
【摘 要】 介紹了TMS320F240數(shù)字信號處理單片機(jī)在直接轉(zhuǎn)矩控制系統(tǒng)中的應(yīng)用,給出了控制系統(tǒng)的軟硬件關(guān)鍵設(shè)計。
關(guān)鍵詞:直接轉(zhuǎn)矩控制,DSP,異步電機(jī)
1 引 言
直接轉(zhuǎn)矩控制是一種高性能的交流調(diào)速技術(shù),它直接在定子坐標(biāo)系下分析交流電機(jī)的數(shù)學(xué)模型,控制電動機(jī)的轉(zhuǎn)矩和定子磁鏈,簡化了系統(tǒng)的結(jié)構(gòu)。但是直接轉(zhuǎn)矩控制強調(diào)轉(zhuǎn)矩和定子磁鏈控制,對轉(zhuǎn)矩和定子磁鏈空間位置計算精度要求很高,因而系統(tǒng)構(gòu)成比較復(fù)雜,要實現(xiàn)有效的直接轉(zhuǎn)矩控制,高性能的單片機(jī)是必不可少的。德州儀器的TMS320F240數(shù)字信號處理單片機(jī)專門針對電機(jī)控制系統(tǒng)設(shè)計,本文介紹它在直接轉(zhuǎn)矩控制中的應(yīng)用。
2 直接轉(zhuǎn)矩控制系統(tǒng)簡介
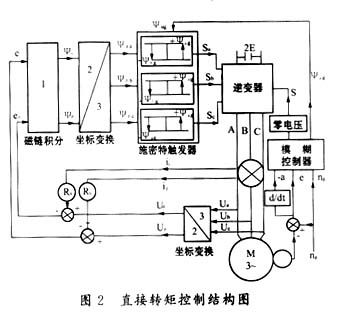
直接轉(zhuǎn)矩控制系統(tǒng)原理圖如圖1。

在圖1中,適當(dāng)控制逆變器的開關(guān)Sa、Sb、Sc(包括Sa、Sb、Sc下橋臂非門)的狀態(tài),就能夠得到八種空間矢量電壓,除兩種是0矢量外,另外六種矢量構(gòu)成正六邊形的六條邊,在異步電機(jī)上得到旋轉(zhuǎn)的定子空間磁場,并且通過0電壓矢量調(diào)節(jié)定子磁場的平均旋轉(zhuǎn)速度。
為了得到圖1中的正六邊形軌跡磁場(用來替代三相交流電產(chǎn)生的圓形軌跡磁場),確定磁場的空間位置成為重要的工作環(huán)節(jié)。根據(jù)![]() -isRs)dt可以求出定子磁場的大小,但為了減少電壓和電流傳感器的數(shù)量,通常只使用兩相傳感器,通過計算再得出另外一相電壓和電流。
-isRs)dt可以求出定子磁場的大小,但為了減少電壓和電流傳感器的數(shù)量,通常只使用兩相傳感器,通過計算再得出另外一相電壓和電流。
3 控制系統(tǒng)的硬件組成
本系統(tǒng)以TI公司的TMS320F240數(shù)字信號處理單片機(jī)為核心,控制日本FUJI生產(chǎn)的IPM(智能功率模塊),從而把直流電壓轉(zhuǎn)換成交流矢量電壓,驅(qū)動異步電機(jī)運轉(zhuǎn)。其基本工作過程是:首先根據(jù)外部給定的轉(zhuǎn)速和轉(zhuǎn)矩要求,計算出定子磁場的幅值,然后建立定子磁場,最后施加工作電壓產(chǎn)生旋轉(zhuǎn)定子磁場。因此,我們按照圖2的硬件結(jié)構(gòu)結(jié)合DSP單片機(jī)的特點設(shè)計系統(tǒng)。
由于TMS320F240本身帶有A/D轉(zhuǎn)換器,所以我們沒有必要再外加A/D轉(zhuǎn)換。同時,電機(jī)的轉(zhuǎn)速采用軟件計算獲得,因而沒有速度檢測環(huán)節(jié),使系統(tǒng)硬件最小化。


