
在科學(xué)技術(shù)飛速發(fā)展的今天,單片機(jī)也日新月異,迅速發(fā)展。目前,他不僅在工業(yè)上有極廣泛的應(yīng)用,而且已普遍地滲透到國民經(jīng)濟(jì)各個部門,特別在交通建設(shè)中起著重要的作用。在目前和今后的交通系統(tǒng)中,車輛檢測器以其交通控制的“耳目”而引起交通工程專家們的高度重視,車輛檢測器可為交通監(jiān)視與控制系統(tǒng)提供車輛感應(yīng)信號,提供有關(guān)交通環(huán)境條件的情報(bào)與數(shù)據(jù)。車輛檢測器的種類很多,檢測方式也各不相同,目前主要使用的車輛檢測器有電磁式車輛檢測器、地磁式車輛檢測器、超聲波式車輛檢測器、環(huán)形線圈(有源和無源兩種)車輛檢測器等。這些檢測器的主要工作原理各不相同,但他們都是基于車輛通過或存在,使檢測器中能量發(fā)生變化而產(chǎn)生車輛感應(yīng)信號。
綜合考慮,車型自動識別(AVI)技術(shù)本身固有的適應(yīng)性強(qiáng),識別正確率高,可全天候使用,還有容易與計(jì)算機(jī)網(wǎng)絡(luò)、數(shù)據(jù)庫等技術(shù)融合的優(yōu)點(diǎn),可以比較方便地實(shí)現(xiàn)聯(lián)網(wǎng)及自動收費(fèi)等業(yè)務(wù);隨著技術(shù)的進(jìn)步和經(jīng)濟(jì)的發(fā)展,在解決了其初期投資過于昂貴的問題之后,認(rèn)為他應(yīng)該是國內(nèi)最有前途、最可能采用的一種車型自動分類技術(shù)。
2 國內(nèi)外車型分類技術(shù)應(yīng)用現(xiàn)狀
所謂車型指的就是人們根據(jù)車輛在行駛時對道路損壞程度和占用程度的不同而把車輛進(jìn)行分類的類型。車輛分型的目的是為了按不同的費(fèi)率核收通行費(fèi)。大車對道路的損壞程度和占用程度大,收費(fèi)就高;小車對道路的損壞程度和占用程度都小,收費(fèi)就少。因此,分型的依據(jù)主要有兩個,即車輛的體積和載重量。
目前,對車型分類技術(shù)的研究有著2個不同的技術(shù)流派:車型自動分類AVC(Automatic Vehicle Classification)和車型自動識別AVI(Automatic Vehicle Identification)。前者是通過檢測車輛本身固有的參數(shù),在一定的車型分類標(biāo)準(zhǔn)下運(yùn)用適當(dāng)?shù)姆诸愖R別算法,主動地對車輛進(jìn)行分型;后者則是通過車載單元與收費(fèi)設(shè)施間的無線通訊,自報(bào)家門式地實(shí)現(xiàn)車型的分類確認(rèn)。
對于車型自動分類技術(shù)AVC而言,國內(nèi)外目前采用的大都是以通過檢測車輛本身固有參數(shù),間接地按車輛設(shè)計(jì)載重量進(jìn)行分類的按車型收費(fèi)方式。這是因?yàn)檐囕v本身的固有參數(shù),如:車長、車寬、車高、車輪直徑、輪距、輪數(shù)、軸數(shù)、軸距、底盤高度及外形尺寸等都與車輛的載重量有著較為密切的關(guān)系且比較容易采集。
3 電磁式車輛檢測器的原理
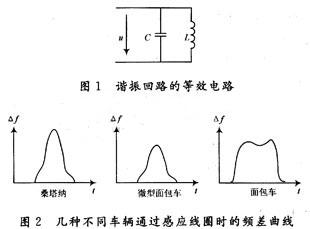
電磁式檢測器可檢測車輛的通過和存在。檢測器的探頭采用高導(dǎo)磁率的材料做成磁芯體,在其外層骨架上繞制線圈,放置于保護(hù)筒內(nèi),埋設(shè)于路面下。通過引線將探頭與檢測電路相連。探頭線圈與檢測電路上的電容并聯(lián),構(gòu)成諧振回路,他的等效電路如圖1所示,其諧振頻率為:

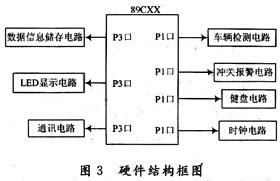
電磁式車輛檢測器的原理是采用電磁感應(yīng)檢測技術(shù),即根據(jù)不同車輛通過埋設(shè)于道路下的環(huán)形感應(yīng)線圈時,引起其電感量不同的變化來檢測車輛的到達(dá)和離開,并進(jìn)行車型分類。系統(tǒng)的關(guān)鍵部分為線圈探測器,他由感應(yīng)線圈和控制部分組成。當(dāng)沒有車輛通過時,振蕩器的頻率為f0,當(dāng)有車輛以一定速度接近并從其上通過時,線圈的電感參數(shù)發(fā)生變化,進(jìn)而引起振蕩器的振蕩頻率發(fā)生微弱變化,假定為f1。在車輛行駛過程中,由于車輛底盤形狀是不同的,因此f1也將隨之而發(fā)生變化,當(dāng)車輛離開環(huán)形線圈后,振蕩器的頻率又將恢復(fù)到f0,因此得到了隨汽車通行的時刻而變化的值即頻差△f=f1-f0。不同種類的車輛由于底盤的形狀、大小、高低不同,導(dǎo)致其對線圈的影響也不同,也即導(dǎo)致振蕩器頻率變化△f也不同,不同類型車輛通過線圈時的頻差曲線是不同的。這樣,可以反過來通過△廠的不同判別車輛的通過和存在,圖2是不同車輛通過感應(yīng)線圈時得到的頻差曲線。
電磁式檢測器既是通過型,又是存在型,可檢測流量和車速,其檢測范圍為4米車道。此種檢測器成本低,穩(wěn)定性好。
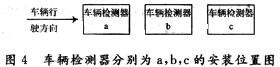
4 硬件結(jié)構(gòu)框圖
其硬件電路是以Atmel公司生產(chǎn)的89CXX系列單片機(jī)為核心器件,使用了多種功能的新型接口芯片擴(kuò)展接口電路。接口電路包括車輛檢測電路、沖關(guān)報(bào)警電路、數(shù)據(jù)信息儲存電路、車輛計(jì)數(shù)顯示電路、時鐘電路、鍵盤電路、通信電路等。其硬件結(jié)構(gòu)框圖如圖3所示。
5 軟件程序流程圖
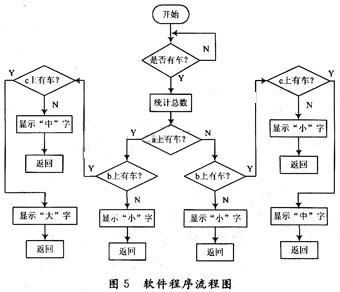
根據(jù)電磁式檢測器的原理,把3個電磁式檢測器串埋于路面下,并把3個電磁式檢測器的輸出信號送給單片機(jī)進(jìn)行處理。當(dāng)3個電磁式檢測器同時都有信號輸出時,就為大車,當(dāng)2個電磁式檢測器(相鄰的)同時有信號輸出時,就中車,只有一個電磁式檢測器有信號輸出時,就為小車;并且不管是大車、中車還是小車,只要有車輛通過或存在時都進(jìn)行計(jì)數(shù)統(tǒng)計(jì)和顯示。
假設(shè)3個電磁式車輛檢測器分別為a,b,c,安裝位置如圖4所示。
則軟件程序流程圖如圖5所示。
對我國而言,由于現(xiàn)行統(tǒng)一的車型分類標(biāo)準(zhǔn)是按車輛一的抽象特征(客車按額定座位數(shù),貨車按額定載重量)對收費(fèi)車輛進(jìn)行劃分的,目前的研究現(xiàn)狀表明,各種車型自動分類技術(shù)都未能達(dá)到真正的實(shí)用化要求(識別正確率99.999 9%);同時,基于電子標(biāo)簽的車型自動識別技術(shù)在世界各國成功地應(yīng)用,這為我國的自動收費(fèi)提供了良好的借鑒,中國交通部智能交通研究中心(ITSC) 調(diào)研表明,采用高安全性的預(yù)付卡開展公路收費(fèi)的電子支付業(yè)務(wù)是必然的發(fā)展趨勢,采用雙界面IC卡和雙片式ETC電子標(biāo)簽作聯(lián)網(wǎng)收費(fèi)系統(tǒng)的預(yù)付卡介質(zhì)。