩種工作狀態(tài),即:直通![]() 和轉(zhuǎn)向
和轉(zhuǎn)向![]() ,直通
,直通![]() 表明此時場地開關(guān)按照十字直接接通天線;轉(zhuǎn)向
表明此時場地開關(guān)按照十字直接接通天線;轉(zhuǎn)向![]() 表明此時場地開關(guān)按照轉(zhuǎn)向方向接通天線。代播機可以使用任何一副天線,C01機、C02機、CO3機、C04機除了能接通本機天線外,只能依次使用下一級天線,即:C01機可接通301、302、303、304、305、備用天線;C02機可接通302、303、304、305、備用天線;C03機可接通 304、305、備用天線;C04機可接通305、備有天線。
表明此時場地開關(guān)按照轉(zhuǎn)向方向接通天線。代播機可以使用任何一副天線,C01機、C02機、CO3機、C04機除了能接通本機天線外,只能依次使用下一級天線,即:C01機可接通301、302、303、304、305、備用天線;C02機可接通302、303、304、305、備用天線;C03機可接通 304、305、備用天線;C04機可接通305、備有天線。
3.2 同軸開關(guān)控制及采樣電路
3.2.1 功能:
(1)完成對同軸開關(guān)的控制。
(2)實現(xiàn)天線位和假負(fù)載位的硬件閉鎖。
(3)完成對同軸開關(guān)位置狀態(tài)的采樣。
(4)完成發(fā)射機是否加高壓的判斷。
(5)完成對假負(fù)載開關(guān)是否打開的判斷。
3.2.2 同軸開關(guān)的控制及采樣電路原理
圖 3為同軸開關(guān)KT0-KT4控制及采樣原理,圖4為同軸開關(guān)控制示意圖。同軸交換開關(guān)內(nèi)部的驅(qū)動電機為220VAC控制。在圖3中,A繼電器為天線到位控制繼電器,C繼電器為天線到位采樣繼電器;B繼電器為假負(fù)載到位控制繼電器,D繼電器為假負(fù)載到位采樣繼電器。A、B、C、D繼電器均為24VDC控制。
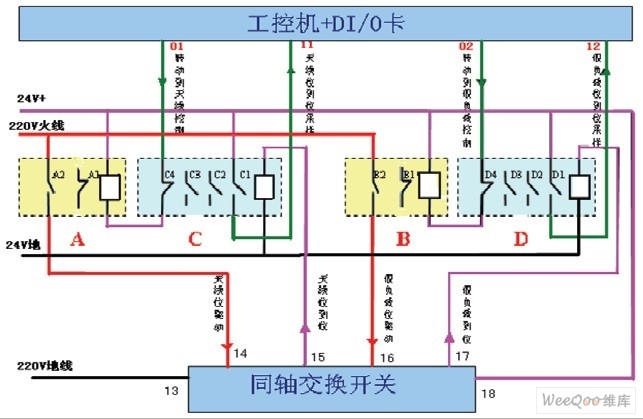
圖3同軸開關(guān)KT0-KT4控制及采樣原理
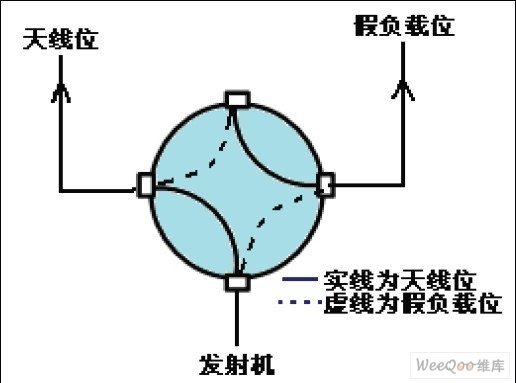
圖4 同軸開關(guān)控制示意圖
(1)天線到位控制及采樣
當(dāng)同軸開關(guān)需要轉(zhuǎn)向天線位時,工控機01端將發(fā)出一個低電平指令,通過C繼電器常閉接點C4送到A繼電器線包的下端,A繼電器得電后,其常開接點A2接通,220VAC控制電壓被送到同軸交換開關(guān)的14端,同軸開關(guān)驅(qū)動電機被加電,開始轉(zhuǎn)動(見圖4),當(dāng)同軸開關(guān)與天線連接到位后,同軸交換開關(guān)15端送出24V的天線到位的信息指令到C繼電器線包的上端,C繼電器得電吸合,C繼電器常閉接點C4斷開,A繼電器線包失電立即斷開,其常開接點A2斷開,同軸開關(guān)驅(qū)動電機斷電,同時,C繼電器常開接點C1接通,將+24V天線到位的采樣信號送給工控機DI/O卡的11端,到此,天線到位控制完成。
