
1.前言
短波發(fā)射主要用于各廣播電臺之間,各核潛艇之間的相互通信。發(fā)射機主要由電控邏輯裝置、過荷保護裝置、頻率預置和自動調諧裝置等組成。為了保證發(fā)射機能工作在所需的頻率值,必須對高頻回路進行精密調諧;原來的調諧控制單元是由大量電位器、繼電器構成,采用繼電器邏輯控制方式,用繼電器的接點組合成邏輯功能,硬件電路多而復雜,可靠性低。
本設計采用現(xiàn)場可編程門陣列來完成電子系統(tǒng)集成化,以使整個系統(tǒng)達到高可靠性、高集成度、優(yōu)品質、低成本、微功耗、小體積的目的,以便實現(xiàn)對電臺的遠程監(jiān)控和管理。
2。系統(tǒng)設計
一般短波發(fā)射機具有“手動”、“預置”、“半自動”、“自動”四種調諧方式,本論文主要討論自動調諧方式的設計。
2.1系統(tǒng)的組成及工作原理
自動調諧是指在調諧過程中根據(jù)當前發(fā)射機的工作頻率,精確地將各個調諧元件調到與該頻率相對應的過程。
整個系統(tǒng)有粗調、細調兩部分構成, 調諧元件均為電感線圈和真空可變電容等,改變其機械轉動圈數(shù)即可改變其電氣參量。通過電機帶動被調元件轉動,即可實現(xiàn)被調元件的電氣參量相應改變。而被調元件的位置信息是通過與該元件機械聯(lián)動的跟蹤電位器的中心抽頭電壓體現(xiàn)的。在EEPROM中存儲有發(fā)射機在不同工作頻率下多路調諧元件所對應的最佳位置信息。調諧過程為:從EPROM中取出該頻率所對應的每一個調諧元件位置信息送給FPGA;FPGA同時從A/D轉換器中讀回各調諧元件當前所處的位置信息,將二者位置信息進行比較,由FPGA的判斷邏輯按其差值的大小和極性來控制步進電機的轉速和方向,直至二者的差值為零,即達到所調頻率的位置。這種自動調諧方式只是粗調,對于精確定位的,還需要進行細調,細調誤差信號由鑒相器和鑒阻器給出。
系統(tǒng)中除A/D (MAX127八路12位轉換器)外,其他所有的功能都集于FPGA中。
2.2 控制單元
在本設計中調節(jié)的執(zhí)行機構選擇的是步進電機,步進電機的角位移量與輸入脈沖嚴格成正比關系,具有良好的開環(huán)跟隨性,沒有累計誤差,定位精度高、動態(tài)響應、反向快,而且通過驅動器的細分,其性能可以大幅提高。
自動調諧主控單元所采用的FPGA是FLEX10K,其擁有獨特的邏輯實現(xiàn)結構—嵌入式陣列和邏輯陣列,每個嵌入式陣列由EABs組成,這些EABs可以非常靈活地實現(xiàn)ROMs、同步和異步FIFOs、雙口RAM等,并可實現(xiàn)在線重配置。本系統(tǒng)采用自頂向下的設計方法,由多個具有特殊功能的邏輯宏單元構成。
主要模塊如下:
(1)時鐘脈沖發(fā)生器宏單元:對于輸入為16MHZ的標準工作頻率,通過計數(shù)方式使其16、10分頻等,直至產(chǎn)生0.5HZ的標準時鐘脈沖輸出。0.5HZ—1MHZ的時鐘輸出以備適用于不同觸發(fā)器的時鐘頻率。
(2)碼制轉換宏單元:對A/D采集的數(shù)據(jù)進行轉換、送顯示。
(3)工作頻率檢測宏單元:設計它的目的是為了檢測實際工作頻率是否合乎標準。通過八個計數(shù)器一秒內累計的脈沖數(shù)來檢測實際高頻信號的工作頻率,八個計數(shù)器可檢測最高幾十兆的工作頻率。
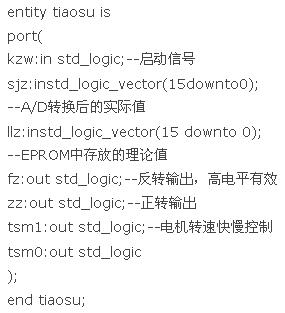
(4)預置位置宏單元:預置位置宏單元輸出調諧元件的理論位置信息。此外,還有地址輸出宏單元、步進電機正/反轉宏單元和八路選擇自鎖宏單元等。
以下是步進電機控制宏單元的設計:由位置預置值與實際位置值之差來控制電機的正反轉;并可以控制電機的轉速(步進電機采用細分控制),如當預置值和實際值最高八位不等時,控制電機以高檔速度轉動;當最高八位相等而D4—D7四位不等時,控制電機以次高檔速度轉動,以此類推根據(jù)不同的比較結果按不同的速度進行快速的調整。其部分VHDL描述語言實現(xiàn)如下:

3.結束語
通過FLEX10K及高速A/D實現(xiàn)的自動調諧系統(tǒng),可以做到自動運行、自動紀錄、自動開關機、自動報警等,提高了工作效率和工作質量,并可以實現(xiàn)對電臺的遠程監(jiān)控與管理,達到對電臺的有效監(jiān)控。