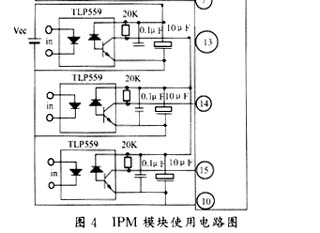
IPM智能功率模塊是集成功率開關(guān)元件,在系統(tǒng)中的位置舉足輕重。FUJI生產(chǎn)的6MBP50RA060型IPM采用低電平有效觸發(fā),在使用過程中要注意4 DSP處理器擴(kuò)展設(shè)計的說明
F240型號的微處理器專門針對電機(jī)控制而設(shè)計,片內(nèi)集成有許多外設(shè),我們可以利用的有:
(1)兩個十位的A/D轉(zhuǎn)換器,每個A/D轉(zhuǎn)換器可以轉(zhuǎn)換八路模擬量,因此,片內(nèi)共有十六路A/D轉(zhuǎn)換通道,不需A/D轉(zhuǎn)換擴(kuò)展。
(2)16k的閃存EEPROM,可以直接作為程序存儲器,不需要程序存儲器擴(kuò)展。
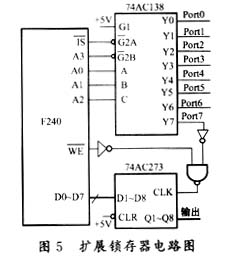
(3)數(shù)字I/O接口,在適當(dāng)寫入IOSR寄存器時,可以當(dāng)作輸入輸出接口使用,在本系統(tǒng)中,由于直接從I/O接口輸出控制矢量,并且要求控制矢量能夠延續(xù)一個控制周期,所以我們對I/O接口外加了鎖存器。其電路圖見圖5。
(4)盡管F240內(nèi)部有產(chǎn)生脈沖信號的PWM發(fā)生器,但是不便于在任意時刻產(chǎn)生任意方向的控制矢量,因而放棄使用。
(5)其它如定時器等,后文給出了軟件代碼。
關(guān)鍵字:直接轉(zhuǎn)矩控制 DSP 異步電機(jī)
5 控制系統(tǒng)的軟件設(shè)計
根據(jù)實際硬件設(shè)計和完成控制任務(wù)的需要,我們首先要求出IPM模塊的開關(guān)頻率和定時器的定時長度。IPM模塊的工作頻率為100kHz,所以定時器的中斷間隔應(yīng)為10μs。根據(jù)定時器中斷頻率計算公式:
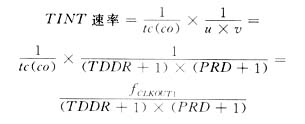

可以計算出PRD和TDDR的值,他們分別對PSC和TIM進(jìn)行加載。式中TINT指定時器中斷,PRD指定時器周期寄存器,TDDR指定時器清除寄存器,PSC指定時器前置分頻計數(shù)器,tc(co)為時鐘周期。
圖6給出了系統(tǒng)軟件流程圖,下面給出定時器(timer)使用的源程序代碼:
clrc CNF;把B0映射為數(shù)據(jù)存儲塊
ldp#0h;DP=0
setc INTM;關(guān)閉所有中斷
splk#0000h,60h;
out 60h,wsgr;設(shè)置為0
周期等待
6 結(jié)束語
近年來,交流調(diào)速發(fā)展迅猛,大有取代直流調(diào)速之勢。交流調(diào)速的控制理論日趨完善,高性能的單片機(jī)又為這些理論的實踐提供了硬件保障。本系統(tǒng)采用直接轉(zhuǎn)矩控制策略,盡量減少硬件投入,不僅大大節(jié)省了硬件成本,而且可靠性高,調(diào)速性能良好。