(2)假負(fù)載到位控制及采樣
當(dāng)同軸開關(guān)需要轉(zhuǎn)向假負(fù)載位時,工控機02端將發(fā)出一個低電平指令,通過D繼電器的常閉接點D4送到B繼電器線包的下端,B機電器得電后,其常開接點B2接通,220VAC控制電壓被送到同軸交換開關(guān)的16端,同軸交換開關(guān)驅(qū)動電機被加電,開始轉(zhuǎn)動(見圖4);當(dāng)同軸開關(guān)與假負(fù)載連接到位后,同軸開關(guān)17端送出24V的假負(fù)載到位的信息指令到D繼電器線包的上端,D繼電器得電吸合,D繼電器常閉接點D4斷開,B繼電器線包失電立即斷開,其常開接點B2斷開,同軸開關(guān)驅(qū)動電機斷電,同時,D繼電器常開接點D1接通,將+24V假負(fù)載到位的采樣信號送給工控機DI/O卡12端,到此,假負(fù)載到位控制完成。
3.3 場地開關(guān)控制及采樣電路
3.3.1 功能
(1)完成對場地開關(guān)的控制。
(2)實現(xiàn)硬件閉鎖功能。
(3)完成對場地開關(guān)位置狀態(tài)的采樣。
3.3.2 場地開關(guān)的控制及采樣電路原理
圖5為場地交換開關(guān)K1-K5控制及采樣原理,圖6為場地開關(guān)轉(zhuǎn)向控制示意圖,圖7為場地開關(guān)直通控制示意圖。同軸交換開關(guān)內(nèi)部的驅(qū)動電機為220VAC控制。
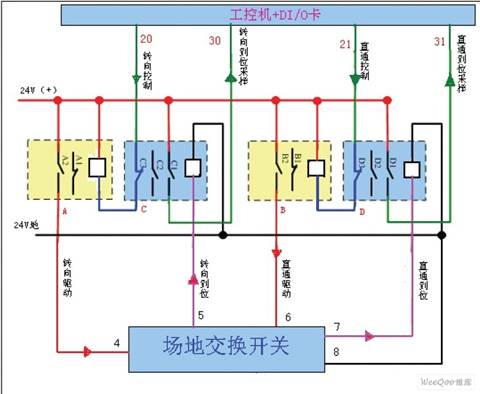
圖5 場地交換開關(guān)K1-K5控制及采樣原理
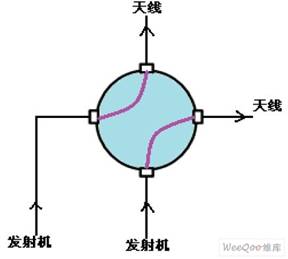
圖6 場地開關(guān)轉(zhuǎn)向控制示意圖
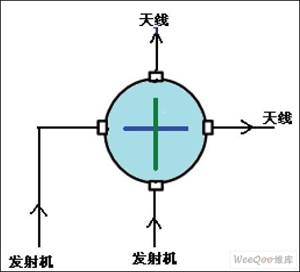
圖7 場地開關(guān)直通控制示意圖
在圖5中,A繼電器為場地開關(guān)轉(zhuǎn)向控制繼電器,C繼電器為場地開關(guān)轉(zhuǎn)向到位采樣繼電器;B繼電器為場地開關(guān)直通控制繼電器,D繼電器為場地開關(guān)直通到位采樣繼電器。A、B、C、D繼電器和場地開關(guān)均為24VDC控制。
(1)轉(zhuǎn)向驅(qū)動控制及采樣
當(dāng)場地開關(guān)處在直通位置,需要向轉(zhuǎn)向位轉(zhuǎn)動時,工控機20端發(fā)出一個低電平指令,經(jīng)C繼電器常閉接點C3,加到A繼電器線包的下端,A繼電器的電后,其常開接點A2接通,+24V控制電壓被加到場地交換開關(guān)的4端,場地開關(guān)驅(qū)動電機得電運轉(zhuǎn)(見圖6、圖7);當(dāng)場地開關(guān)由直通位轉(zhuǎn)到轉(zhuǎn)向位到位后,場地交換開關(guān)的5端送出24V高電平的到位信息指令,并加到C繼電器線包的下端,C繼電器得電吸合,其常閉接點C3斷開,使A繼電器失電,立即斷開,A繼電器常開接點A2斷開,場地開關(guān)驅(qū)動電機24V斷電,同時,C繼電器常開接點C1接通,將24V轉(zhuǎn)向到位信息的采樣信號送給工控機DI/O卡30端,轉(zhuǎn)向驅(qū)動控制完成。
(2)直通驅(qū)動控制及采樣
當(dāng)場地開關(guān)處在轉(zhuǎn)向位置,需要向直通位轉(zhuǎn)動時,工控機21端發(fā)出一個低電平指令,經(jīng)D繼電器常閉接點D3,加到B繼電器線包的下端,B繼電器的電后,其常開接點B2接通,+24V控制電壓被加到場地交換開關(guān)的6端,場地開關(guān)驅(qū)動電機得電運轉(zhuǎn)(見圖6、圖7);當(dāng)場地開關(guān)由轉(zhuǎn)向位轉(zhuǎn)到直通位到位后,場地交換開關(guān)的7端送出24V高電平的到位信息指令,并加到D繼電器線包的下端,D繼電器得電吸合,其常閉接點D3斷開,使B繼電器失電,立即斷開,B繼電器常開接點B2斷開,場地開關(guān)驅(qū)動電機24V斷電,同時,D繼電器常開接點D1接通,將24V 直通到位信息的采樣信號送給工控機DI/O卡31端,直通驅(qū)動控制完成。
3.4 系統(tǒng)安全措施
(1)發(fā)射機加高壓時,其對應(yīng)的所有開關(guān)不允許切換。
(2)發(fā)射機應(yīng)在天線位,而天線轉(zhuǎn)動未到位時;發(fā)射機應(yīng)在假負(fù)載位,而假負(fù)載轉(zhuǎn)動未到位時,發(fā)射機不能加高壓。
(3)由于閉鎖信號不到位,發(fā)射機不能加高壓,因此系統(tǒng)需要判斷每部發(fā)射機是否加高壓、判斷天線或假負(fù)載是否轉(zhuǎn)動到位。
(4)為確保發(fā)射機加高壓安全,系統(tǒng)設(shè)計有硬件和軟件閉鎖信號,硬件閉鎖由場地開關(guān)和同軸開關(guān)給出,軟件閉鎖信號由系統(tǒng)給出,當(dāng)滿足加高壓條件時,軟件系統(tǒng)給出軟件閉鎖信號,當(dāng)軟件和硬件閉鎖信號都滿足時,系統(tǒng)才能加高壓。
4 系統(tǒng)軟件
系統(tǒng)軟件的設(shè)計是利用工業(yè)控制計算機平臺,以完成天線控制系統(tǒng)的全部功能為目的,本著操作簡單、實用,界面友好、美觀進行的。
4.1 軟件系統(tǒng)功能
天線自動交換系統(tǒng)功能結(jié)構(gòu)圖如圖8所示。
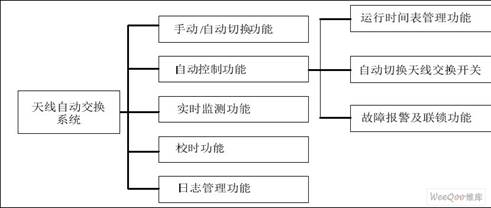
圖8 天線自動交換系統(tǒng)功能結(jié)構(gòu)圖
天線自動交換系統(tǒng)的功能如下:
(1)天線自動交換系統(tǒng)實現(xiàn)對天線交換開關(guān)的自動切換功能,確定發(fā)射機需要連接的天線或假負(fù)載。天線交換開關(guān)的控制包括:手動操作、電動控制和自動控制三種模式。
手動操作:使用機械方式切換天線交換開關(guān)。(此時系統(tǒng)不應(yīng)在自動模式,并有相應(yīng)的措施切斷驅(qū)動電源,保護設(shè)備和人身安全,但監(jiān)測依然有效。)電動控制:在控制柜或控制面板上,通過人為控制電動開關(guān),實現(xiàn)對天線交換開關(guān)的切換。
自動控制:根據(jù)運行時間表,以定時時間脈沖為切換依據(jù)實現(xiàn)天線交換開關(guān)的自動控制。
(2)自動化系統(tǒng)工作模式之間的相互切換,在上位機的屏幕上選擇,相互切換后,必須保持原天線交換系統(tǒng)的運行狀態(tài)。
(3)自動運行時,系統(tǒng)自動接收遠(yuǎn)程機房下發(fā)的運行圖并依據(jù)運行圖進行工作。
(4)手動運行時,系統(tǒng)管理員可直接修改本監(jiān)控系統(tǒng)的運行圖,完成系統(tǒng)控制;權(quán)限管理員也可對系統(tǒng)各個控制開關(guān)的狀態(tài)進行編輯,人為修改數(shù)據(jù)。
(5)日志管理功能:能夠?qū)芾韱T的操作情況、報警等信息進行全面記錄,方便查看系統(tǒng)運行情況。
4.2 操作界面
(1)歡迎界面。
歡迎界面如圖9所示。
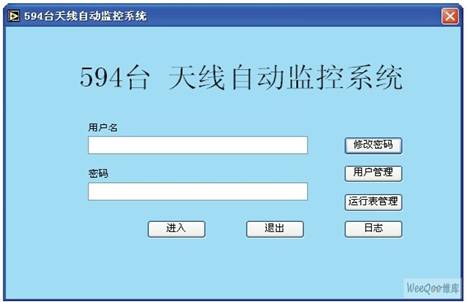
圖9 歡迎界面
說明:登錄界面提供了用戶鑒權(quán)功能,只有具有管理員身份和密碼的用戶才可以使用本系統(tǒng),確保系統(tǒng)安全。
(2)工作模式選擇
說明:系統(tǒng)提供自動和手動兩種工作模式,用戶可在登錄后選擇使用;日志為系統(tǒng)使用情況和故障的記錄,用戶可在此直接進入查看。
(3)主界面(自動運行)
天線系統(tǒng)自動運行主界面如圖10所示。
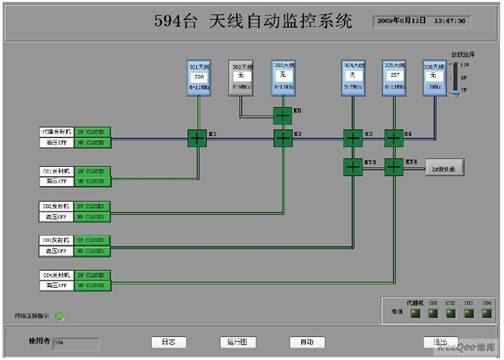
圖10 天線系統(tǒng)自動運行主界面
說明:
①系統(tǒng)的基本功能為自動、手動、日志查看功能,在主界面的最下端以按鈕的形式顯示。
②圖10中的綠色線條表示播音機天線通路接通,灰色表示天線通路未接通。
藍(lán)色線條表示代播機天線通路接通。
4.3 軟件的基本流程圖
執(zhí)行流程圖為軟件主流程,完成系統(tǒng)功能(見圖11)。執(zhí)行流程的簡單過程如下。
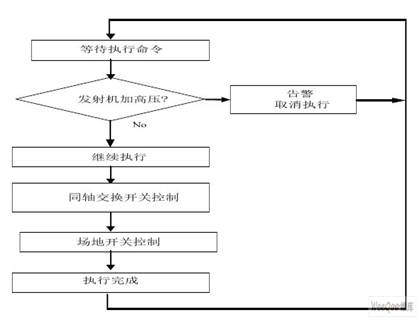
圖11 執(zhí)行流程圖
選擇好需要切換的設(shè)備(或開關(guān))后,點擊“執(zhí)行”按鈕,實現(xiàn)天線和假負(fù)載、代播機和發(fā)射機的自動切換,執(zhí)行步驟如下:
第一步:等待“執(zhí)行”命令,若“執(zhí)行”
命令到達(dá),執(zhí)行第二步。
第二步:檢查發(fā)射機的狀態(tài),看是否連接到相關(guān)的發(fā)射機,若發(fā)現(xiàn)發(fā)射機的連接,執(zhí)行第三步,否則取消執(zhí)行并發(fā)出告警提示。
第三步:執(zhí)行同軸交換開關(guān)的控制程序,實現(xiàn)天線和假負(fù)載的自動切換。
第四步:執(zhí)行場地開關(guān)的控制程序,實現(xiàn)發(fā)射機和代播機的自動切換。
5 結(jié)束語
天線控制系統(tǒng)投入使用已有2年多,在安全播出日常運行中,系統(tǒng)工作穩(wěn)定,使用簡捷靈活,既減輕了機房值班員的維護工作量,又減少了故障率,為機房安全播出起到了有力的保障作用。
